近來我們對人類演化史的認知突飛猛進,同時也多了更多謎團。在 2015 年發表論文正式被昭告天下的納萊迪人,是其中一個未解之謎 [1][2]。今年又有一批新的論文問世,現在,我們知道了他們生存的年代,也在另一處發現其他的納萊迪人。
- 延伸閱讀:〈納萊迪人——既原始又現代的南非新星〉
納萊迪人,兼具古老與衍生特徵的南非古人種
納萊迪人的化石自南非出土,是洞穴探險家在 2013 年,探勘一個叫作「升星(Rising Star)」的岩洞系統深處時無意發現的。經過 2 年研究後,納萊迪人的研究報告一經發表,便震撼世界。
發現納萊迪人的地點,位於曾出土大量古代人類化石的遺址:「人類的搖籃(Cradle of Humankind)」附近,然而納萊迪人化石意外重見天日以前,沒人料想得到,在那麼深、那麼黑暗的通道內部,竟然躺著至少屬於 15 位個體,超過 1550 件遺骸!
一群死人骨頭躺在不見天日的地底深處,已經夠獵奇,更神秘的是,保存納萊迪人的迪納萊迪地洞(Dinaledi Chamber)內部,不但見不到任何工具、缺乏用火的痕跡,也幾乎沒有其他動物化石,更缺乏外力涉入的跡象。假如地洞構造沒有經過大幅變動,剩下最可行的解釋就是,遺骸是當年被其他人運送進去的。可是,為什麼?
地洞內部什麼都沒有,就納萊迪人的化石最多。詳加研究後,古人類學家認為地洞內所有化石,應該皆屬於同一物種,因此這是所有非洲遺址中,除了智人以外,一次出土單一人種最多個體的記錄;放眼非洲之外,也只有距今 43 萬年的西班牙胡瑟裂谷遺址,超過這個人數。
- 延伸閱讀:胡瑟裂谷,見〈最古老的尼安德塔人DNA?〉、〈丹尼索瓦人(上):尼安德塔人的神秘近親〉
有了 15 個人,幾乎湊齊了每個部位(只缺了一小部分鼻子),古人類學家可以相當詳盡地,研究這種滅絕生物的型態特徵,如此良機可謂前所未有!一番討論後,研究團隊決定將這種動物歸類為 Homo(人屬),命名為新種 Homo naledi。
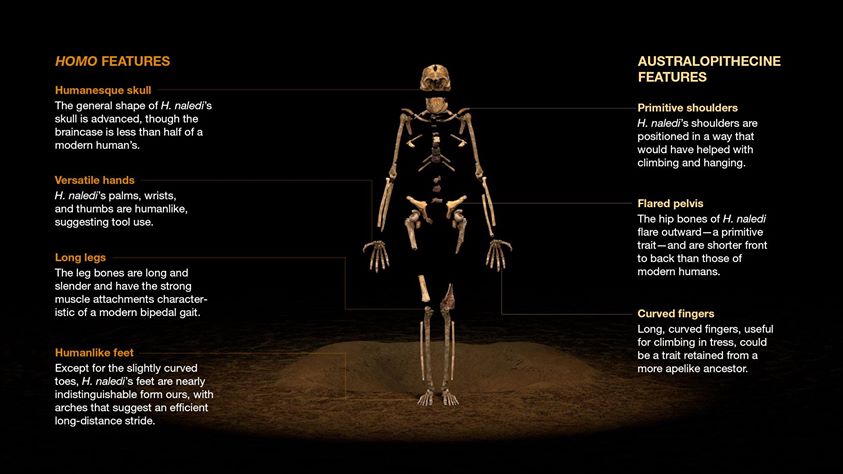
儘管分類為 Homo,納萊迪人有些型態特徵卻更類似南猿(Australopithecus),特別是屬於身體核心的部位,像是肩膀和骨盆;而身體外圍,如四肢的構造,還有整體身高,則與人類相似。納萊迪人全身上下,最令人吃驚的大概是腦容量,是只介於 465 到 560 cc 間的南猿等級。所有已知 Homo 中腦袋一樣小的,只有佛洛勒斯人(Homo floresiensis),可是佛洛勒斯人是住在離非洲很遠,東南亞外海的佛洛勒斯島上;納萊迪人卻是住在南非,人類演化的大本營。
- 延伸閱讀:關於佛洛勒斯人,請見〈哈比人的奇幻漂流 佛洛勒斯島洞窟裡的大謎團〉
出乎意料的接近現代
兼具各家人種型態的納萊迪人,與其他人種之間的關係,難倒了各方大德。一大問題在於不知道他生存的年代;由型態判斷,配備許多古早人種型態的納萊迪人,生存於超過 100 萬年以前,應該是較為合理的推論。只是,迪納萊迪地洞的狀態相當難以定年;之前只能確定納萊迪人的年代,超過碳同位素定年法的 5 萬年極限。
近期發表的一篇論文,報告了研究團隊 4 年來努力的成果 [3]。由於納萊迪人躺在地洞裡面,因此他們躺著的地層,必定要比人進洞的年代更早形成;採取 US-ESR 定年(combined U-series and electron spin resonance dating)這個方法,估計的結果是 23.6 萬年前,可見納萊迪人生存的年代,距今至少有 23.6 萬年。
定年時只採用單一方法或許會有偏差。研究團隊還從 3 顆牙齒上取得樣本,使用鈾釷定年法(uranium-thorium dating)估計年代;此一方法之前曾用在胡瑟裂谷遺址,順利得知那批型態上接近尼安德塔人,卻又不完全像是尼安德塔人的化石,生活在 43 萬年前。而這回納萊迪人的鈾釷定年法結果是,距今 33.5 萬年。
- 延伸閱讀:科學人雜誌文章–〈搭乘鈾釷時光機重返遠古世界〉
綜合不同定年方法的估計值,論文作出結論,納萊迪人進入迪納萊迪地洞的年代介於 23.6 到 33.5 萬年以前,遠比多數古人類學家的猜測,更加晚近許多。
更多更多的納萊迪人
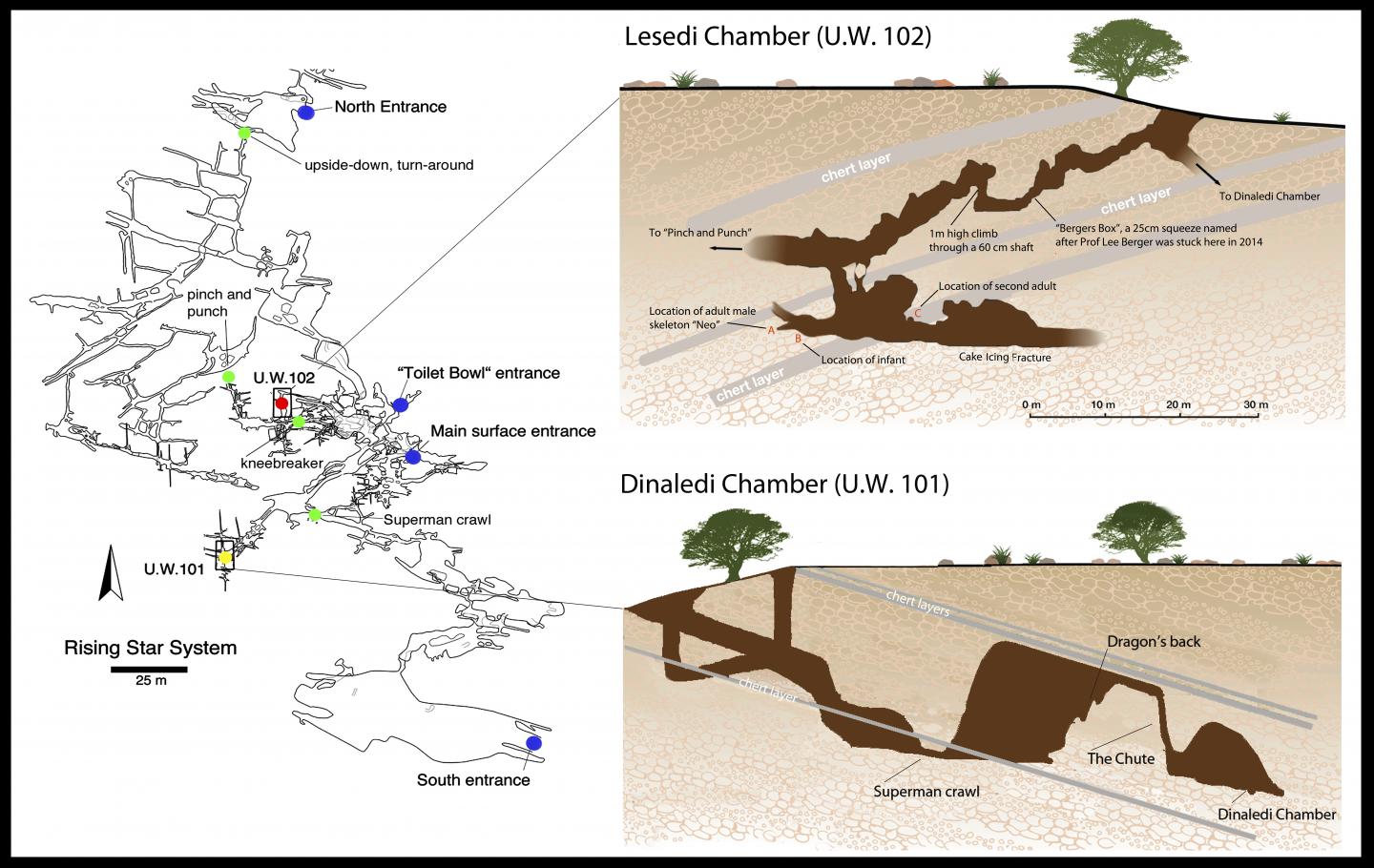
得知納萊迪人的年代以外,同時發表的另一篇論文,則報告了更多的化石 [4]。同屬升星岩洞系統,另一個更難抵達的「勒塞迪地洞(Lesedi Chamber)」中,又找到 133 個樣本,至少屬於年紀 2 大 1 小的 3 位個體。
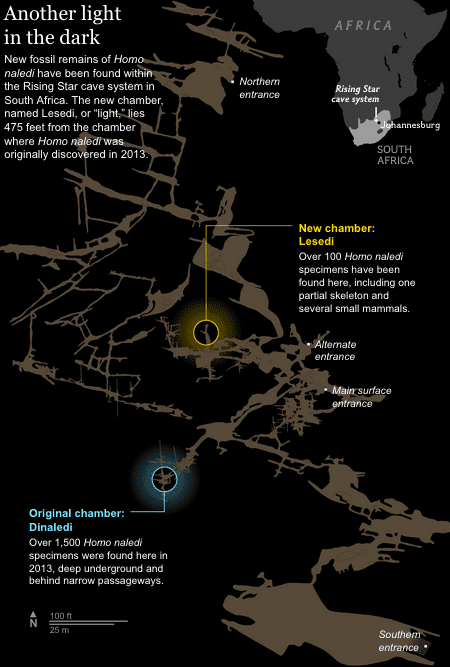
通往勒塞迪地洞的路線,跟迪納萊迪地洞不同;一樣的是,第二處遺址一樣難以抵達,內部只有死人骨頭,沒有工具,沒有生火跡象,也沒有其他動物化石。這表示我們第一次認識納萊迪人時,其遺址的奇特狀態並非特例。
新一批化石樣本,補足了之前納萊迪人型態上未知的最後一部份。其中一位個體腦容量達 610 c.c.,終於超越了星巴克特大杯(Venti),是已知 18 位納萊迪人中最多的,使得目前已知的納萊迪人腦容量,約介於星巴克大杯(Grande)到特大杯,也就是 465 到 610 c.c. 之間。

如今納萊迪人已經累積到將近 1700 件死人骨頭,分屬 18 個人,全身上下每一部位都至少有一件樣本,有大人、也有小人。在已知的滅絕人種中,這般完整性僅次於尼安德塔人,排名第二。
知之為知之,不知為不知,是知也
這麼多化石,能告訴我們什麼訊息?且慢,也許非洲其他地方早已出土過納萊迪人,只是化石不夠完整,沒被注意到?一起發表的第三篇,探討納萊迪人意義的長篇評論論文,特地檢查了這個可能性,確認在已知的非洲 hominin 化石中,真的沒有納萊迪人 [5]。因此可以判斷,納萊迪人是在南非一種獨一無二的存在。

先整理已知的訊息。納萊迪人生活在南非,距今 23.6 到 33.5 萬年前;外形兼具 300 多萬年前南猿的古早特徵,也有後來 Homo 的衍生型態,腦容量介於 465 到 610 cc;找到化石的地點,分別位於 2 個地下深處的地洞,旁邊沒有任何工具、用火跡象,也幾乎沒有其他動物化石,他們就這樣一直躺在那裡,與世隔絕至今。
化石的完整性,是值得重視的問題。絕大部分出土的古人類個體,都相當殘缺,只保留幾塊骨頭,如納萊迪人這般完整的相當稀少。可以設想,假如是在別的地方找到納萊迪人,而且是只發現某一部位,我們會作出什麼判斷?
假如只發現南猿般的骨盆,納萊迪人多半會被歸類為某種南猿;只知道 Homo 般的四肢,納萊迪人也許就成了直立人(Homo erectus)。在大部份時候,古人類學研究的材料都十分有限,納萊迪人給我們的啟示是,只憑極為有限的材料,千萬別驟下過於武斷的結論!
智人祖先的鄰居
年代,是認識古人類的關鍵,然而許多化石的年代其實沒那麼肯定。過往在判斷化石的年代時,常受到其型態影響,比方說,當學者見到與南猿類似的特徵時,很容易先入為主的推論,這件化石的年代有幾百萬年。然而納萊迪人化石配備古老型態,年代卻出乎意料接近現代,告訴我們若是只用型態估計年代,又受到先入為主的定見影響,相當容易誤判,作出錯誤推論。
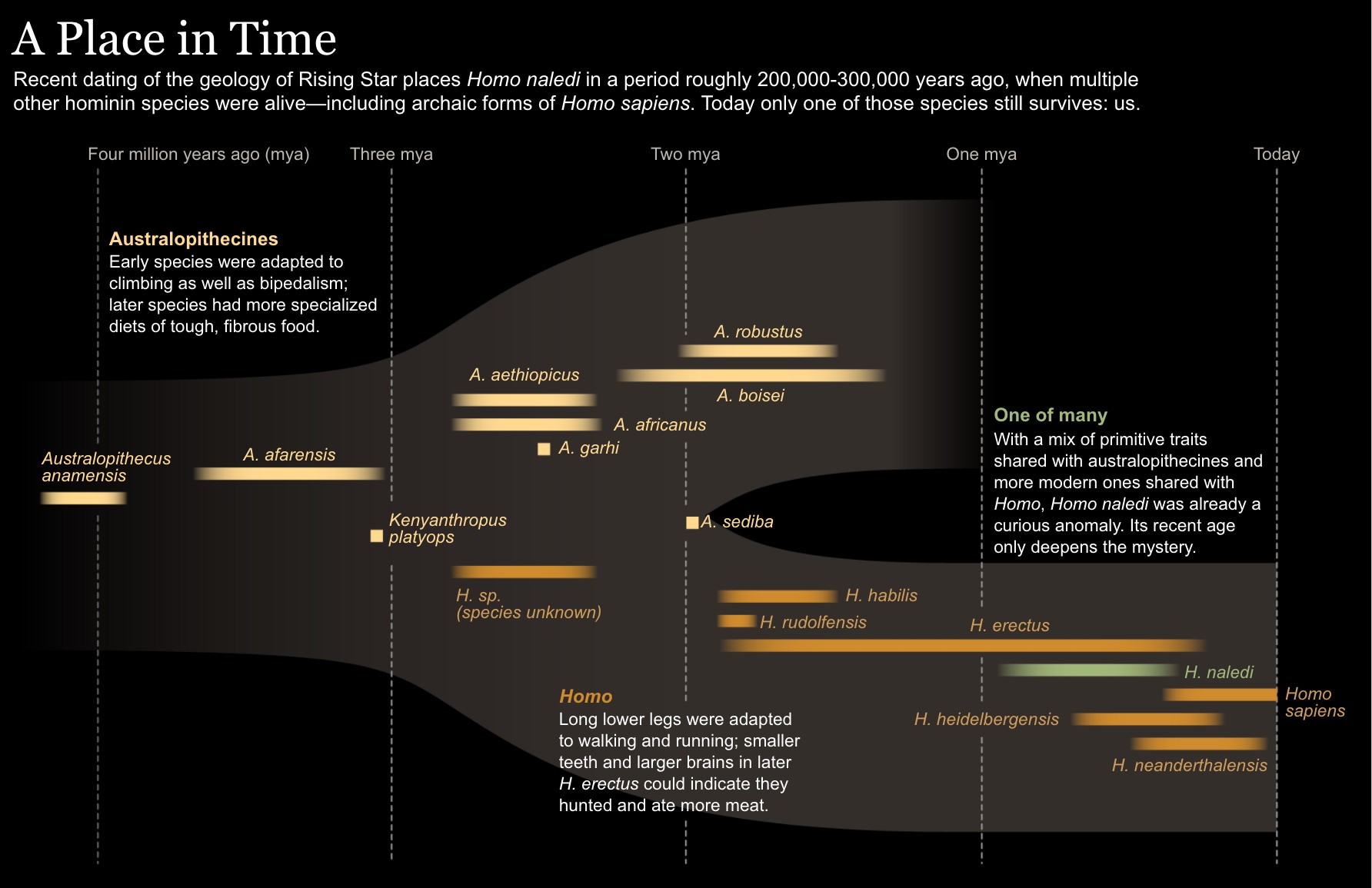
假如定年結果正確,納萊迪人生活在距今頂多 34 萬年,可能只有 20 多萬年前的南非。那是在人類演化史上,一段相當有意思的時空,因為我們所屬的智人,正是在 20 到 30 多萬年前的東非、南非一帶,孕育而成的物種(不過衍生為智人以前的那個物種,是叫海德堡人(Homo heidelbergensis)、羅德西亞人(Homo rhodesiensis)、還沒進擊的智人,並沒有共識,論文本身倒是沒有特別描述。
- 延伸閱讀:〈海德堡人-人類承先啟後的演化關鍵〉
納萊迪人與智人的祖先,似乎曾共存於同一個時空,不過目前除了地底深處,還沒有在任何地方見過他們的蹤影,也無從知道他們和智人祖先間有沒有互動,甚至是情慾流動過。同樣的,南非在那段時間製造的石器,甚至是表現象徵行為的記錄,如今也無法排除不是納萊迪人的手筆;畢竟他們腦袋雖小,卻很可能有能力把同類拖進深深黑黑的洞洞裡,不可小覷。
- 延伸閱讀:關於現代行為,請見〈摩登原始人(上):現代行為的起源〉
天啊!東南亞海上的小島就算了,在智人於非洲大陸演化的核心階段,竟然一旁還有個以前我們完全不知道,會把人拖進地洞的小腦袋人種?
地位未定的家族新成員
儘管已經知道年代,也有了更多化石,納萊迪人跟其他 hominin 間的關係卻仍無法釐清,因為它兼具古早與衍生的型態特徵,好像置於人類演化樹上的大部份位置都不違和。有關納萊迪人在家族中的位置,論文提出 3 種假說。
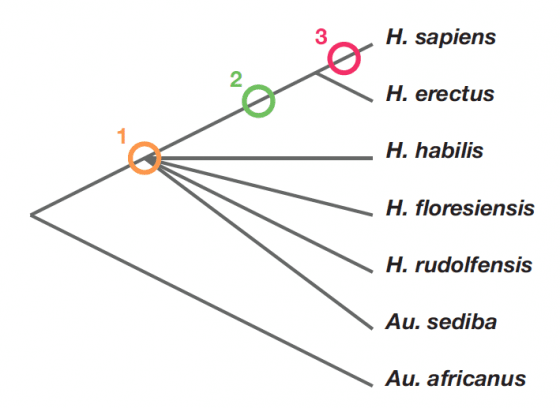 納萊迪人與親戚分家年代的3個假說。圖/ref 5
納萊迪人與親戚分家年代的3個假說。圖/ref 5
一個可能是,等到智人與直立人分家以後,納萊迪人才與智人祖先分家(上圖 3);不過若要符合此一假說,納萊迪人大把南猿般的特徵,就要是先演化的像人,後來又再度變回類似南猿。(本文作者看法:機率似乎不大?)
另一可能是,等到直立人與其他 Homo 分家以後,納萊迪人再由某個直立人族群演化而成(上圖 2)。最後一個可能是,納萊迪人是在 200 萬年前左右,也就是巧人(Homo habilis)、魯道夫人(Homo rudolfensis)、直立人分家的時候,與親戚們分家(上圖 1)。若要符合這 2 個假說,納萊迪人像人的衍生型特徵,就會是與 Homo 親戚們,各自獨立演化的結果。
根據目前證據,3 個假說都有勝算。不過不管哪一個才正確,納萊迪人都保留著某些存在 200 多萬年之久的古早型態,一直生存到至少 30 多萬年前,跟佛洛勒斯人類似;而 2 種以前未知的非典型 Homo 成員,也翻轉了我們對人類演化史的認識。
納萊迪人跟其他 Homo 親戚的關係為何?他們有多聰明?他們跟智人祖先打過交道嗎?他們為什麼跑進洞裡?他們怎麼跑進洞裡?他們怎麼生活,又是怎麼死的……?
以上問題的答案,目前我們全都不知道,只能等待更多研究問世。此時此刻,各位有智慧的大猿們,不妨先盡情享受新知識吧。
參考資料:
- Berger, LR et al. (2015). Homo naledi, a new species of the genus Homo from the Dinaledi Chamber, South Africa. eLife
- Dirks, PHGM et al. (2015) Geological and taphonomic evidence for deliberate body disposal by the primitive hominin species Homo naledi from the Dinaledi Chamber, South Africa. eLife
- Dirks, P. H., Roberts, E. M., Hilbert-Wolf, H., Kramers, J. D., Hawks, J., Dosseto, A., … & Hellstrom, J. (2017). The age of Homo naledi and associated sediments in the Rising Star Cave, South Africa. eLife, 6, e24231.
- Hawks, J., Elliott, M., Schmid, P., Churchill, S. E., de Ruiter, D. J., Roberts, E. M., … & Feuerriegel, E. M. (2017). New fossil remains of Homo naledi from the Lesedi Chamber, South Africa. eLife, 6, e24232.
- Berger, L. R., Hawks, J., Dirks, P. H., Elliott, M., & Roberts, E. M. (2017). Homo naledi and Pleistocene hominin evolution in subequatorial Africa. eLife, 6, e24234.
本文亦刊載於作者部落格《盲眼的尼安德塔石匠》暨其 facebook 同名專頁。