



我們,也就是智人,與黑猩猩的共同祖先已經分家了約700萬年。在這段時光裡許多物種相繼誕生,而人屬(Homo)大概在280萬年前出現,旗下的直立人、尼安德塔人、丹尼索瓦人等等人種起了又滅,時至今日,只剩智人獨存。
眾多人種中,在時間上延續很久、地理上分佈很廣的海德堡人(H. heidelbergensis)處在承先啟後的關鍵位置。然而,關於海德堡人的相關爭論相當多,許多推論至今也少有定論,甚至連他存不存在都還有爭議。不過要了解人類演化,絕不能忽視海德堡人,因為他們不但有很大的機會是尼安德塔人的祖先,也很有可能是智人的直系祖先。
第一個海德堡人
第一個海德堡人的化石,年代大概距今60萬年[1],在1907時於德國的毛爾(Mauer)地區出土,編號「Mauer 1」,由於發現地很接近海德堡城,所以這個化石被命名為海德堡人。Mauer 1沒有頭蓋骨,只有下顎與牙齒。身為第一個被發現與命名的海德堡人,Mauer 1自然而然成為海德堡人的模式化石。
然而100多年來,考古學家儘管發現許多形態類似Mauer 1的化石,卻再也沒有找到第二個跟Mauer 1一模一樣的樣本。這也導致海德堡人少了一個所有人都接受的定義,每位考古學家都有自己的一套「海德堡人判斷標準(heidelbergensis hypodigm)」,大家拿著自己的標準,認定哪些化石是海德堡人、哪些不是,所以判定上爭議連連,不同人的見解,有時候差異非常非常多。
行遍歐亞非洲,縱橫50萬年的海德堡人?
儘管沒有第二個化石和Mauer 1一模一樣,考古學家多年來卻在各地找到許多形態類似的化石。人類演化學家Chris Stringer在2012年寫了一篇回顧論文,列出一套判斷海德堡人的標準[2]。他的標準比較寬鬆,他肯定海德堡人同時散佈於歐洲與非洲,也很可能生存於東亞。
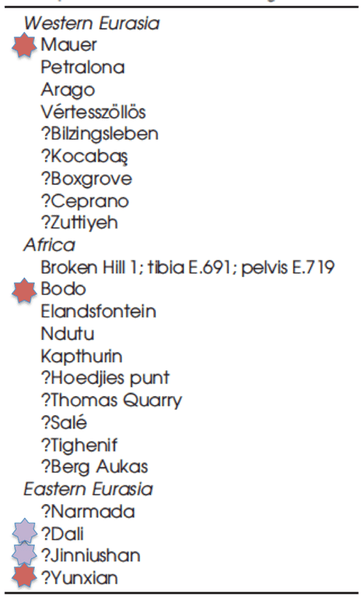
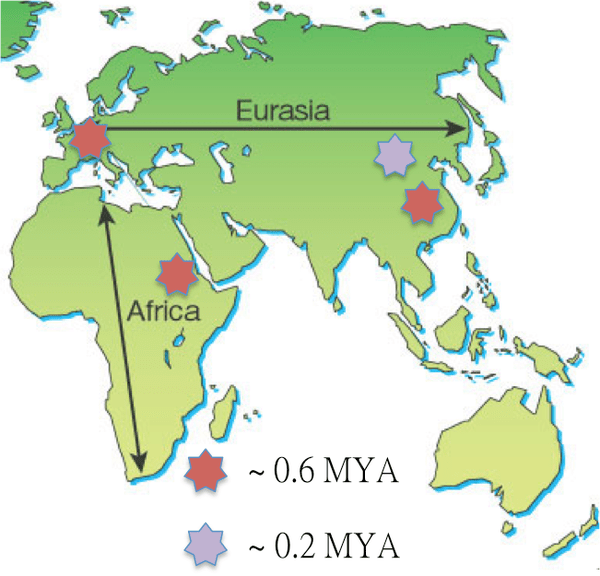
人類演化的歷史,直到2萬年前左右才進入美洲,因此討論古代人種的分佈與遷徙時,只會著重在非洲與歐亞大陸。Stringer對於海德堡人的起源假設相當大膽,按照他的標準,最早一批海德堡人分別位於歐洲德國的毛爾、非洲衣索比亞的波多(Bodo)、以及東亞中國的鄖縣(Yunxian),三者都距今約60萬年(見圖一與圖二紅色標記)。年代相同,意謂歐、亞、非三地都可能是海德堡人的起源地,海德堡人是先在某個地方演化出現,再走過漫漫長路,遷徙到另外2個地方。
這個想法相當大膽,且不是沒有可能,然而中國的鄖縣化石定年過好幾次,的確有一次結果大概是60萬年前[3],其他幾次卻都早於80萬年[4],比北京人更早。筆者認為,把鄖縣的部分刪掉,Stringer的假說就相當合理,海德堡人可能起源於比60萬年更早的歐洲或非洲,假如起源於非洲,就是之後遷徙到歐洲,反之亦然。
Stringer對於海德堡人曾經生存於東亞的假說相當執著,他認為東亞的大荔(Dali)與金牛山(Jinniushan),兩地距今20多萬年前的化石(見圖二紫色標記),都有海德堡人的特徵,也許都可以歸類為海德堡人(Stringer甚至強烈懷疑,他們就是神秘的丹尼索瓦人)。
以Stringer的看法,大荔與金牛山人可能是更早的鄖縣人後裔。不過,假如真的把他們視為海德堡人,也有可能是來自歐亞大陸東西方的交流,歐洲的海德堡人後來千里迢迢來到東亞的後代。
先不管東亞,假如歐洲與非洲的一系列化石都被視為海德堡人,那麼海德堡人就是個從60多萬年前已經在歐洲與非洲存在,一直延續到12.5萬年前的非洲,生存了50萬年左右的長壽物種;假如把東亞也算進去,如此一來,海德堡人就是在智人之外,唯一一個足跡踏遍舊大陸歐亞非三大洲的人種了。
百萬年全境封閉的非洲大陸?
假如Stringer的觀點是對的,那麼解釋後來人類演化最簡單明瞭的說法,就是海德堡人的歐洲族群,在歐洲演化出尼安德塔人;海德堡人的非洲族群,則在非洲演化出智人,也就是我們的祖先。
不是所有人都買帳Stringer的見解。有些考古學家認為,歐洲與非洲兩地的化石也許長相類似,卻應該是不同人種。Maria Martinon-Torres等3人在2011年時寫了一篇評論[5],其中有一部分就討論到這個問題;這篇評論有可觀之處,討論的問題也相當有意思,不過委婉的講,雖然它的標題有丹尼索瓦人,有關丹尼索瓦人的部分可以全部無視。
這篇評論提到幾個理由,反駁海德堡人是個同時散佈於歐洲與非洲的人種,其中一大有力的證據是地理障礙。會遷徙的不只人類,還有許多其他生物,世界上某些地方存在天然障礙,阻擋生物散播,導致地圖上距離很短的兩側生物分佈差異很大,例如東南亞很有名的華萊士線,兩邊的生物相就相當不同。
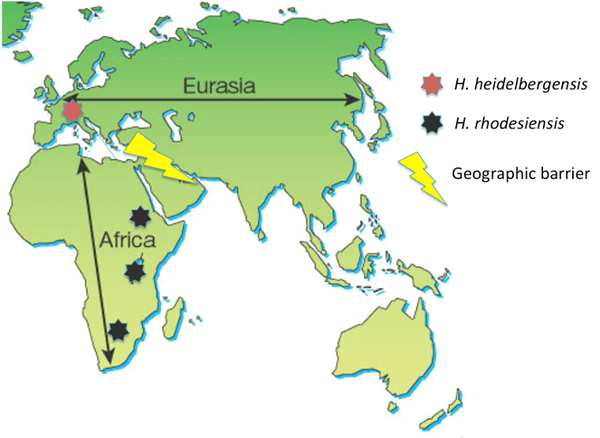
要進出非洲,一定要通過東北非與西南亞這條路線,當初智人的祖先就是先穿越了這條路,之後才散佈到全世界。人類屬於哺乳類,但目前的考古研究發現,在12.5到50萬年前這段時間,幾乎沒有哺乳類成功從非洲離開,而50到80萬年前之間,也僅有稀少的案例。原因似乎是因為進出非洲的必經之路,那時是片氣候極不友善,很難穿越的地區,能阻擋絕大多數哺乳類(見圖三閃電標記)。
40到80萬年前這段期間,是海德堡人演化出現的關鍵年代,出於以上生物相的考古證據,有些人認為海德堡人跟哺乳類一樣,應該也不可能通過沙漠,因此非洲與歐洲長相類似的化石,是在兩地獨立演化出來,而沒有直接的親緣關係。如此一來,就要給那些在非洲發現,長相卻類似歐洲海德堡人的族群一個不一樣的種名(見圖三黑色標記)。他們被稱作羅德西亞人(H. rhodesiensis)。
承先啟後的演化關鍵
然而這個生物地理的觀點雖然有力,卻難以反駁一個顯而易見的事實:海德堡人是會製造工具,大腦只比智人小一點的人,不是一般哺乳類。能有效限制住一般動物的地理障礙,也能長期阻擋聰明的人類嗎?一派人主張羅德西亞人與海德堡人截然不同,另一派人卻認為羅德西亞人就是海德堡人的非洲族群。兩邊都有道理,爭議大概很難在短期落幕。
不過不管抱持哪種看法,多數人應該都同意,羅德西亞人就是智人的祖先,而海德堡人是尼安德塔人的祖先。這也是為什麼,要了解最近十幾萬年內的人類演化,絕對不能忽視海德堡人的原因。近來古代DNA的定序,為解答這些問題,特別是各人種關鍵的分化年代提供了一些線索,不過仍遠遠不足。希望我有生之年能看到這些問題的答案……
參考文獻:
- Wagner, G. A., Krbetschek, M., Degering, D., Bahain, J. J., Shao, Q., Falguères, C., Voinchet, P., Dolo, J., Garcia, T., Rightmire, G. P. (2010). Radiometric dating of the type-site for Homo heidelbergensis at Mauer, Germany. Proceedings of the National Academy of Sciences, 107(46), 19726-19730.
- Stringer, C. (2012). The status of Homo heidelbergensis (Schoetensack 1908). Evolutionary Anthropology: Issues, News, and Reviews, 21(3), 101-107.
- Chen, T. M., Yang, Q., Hu, Y. Q., Bao, W. B., Li, T. Y. (1997). ESR dating of tooth enamel from Yunxian Homo erectus site, China. Quaternary Science Reviews, 16(3), 455-458.
- Vialet, A., Guipert, G., Jianing, H., Xiaobo, F., Zune, L., Youping, W., Li, T., de Lumley, M., de Lumley, H. (2010). Homo erectus from the Yunxian and Nankin Chinese sites: Anthropological insights using 3D virtual imaging techniques. Comptes Rendus Palevol, 9(6), 331-339.
- Martinón-Torres, M., Dennell, R., de Castro, J. M. B. (2011). The Denisova hominin need not be an out of Africa story. Journal of Human Evolution, 60(2), 251-255.
本文亦刊載於作者部落格《盲眼的尼安德塔石匠》暨其 facebook 同名專頁。





































