

- 作者:林彥興|EASY 天文地科小站主編、清大天文所碩士生,努力在陰溝中仰望繁星
萬眾矚目的詹姆士韋伯太空望遠鏡,在經過半年的校準與測試後,終於公開了它拍攝到的第一批成果。這些五彩斑斕、美麗絕倫的照片究竟是什麼樣的天體,照片的背後又有哪些深藏的意義?就讓我們一起深入解密,韋伯的第一批照片吧!
韋伯望遠鏡是什麼?
詹姆士.韋伯太空望遠鏡是美國、歐洲與加拿大太空總署合作開發的新一代旗艦級紅外線太空望遠鏡,也是無數天文學家夢寐以求、能幫助人類破解許多未解天文迷團的利器。
韋伯的研發其實早從 1996 年就已經開始,但是由於開發時遇到諸多困難,導致嚴重的預算超支與進度延宕,這台耗資上百億美金的超級望遠鏡,直到去年年底才終於從法屬圭亞那發射中心,用一枚亞利安 5 號運載火箭發射升空,前往距離地球 150 萬公里的日地第二拉格朗日點。
- 延伸閱讀:為何 NASA 不惜大撒幣也要把它送上太空?——認識韋伯太空望遠鏡(一)
- 延伸閱讀:史上最大口徑的 JWST 要如何塞進火箭?——認識韋伯太空望遠鏡(二)
- 延伸閱讀:太空巨獸 JWST 升空後的 150 萬里長征 —— 認識韋伯太空望遠鏡(三)
拉格朗日點是什麼?
日地拉格朗日點一共有五個。當物體在這些點上,其受到來自太陽與地球的重力恰到好處,因此太空船只需要少量的燃料,就可以長期與地球和太陽保持穩定的相對位置,可謂是地球軌道附近的風水寶地。
而韋伯繞行的,是位於地球後方的第二拉格朗日點,簡稱 L2。之所以選擇這裡,是因為只有 L2 的位置剛好會讓地球、太陽、月亮都在同一側,而這三個星體正是天文望遠鏡的主要紅外線光害來源。位在 L2 的韋伯,就可以用它的遮陽帆一次把三顆星體全部擋住,認真凝望遠方而不受干擾,因此 L2 可以說是觀測宇宙的絕佳地點。升空的幾個月之間,韋伯已經完成一系列的儀器校準工作,一步步把望遠鏡調整到最佳狀態。
相比知名前輩「哈伯太空望遠鏡」,韋伯的優勢不只是擁有比哈伯大六倍的鏡面,更重要的是它是以紅外線為主力觀測波段。宇宙膨脹造成嚴重紅移,但哈伯望遠鏡的守備範圍主要是可見光,波長範圍是 90 – 2500 奈米,可說是鞭長莫及啊。
這時換上以波長 600 – 28500 奈米的紅外線為守備範圍的韋伯,就可以讓我們看到更遙遠、更古老的宇宙。此外,同一個天體在可見光和紅外線看起來,往往長得相當不一樣。這個強大的紅外線觀測能力,正是韋伯最引以為傲的武器。
作為深具儀式感的第一批科學影像,韋伯這次公布的影像分別對應四個主要科學主題:早期宇宙、星系演化、恆星的生命循環與系外行星。
1. 早期宇宙—— 星系團 SMACS 0723 與重力透鏡效應

畫面中心黃白色的天體,是由成百上千的星系共同組成的星系團 SMACS 0723。在韋伯之前,哈伯太空望遠鏡就曾經花費數個禮拜的時間拍攝這個星系團。然而擁有更大鏡面、更精良儀器的韋伯,僅用了 12.5 個小時就拍出了解析度更高、畫面品質更好的照片,讓我們看到許多以前難以辨識的黯淡星系。可見哈伯與韋伯在觀測能力上的差距。
對天文學家來說,圖中最令人興奮的其實不是前景壯闊的星系團,而是後方這些經過重力透鏡扭曲和放大的小小星系們。星系團龐大的質量扭曲了周圍的時空,讓整個星系團好像一塊巨大的放大鏡一樣,可以偏折和聚焦通過的星光,稱為「重力透鏡效應」。
當星系團後方更遙遠、更古老的星系發出的光線通過星系團時,就會被星系團的重力透鏡效應偏折和聚焦,形成而圖中無數弧形的扭曲影像。
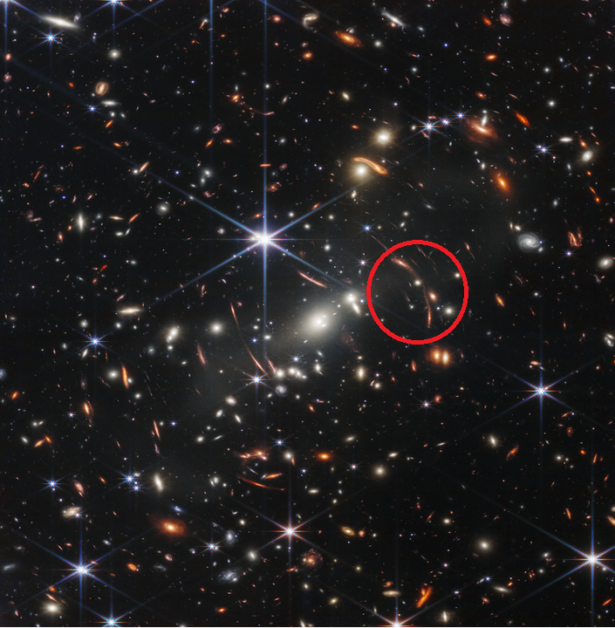
這些仍在襁褓中的小小星系,往往正在快速的孕育新的恆星,或是互相合併,因此有著混沌不規則的形狀。離我們越遠的星體發出的光,需要越長的時間才能到達我們的眼中。因此研究這些遙遠且古老的星系,能幫助天文學家理解宇宙早期的模樣。
2. 星系演化——史蒂芬五重奏(Stephan’s Quintet)
上一張照片讓我們認識星系的起源,這張「史蒂芬五重奏(Stephan’s Quintet)」則可以讓天文學家更仔細地研究星系內的複雜結構,以及星系與星系之間的交互作用。

正如其名,「史蒂芬五重奏(Stephan’s Quintet)」是由五個視覺上相當靠近的星系所組成。但其實最左邊的這個星系(NGC7320)與另外四者並無關聯,只是從地球上看剛好位在天空中差不多的位置而已。
圖片中偏向黃白色,感覺如絲綢般順滑的部分是在近紅外線波段拍攝,主要顯示的是星系中恆星的分布;而醒目的橘紅色,則是來自中紅外波段的資料,展示的是星系中的高溫塵埃,以及星系中的氣體高速對撞時產生的震波(Shock wave)。
除了影像,韋伯還使用光譜儀仔細檢視了影像中右上方的星系(NGC 7319)中心,因為那裏有一顆比太陽重 2400 萬倍的超大質量黑洞,正在吸食周遭的氣體,並在過程中釋放巨大的能量。
藉由觀察光譜的細節,韋伯可以分辨出像是氬離子、氖離子或是氫分子等等化學組成,甚至知道氣體的溫度、運動速度這些從一般照片難以辨識的資訊。
史蒂芬五重奏就像一個天然的實驗場,讓天文學家研究星系演化的詳細過程。
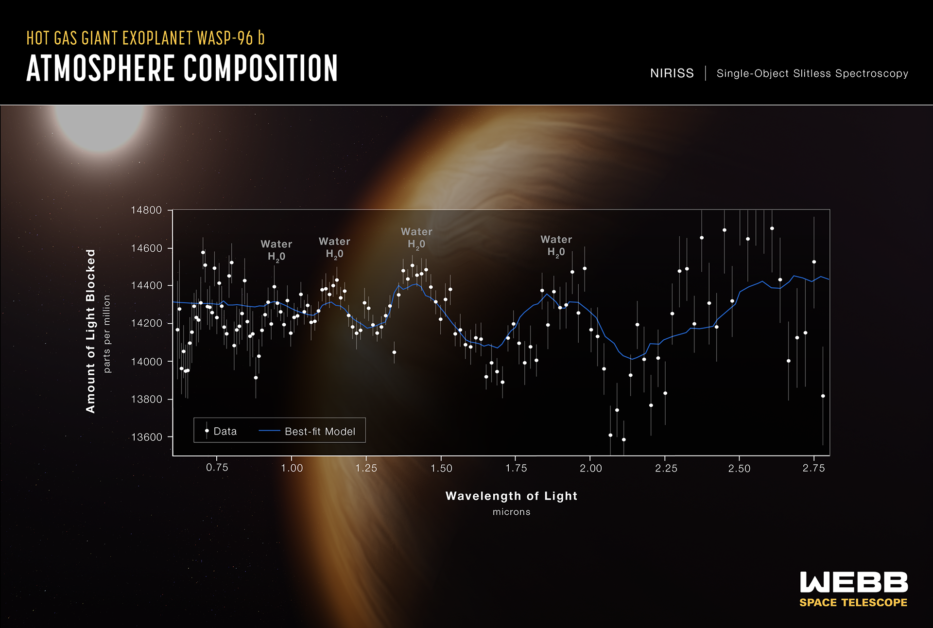
3. 系外行星——WASP-96 b 的大氣光譜
這一張照片可能是整批影像中,視覺上最不起眼的一張,它是系外行星 WASP-96 b 的大氣光譜。
最近 20 多年來,人類對太陽系以外行星的認識越來越多。截至今日,人類已經發現超過 5000 顆系外行星。然而,以現有的觀測技術,天文學家通常只能用一些間接的方法,測量它們的質量、半徑、軌道週期等粗略的特性。想知道這個行星是否適合生命生存,就不能少了行星大氣層的化學組成和溫度資訊。
那要怎麼取得行星的大氣資訊呢?當行星通過恆星跟地球中間時,恆星的一部分星光將會通過行星的大氣層,並被行星的大氣吸收。吸收的多寡和波段,取決於行星大氣層的溫度和化學組成等特性。此時,天文學家就可以藉由分析光譜中的各種特徵,去回推行星大氣層的性質。
圖片中的白點,即是韋伯實際觀測 WASP-96 b 時取得的光譜資訊。而藍色的線,則是天文學家認為最貼合觀測數據的理論模型。
根據這個觀測結果,天文學家計算出 WASP-96 b 的大氣溫度約為 725°C,大氣中明顯有著水氣,並推測可能還有雲和霾存在。未來進一步的分析和觀測,將為世人揭開更多系外行星的神祕面紗。
4. 恆星的生命循環——「南環狀星雲」與「船底座大星雲(Carina)」
最後兩張照片都與恆星的生命循環有關。正如人會有生老病死,恆星也是一樣。
恆星一般誕生在巨大分子雲中,氣體在重力吸引下逐漸塌縮、升溫並點燃核融合,成為一顆恆星。
當小質量的恆星步入晚年,其結構容易變得不穩定,最終將自己的外層氣體拋射出去,形成美麗的行星狀星雲,也將氣體吐回到星際空間中,成為下一代恆星的養分。氣體都拋射完之後留下的核心,就是白矮星。
- 延伸閱讀:宇宙「新」光──新星、超新星與千級新星
各位現在看到的,是暱稱「南環狀星雲」的行星狀星雲,左右兩張圖分別於近紅外線與中紅外線拍攝。
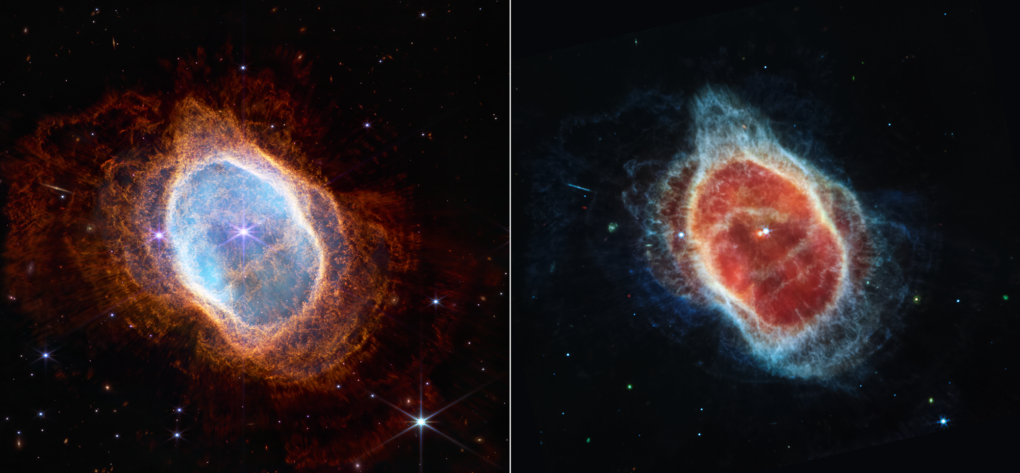
我們可以看到,左圖中的影像比右圖要更清晰一些,這是因為在相同的望遠鏡口徑下,波長越短所能達到的理論解析度就越高。
有趣的是,在左圖中看起來位於星雲中心的明亮恆星,其實並不是行星狀星雲的核心。真正的核心其實是在其左下方,一顆被塵埃包裹著的黯淡白矮星。在近紅外線波段的影像中,這顆白矮星幾乎淹沒在隔壁恆星的炙烈星芒之中。
但在中紅外波段,由於恆星的亮度相對降低,包裹著白矮星的塵埃發出的光就變得清晰可見。再次展示即使是同一個天體,使用不同的波段進行觀測,往往可以看到不同的東西。
最後這片壯麗的宇宙山崖,則是位於「船底座大星雲 Carina」西北角的 NGC3324 恆星形成區。在這裡,源自星雲中無數初生恆星所發出的炙烈輻射、恆星風與噴流,吹散、游離了星雲中原有的濃密氣體與塵埃。交織出這片壯闊而複雜的結構。
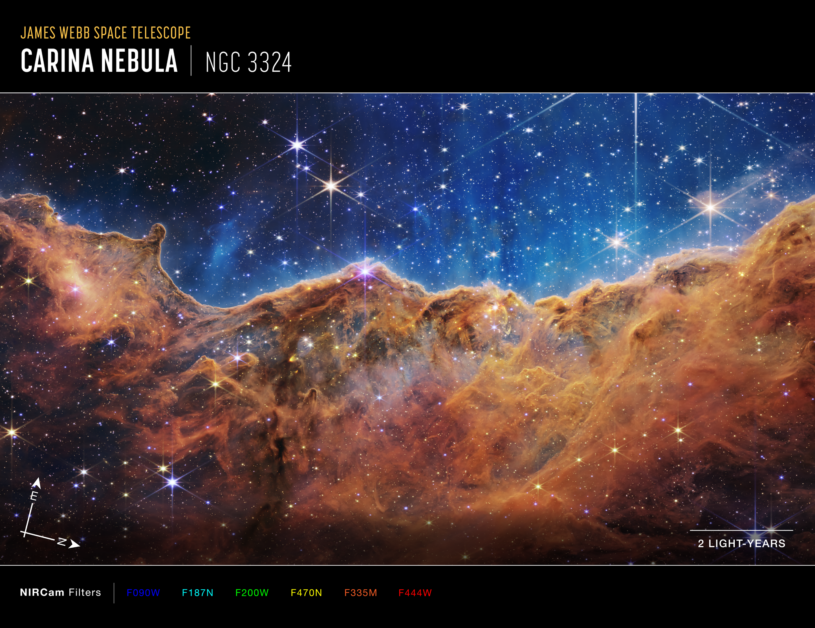
這張照片一共結合了這六個不同的濾鏡的影像拍攝而成。每個濾鏡涵蓋的波段各不相同,代表的物理意義也不一樣。比如(F090W、F200W、F444W)這三個寬帶濾鏡,分別在影像中按照波長順序,以藍色、綠色和紅色這三原色呈現,為照片打下骨幹。而在此之上,照片的製作團隊又疊上青色代表氫原子的(F187N)濾鏡影像,以黃色代表氫分子的(F470N)濾鏡影像,以及用橘色代表甲烷和多環芳香烴的 (F335M) 濾鏡影像,為照片再添更多的細節。
- 延伸閱讀:用黑白相機拍出色彩繽紛的宇宙
想要將這麼多個波段的影像全部結合起來,仔細調整讓細節更加突出,最終呈現出一張如此絢麗又震撼的照片,是非常不容易的。這展示了韋伯太空望遠鏡不僅在科學上相當重要,在藝術上也價值非凡。
最後別忘了,以上只挑選介紹了第一批資料中最具代表性的幾張,更多關於五個目標的照片和光譜,可以在韋伯的官網上找到。而這批照片,又只是韋伯未來二十年服役生涯中,前兩個月的小試牛刀而已。韋伯的時代,才剛剛要開始!







































