

本文轉載自中央研究院研之有物,泛科學為宣傳推廣執行單位。
- 採訪撰文/張容瑱
- 美術設計/林洵安
鳥巢在鳥類演化佔有關鍵地位
如果把全世界的鳥巢放在一起看,會發現什麼有趣的模式呢?中研院生物多樣性研究中心洪志銘副研究員、端木茂甯助研究員與臺灣師範大學生命科學系碩士生方怡婷,統整全世界五千多種鳥巢,推算鳥巢的演化史,發現鳥巢與鳥類的演化歷程息息相關,研究成果刊登在《自然通訊》(Nature Communications),跟著研之有物一起來了解。
鳥巢,鳥類演化求生的關鍵
打從幼稚園開始就是動物「控」的洪志銘,笑說自己「一直長不大」,對動物的喜愛都沒有「進化」。他兒時的志願不是動物園的動物管理員,就是獸醫,年紀漸長才知道,要在野外近距離接觸動物,應該從事生物研究。
正式踏上生物研究後,洪志銘選擇以鳥類為主題,從基因的角度探討鳥類如何適應環境、怎樣演化。他花了大把心力研究鳥類繁殖最重要的工具——鳥巢,因為鳥巢是鳥類延續下去的關鍵之一。洪志銘認為,現在地球的氣候愈來愈極端,鳥類更需要保護蛋和幼雛,鳥巢益發不可或缺。
鳥類築巢行為是否能迅速應付環境的改變,將是決定其繁盛或滅絕的關鍵。
「但研究鳥巢演化的人其實很少,」洪志銘解釋:「一般研究鳥巢通常只選擇幾種鳥種來看,我們是用整個鳥類親緣關係樹來做研究,才能全面地了解鳥巢的演化。」

鳥巢七十二變,怎麼看門道?
但鳥巢種類千變萬化,要從哪裡著手?鳥類築巢是非常複雜的行為,先要選擇適當的位置、收集材料,再堆疊或編織成巢。從巢位、巢材,到築巢的方法、巢的外型結構等等,變化很大,可說是有多少種鳥,就有多少種鳥巢!
最後,洪志銘的團隊選擇了鳥巢的外型結構、所在位置、附著方式三個特徵,分析它們如何隨著時間逐漸變化。
「這三個特徵的資料是最齊全的,也容易分類,」洪志銘解釋:「比方說,巢材雖然也很重要,但變化太大,同一種鳥在臺灣用某種草築巢,在菲律賓用的是另一種草,很難歸類,也不容易有完整的資料。」
研究人員查閱《世界鳥類圖鑑》(the Handbook of Birds of the World Alive,HBW)線上版,統整全世界 242 科 5000 多個鳥巢描述;獲取各科鳥類巢的特徵之後,再利用電腦程式,沿著已知鳥類親緣關係樹,回推追溯各科的鳥祖先築的巢是什麼樣子,慢慢建構出鳥巢的演化史。
巢型,來自基因的呼喚
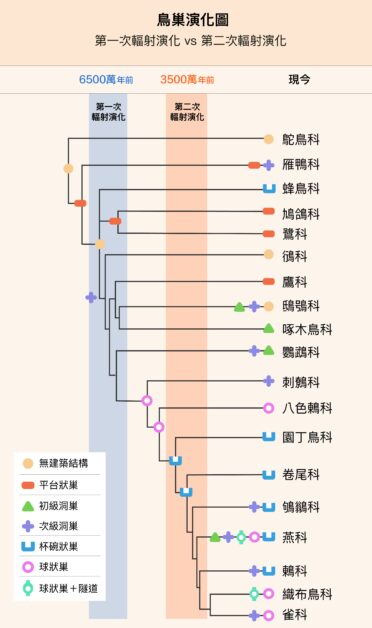
第一個特徵是巢型,主要可分為:無結構、平臺狀、杯碗狀、球狀、球狀加隧道,以及樹洞或土洞等洞巢。
無結構巢是最簡單的巢型,不具有建築構造,鳥直接把蛋下在地面、峭壁或樹枝上,或是用身體、腳在地面刮擦、蹭出一個淺坑,再下蛋於其中。杯碗狀的巢是大家最熟悉的巢型,白頭翁、綠繡眼、家燕的鳥巢,中南部的赤腰燕則是球狀巢附帶長長的隧道。洞巢又可分為兩種,自己挖洞築巢的,例如啄木鳥、五色鳥、翠鳥的巢,屬於「初級洞巢」,像貓頭鷹、鴛鴦、犀鳥等等,使用天然樹洞或其他動物挖鑿的洞穴,稱為「次級洞巢」。

圖│iStock
結果發現,巢型的演化大致上是從簡單到複雜:先是沒有結構的無結構巢,發展出堆疊巢材的平臺狀巢,之後是利用天然的洞穴、自己鑿洞,然後是球狀和杯碗狀巢。但也有例外,比如現在最常見的杯碗狀巢,在鳥類演化較早期就曾在特定類群出現過。
再者,鳥的親緣關係愈近,築的巢型愈相似,表示巢的外型結構主要由與生俱來的基因決定。「如果在野外撿到鳥巢,從外型結構大致可以準確判斷是哪類鳥的傑作。」洪志銘說明。
巢位、附著方式,容易受外在影響
再來是巢位 (所在位置),鳥類選擇築巢的位置非常多樣,包括:地上、樹上、非喬木植物、峭壁、河岸等等。鳥類的共同祖先起初是地上孵蛋育雛,接著到樹上築巢,這也是最常見的巢位,大約三分之二的鳥類把巢築在樹上。不過洪志銘分析資料顯示,巢位的變化與基因、親緣關係較不相關,比較容易受到捕食壓力、種間或種內的競爭等外在環境因素影響。

圖│iStock
最後是鳥巢的附著方式,分成底部支撐、水平分叉固定、側掛和垂吊四種,底部支撐是最常見的,也是最早演化出來的。研究也發現,在本次分析的三種鳥巢特徵中,附著方式與鳥類的親緣關係最不相關。

圖│研之有物
值得注意的是,雖然外型結構、所在位置和附著方式的演化並不同步,卻會相互影響。舉例來說,平臺狀巢或洞巢發展出來之後,鳥類才離開地面,開始在水面或河岸等新的地點築巢;杯碗狀巢或球狀巢出現之後,巢位才擴展到草叢、藤蔓等非喬木植物;杯碗狀巢、球狀巢則和側掛、垂吊等「非底部支撐」的附著方式有著緊密的演化關聯性……構成千變萬化的鳥巢。
輻射適應事件,造就當今鳥類多樣性
這次研究也發現,鳥巢的演化與兩次鳥類輻射適應事件相關。洪志銘解釋說,鳥類輻射適應有兩次,第一次大約在六千五百萬年前,也就是 K-Pg 界線,恐龍滅絕後,鳥類在很短的時間內擴展出很多類群,從僅存的單一個類群「今鳥類」分化出鴕鳥、雞、鴨、啄木鳥等各種鳥類。第二次輻射適應大約在三千萬至四千萬年前,麻雀、燕子、白頭翁、綠繡眼、八哥等雀形目的鳥大量分化出來。現今,雀形目大約占了所有鳥類的百分之六十。
這兩次輻射適應事件,造就了現今地球擁有上萬種的鳥類。洪志銘比喻說:「就像你跑到一座居民撤離後的城市,房子都空了,你愛住哪兒,就住哪兒。」K-Pg 界線時,恐龍和許多鳥類類群都滅絕了,地球上空出很多生存的空間,也就是所謂的「生態區位」,今鳥類便分化出各式各樣的體型、大小、嘴喙等,以占領不同的區位。
至於第二次鳥類輻射適應的發生,目前還不確定原因,洪志銘認為可能與植物多樣性增加有關,因為高高低低、形形色色的植物出現,環境層次變多,生態區位也變多了,促使雀形目大量分化。
第一次鳥類輻射適應,分化出非雀形目的不同類群,搶占恐龍滅絕後空出來的生態區位。第二次鳥類輻射適應,則是雀形目鳥類大量分化出不同類群。
以鳥巢的外型結構來看,巢型的大量變化與第一次輻射適應的時間點相符:巢型原本只有無結構巢,大約在第一次輻射適應時,出現了平臺狀巢、杯碗狀巢和洞巢等不同結構的巢型。
第二次輻射適應事件主要是演化出雀形目的鳥類,可以構築結構更為複雜的巢,並發展不同的附著方式,進而利用新的築巢位置,附著方式和巢位這兩個特徵的多樣化也與第二次輻射適應事件相符。
本次研究雖然是在電腦上作業,洪志銘也花很多時間在實驗室做基因研究,但回到生物學家的初衷,他最愛的還是野外近距離觀察生物。
「做生物研究,還是要回到生物本身。基因的變化會在生物身上變化,如果看到基因有意義的變化,很可能是適應環境的結果。」洪志銘的研究團隊還會在鳥類適應環境的過程中,發掘出什麼有趣的模式呢?一起拭目以待!
延伸閱讀
- Fang, YT., Tuanmu, MN. & Hung, CM. Asynchronous evolution of interdependent nest characters across the avian phylogeny. Nat Commun 9, 1863 (2018).
- 鳥巢也會演化,方怡婷撰文,《科學人》雜誌,2019 年 1 月號第 203 期第 84-90 頁
- 洪志銘的個人網頁






































