本文為系列文章,上一篇請見:邁向商用化——電腦產業的形成│《電腦簡史》數位時代(十五)
真空管的先天缺陷:易報銷
二次大戰後,電腦全面使用真空管後,速度大幅提升,隨著需要大量計算的企業越來越多,電腦前景看似一片光明。不過當電腦上線運作後,真空管的先天缺陷終於曝露出來,嚴重阻礙電腦產業的發展。
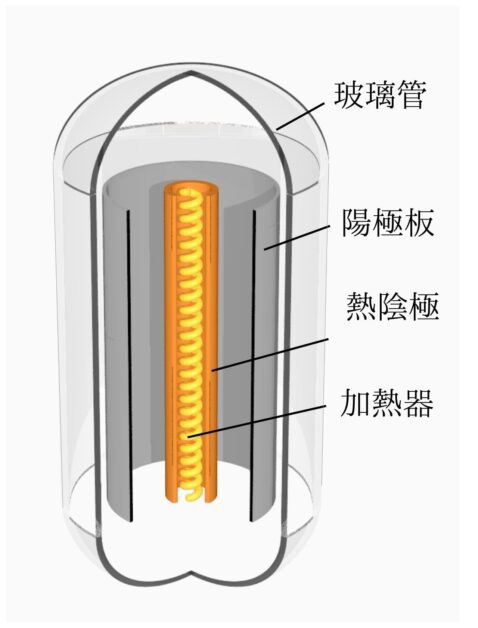
真空管是靠加熱極細的燈絲而產生游離電子,電子被吸引至做為正極的金屬片而產生單向電流。由於燈絲與電極都會逐漸耗損,真空管的壽命原本就不長;即使是特別為電腦生產的真空管,在正常狀況下也不過能用兩千個小時。更何況在進行高速運算時,真空管不斷開開關關,燈絲很容易因此燒斷而提早報銷。
一部電腦至少有幾千個真空管,只要有一、二個壞掉,就會影響整體電路的運作。以 UNIVAC 為例,平均故障間隔 (MTBF, Mean Time Between Failures) 的時間不超過 24 小時;美軍的 ENIAC 用的真空管超過一萬七千個,MTBF 更是只有 12 小時。而一旦發生問題,要排除故障也相當耗費時間,平均得花幾個小時才能找出損壞的真空管,予以更換。
電腦如果動不動就得停機檢修,不僅效益大打折扣,還會影響正常作業,誰想花大錢購置電腦卻惹來內部抱怨連連。可靠性的問題沒有解決,電腦就難以獲得全面採用,只是真空管的物理特性就是如此,能再改善的空間有限,只能期待全新的電子元件出現。
如今我們知道,這革命性的電子元件就是電晶體。它不僅解決了可靠性的問題,而且大幅降低成本、縮小體積、提升速度,讓電腦改頭換面,並催生出各種電子產品,人類文明從此邁入新紀元。電晶體之所以能帶來革命性的改變,乃因它是奠基於一種革命性的材料——半導體。要知道電晶體如何發明,得先知道什麼是半導體。
半導電性:導體與絕緣體之間
顧名思義,半導體就是具有半導電性的物體。但何謂半導電性?
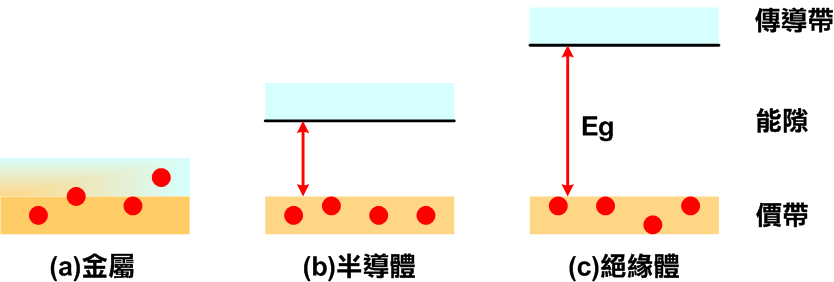
我們知道不同元素有不同電子數,以原子核為核心,由內而外分布於不同殼層。越外層的電子能量越高,其中最外層的電子稱為「價電子 」,所處的能階稱為「價帶 」。價電子仍被束縛在原子內,所以無法導電,必須獲得能量躍遷到「傳導帶 」才能導電。傳導帶與價帶的能量差距稱為「能隙 」,導電性便取決於能隙的大小。
金屬的能隙非常小,甚至傳導帶與價帶有部分重疊,所以導電性很高;反之,絕緣體的能隙很大,價電子無法跨越,因此無法導電。半導電的能隙則介於金屬與絕緣體之間。
能隙的大小與價電子的個數有關。每個殼層可容納的電子數都有上限,當價電子殼層越接近填滿狀態,就越穩定,需要越多能量才能激發價電子跳到傳導帶;當價電子越少,就越容易脫離束縛,跑到傳導帶。
金屬的價電子通常不超過 3 個(過渡金屬除外),很容易形成自由電子,到處移動。絕緣體通常有 5 個或以上的價電子。碳、矽、鍺、錫、鉛等 IV 族元素有 4 個價電子,剛好是半滿狀態,導電性介於導體與絕緣體之間,屬於半導體。
IV 族元素如果摻雜其它元素,導電性也會跟著改變。例如把磷摻到矽裡面,因為磷有 5 個價電子,其中 4 個與矽共用後,還多一個價電子,就更容易跑到傳導帶成為自由電子,這種半導體稱為 n 型 (n 代表 negative)。
矽如果摻的是有三個價電子的硼,只差一個價電子就是最穩定的狀態,猶如有個「電洞」讓經過的電子落入陷阱。旁邊的電子掉進這個電洞後又產生一個新的電洞,形成骨牌效應,從另一個角度看,就像是帶正電的電洞會移動一樣,因此稱為 p 型半導體 (p 代表 positive)。
偶然發現半導體
除了摻雜,化合物也可能形成半導體。半導體最早被發現,就是與 IV 族元素無關的化合物。1833 年,法拉第有一次在做電力實驗時,無意間將燈火靠近硫化銀,結果發現導電能力竟然大增;一旦移走燈火,導電性又隨著溫度下降而降低。一般金屬在高溫時,導電性會變差,硫化銀卻剛好相反,令法拉第大感訝異。
硫化銀就是一種半導體。高溫之所以增加半導體的導電性,是因為熱能會讓更多價電子躍遷到傳導帶,因此增加了導電性。一般金屬原本僅需一點能量就能產生自由電子,集體往正極方向移動。但電子如果吸收太多熱能,反而四處亂竄,原本的定向性受到破壞,導電能力也就隨之下降了。
法拉第雖然發現半導體這個特性,卻無法了解其中原理。畢竟當時距離道爾吞提出原子說還不到 30 年,是否有所謂的基本粒子仍頗受質疑,更無從想像原子內部還有電子與原子核。因此法拉第發表這個奇特的現象後,就不了了之,也沒有人想到在導體與絕緣體之外,還有一種半導體。下次半導體再度躍上檯面,已是四十年之後。
1874 年,才 24 歲的德國物理學家布勞恩 (Ferdinand Braun) 在研究各種硫化物的導電性時,將硫化鉛接上電,卻發現檢流計的指針紋風不動。他試著調換正負極,結果指針馬上就有反應。這實在太奇怪了,一個物體的導電性應該是一致的,怎麼會因為正負極不同接法,一下是絕緣體,一下又是導體?
單向導電性 是半導體另一項重要特性。硫有 6 個價電子,所以硫化鉛是 n 型半導體,一般情況下,電子只能從硫化鉛往正極移動,才會從另一個方向測不到電流。同樣地,由於當時仍然不清楚原子的構造(湯姆森於 1897 年才發現電子),不知如何解釋這個奇特現象。
大家毫無頭緒,單向導電性又看不出有何用途,因此布勞恩發表實驗結果後,並沒有激起任何漣漪。半導體再次受到忽視,要等到赫茲於 1888 年發表無線電波的實驗後,硫化鉛這類的半導體礦石才引起大家的興趣。
接收無線電波
赫茲的實驗吸引很多人投入無線電波的研究,印度科學家博斯 (Jagadish Chandra Bose) 也是其中之一。他發現 IV 族元素的礦石不但有單向導電性,而且不遵守歐姆定律:電流與電壓成正比。當施予礦石的電壓小於某個臨界值時,電流微乎其微;一但超過臨界電壓,電流便突然大幅增加。
博斯想到可以利用這個特性偵測微弱的無線電波。只要先對接收裝置施以適當電壓,讓無線電波所產生的感應電壓恰好超過臨界電壓,電流便會出現明顯變化,就能如實呈現無線電波。
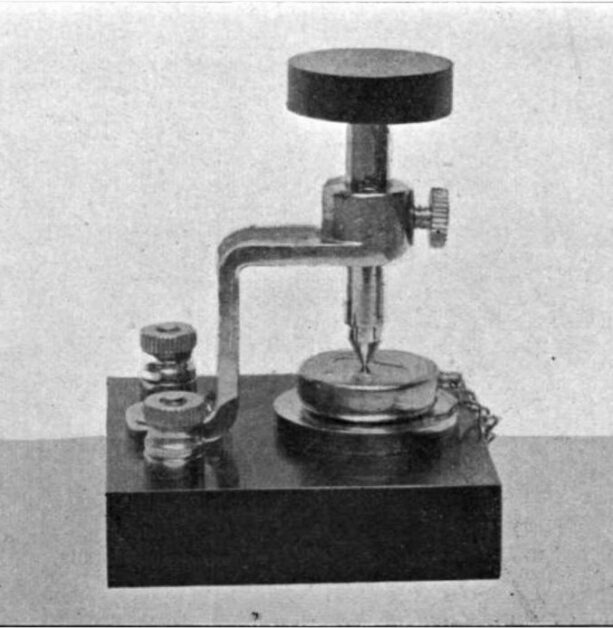
1894 年,博斯將金屬天線的一端與硫化鉛的表面接觸,做成無線電偵測器(也稱「檢波器」),成功接收到一英哩之外的無線電波,這中間還隔了三道磚牆。
馬可尼 (Guglielmo Marconi) 也在這一年發明無線電報系統,兩年後他和博斯在倫敦會面,不過博斯對商業應用不感興趣,並未與馬可尼合作。馬可尼也沒有採用博斯這個技術,而是利用感應電流產生的磁場變化,來吸引金屬屑或發出聲響,作為判斷電波的依據。
事實上,博斯自己後來也改用別種技術設計檢波器,因為礦石檢波器的確不是很靈光。礦石中的雜質分布並不均勻,不是每次用金屬線接觸硫化鉛表面都能形成迴路,往往得嘗試很多次才能找到「熱點」,得到訊號。
儘管如此,AT&T 的工程師匹卡德 (Greenleaf Pickard) 仍看好礦石檢波器的潛力,試圖找出收訊效果更好的礦石。
1902 年,匹卡德檢測一塊礦石的熱點時,懷疑施加的電流造成背景雜訊太大,於是伸手拿掉部分電池,結果雜訊果然馬上消失,無線電的訊號變得清楚許多。這時他看了一眼器材,才發現他剛剛不小心把電池的接線弄掉了,也就是礦石檢波器竟然不需要電,就可以接收無線電。
這個奇妙的現象完全違背過去的認知,於是匹卡德更加專心研究還有哪些礦石不用電就可以當檢波器。他花了三、四年的時間測試上千種礦石,發現有 250 種可以做為天然檢波器,其中又以熔融後的矽(原本用來製造石英玻璃)收訊效果最佳。
礦石收音機
匹卡德進行實驗的這段期間,無線電也正在發展另一項應用:傳送聲音。當時電話已是成熟的技術,可以將聲音轉換為音頻訊號,但音頻是連續波形,無線電波卻是脈衝電波,因此只能靠長/短、有/無來代表摩斯密碼,無法傳送音頻訊號。
1900 年,加拿大發明家范信達 (Reginald Fessenden) 發明一種高速交流發電機,終於能產生連續波形的無線電波(稱為「載波」,波形為規律的正弦波)。
原本規律的載波與音頻疊加後,變成起伏變化的無線電波,電波的振幅大小便代表音訊的變化。這種調變電波振幅的技術便稱為「調幅」(Amplitude Modulation, 簡稱AM),就是現在 AM 廣播所用的技術。
調幅示意圖。圖:Wikipedia 調幅無線電到了接收端,還得經過「解調」才能還原成原來的音訊。首先,由於天線接收無線電波後,所產生的感應電流也是交流電,因此必須先把反方向的電流去掉,成為單一方向的直流電;這個步驟便稱為「整流 」。接著再濾掉其中的載波,留下的就是原來的音頻訊號。
范信達直到 1904 年才成功做出有整流功能的檢波器,並於 1906 年的聖誕夜成功發送 AM 廣播到大西洋上的美國軍艦。不過范信達所發明的檢波器不易製造,又常需要調校,只適合專業人士使用。而半導體的單向導電性恰好可以將交流電整流為直流電,這類礦石便可直接做為無線廣播的檢波器。
1906 年,匹卡德獲得矽石檢波器的專利,並在隔年創立公司,製造用耳機收聽的礦石收音機,銷售給一般大眾。由於價格低廉、體積小巧又不需要電,因此頗受歡迎。礦石收音機成為史上第一個半導體商品;誰會想到如今半導體與各種電子產品密不可分,但最早卻是以不用電為訴求。
三極真空管橫空出世
就在匹卡德於 1906 年申請專利這一年,美國專利局也收到另一項影響更深遠的專利申請,那就是由德佛瑞斯特 (Lee De Forest) 改良的新型真空管。
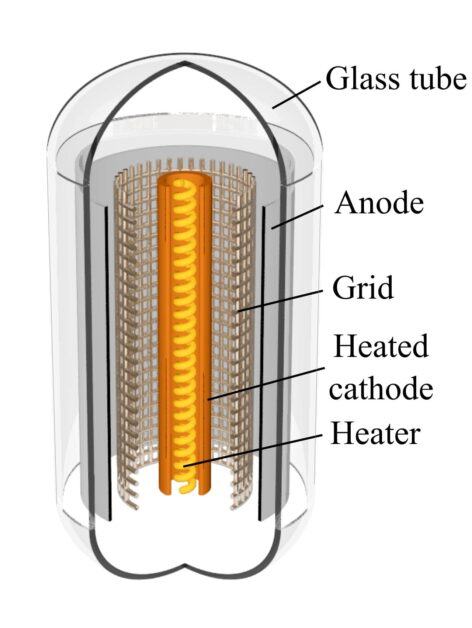
原本弗萊明 (John A. Fleming) 於1904 年發明的真空管只有正負兩極,德佛瑞斯特用金屬柵格擋在金屬片與燈絲之間,變成除了正、負極,還多了「柵極」(Grid) 的三極管 。
柵極用來控制電流大小。當柵極施以負電壓,產生的電場與電子相斥,部分電子便被擋下,無法抵達正極金屬片,電流也就變小了。負電壓越大,被擋下的電子越多,電流也就越小;柵極就像家裡的水龍頭,不用動到水管的閥門,就可以各自調節水流大小。
德佛瑞斯特原本設計三極管只是為了調節電流,他沒想到六年之後,這項設計竟被發掘出放大訊號的功能。
原本只有二極管時,若要調整電流大小,正極電壓就要有相對幅度的改變,就如前面水管的比喻,沒有水龍頭的話,只能從源頭閥門控制水量。例如要讓電流從 12 mA 減半降為 6 mA,電壓要從 110 V 降到 60 V;但若使用三極管,則無須改變正極電壓,只要對柵極施以 -2 V 的電壓就可以了。
三級管的電壓變化只需二級管的 1/25 ,便能達到同樣的效果(若搭配適當的阻抗,相差還能到百倍以上),就像水龍頭那樣,轉動一點點,出水量就差很多。如果讓柵極做為訊號的輸入端,正極做為輸出端,那麼原本微弱的訊號,就會放大成強烈的訊號。
有了三極管做為訊號放大器,無線電可以傳得更遠,收訊效果也更好,而且收音機還可以配上喇叭。隨著廣播電台自 1920 年代開始快速發展,真空管收音機也進入一般家庭,成為民眾重要的休閒娛樂與資訊來源。相對地,礦石收音機的收訊效果與方便性都遠遠不如,自然不受青睞,逐漸沒落。好不容易找到舞台的半導體於是又被棄置一旁,沒想到十幾年後,同樣是由來自 AT&T 的工程師,再度讓半導體起死回生。
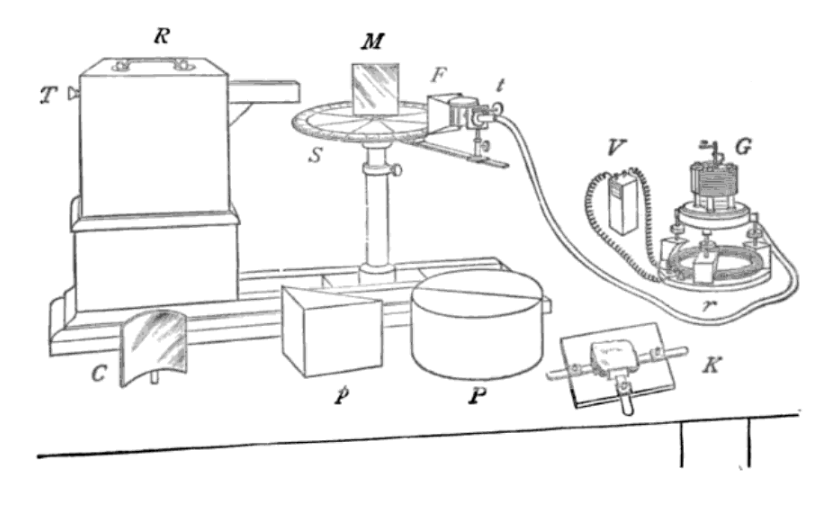
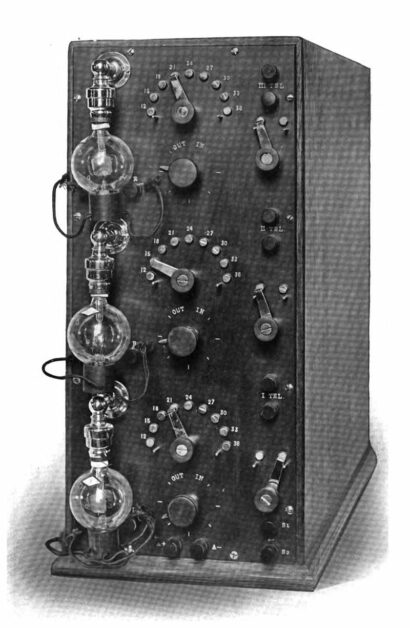
德佛瑞斯特於1914年用三極管打造的訊號放大器。圖:Wikipedia 真空管搞不定短波
三極真空管有助於無線廣播,當然也有助於電話傳得更遠。 AT&T 利用真空管擴大電話網路,於 1915 年開通橫跨東西兩岸的長途電話。1927 年 1 月 7 日, AT&T 總裁進一步透過無線電波,從紐約打電話到倫敦,完成史上第一通越洋電話。不過這通電話只是試驗性質,真要提供越洋電話服務,還有項技術問題須要克服。
紐約與倫敦相隔甚遠,無線電波無法橫越地表弧度直接送達,必須經大氣的電離層反射到地面。然而一年四季、晴雨晨昏,大氣條件都不一樣,對電波的影響也大不相同。因此若要維持越洋電話全年暢通,通訊設備須要能夠收發不同波長的無線電波。不過真空管在高頻(也就是短波)的表現不是很好,如何克服這個問題便成為貝爾實驗室的首要任務。
貝爾實驗室於 1925 年成立,初期的工程師大多從 AT&T 陸續轉調過來,歐偉 (Russell Ohl) 也是其中之一,他對無線電的興趣始自大學時期。1914 年第一次世界大戰爆發,當時大學二年級的歐偉,在課堂上第一次聽到礦石收音機發出聲音,而且竟然是遠在大西洋的英國船隻,遭到德國潛艇攻擊所發出的求救訊號,從此他便對無線電深深著迷。
歐偉原本在 AT&T 就是負責短波的研發,1927 年轉到貝爾實驗室後仍繼續這個項目。他們不斷將無線電電波推向更高的頻率,但最終遇到瓶頸難以跨越。當其他同事仍執著於真空管時,歐偉於 1935 年決定從頭開始,一一檢視過去無線電的各種實驗與論文,從中發掘可行方案。最後他把目標瞄準礦石收音機的矽石,相信這才是解答。
一道裂痕開啟「矽」的半導體時代
礦石收音機不是才被真空管淘汰嗎?同事與主管都認為歐偉異想天開,但他認為只要去除矽石中的雜質,就能收發頻率更高的無線電波。歐偉自己多次嘗試用矽粉製造,卻不得其果,最後終於在 1939 年找到具有冶金專長的同事,用高溫熔製的方法精煉出高純度的矽。
1940 年 2 月 23 日,歐偉決定檢測一塊去年製出的矽石,據他的同事說,這塊矽石相當奇特,每次測的導電性都不一樣。歐偉仔細檢查這塊矽石,發現中間有條裂痕,他猜想這就是導電性不一致的原因,原本不以為意。但他接上示波器,赫然發現矽石在檯燈的照射下,竟然會產生電流。
光電效應是會產生電流,但那是以紫外線照射金屬,而這顆 40 W 的燈泡發出的是可見光,矽的導電性也遠遠不如金屬。雖然美國發明家弗里茲 (Charles Fritts) 曾於 1884 年將硒鍍上金箔,做成太陽能電池,但這樣的光伏效應 (Photovoltaic effect,也稱「光生伏特效應」) 轉換效率非常低,只有 1% 左右。歐偉所測到的電壓,超過當時所知的光電效應與光伏效應十倍以上,絕對是項前所未有的發現。
歐偉趕緊找主管來看,同時和同事繼續深入研究這塊矽石。他們發現電流總是由裂痕的上半部流往下半部,而不會反向而行。經過進一步分析發現,裂痕兩邊含有不同的雜質,上半部含有少許的硼,而下半部的雜質則是磷。
他們推測應該是這塊矽石經過高溫熔化,在自然冷卻的過程中,較重的磷下沉得比較快,較輕的硼下沉得比較慢,裂痕出現的地方剛好將這兩種元素阻隔開,以致矽石的上、下半部各有不同的雜質。
歐偉推測電流就是兩邊不同的雜質所致。磷有 5 個價電子,而硼有 3 個價電子,在白熾燈泡的照射下,磷的多餘電子被激發而越過裂痕,填補含硼那一邊矽石的電洞,而產生電流。這就類似電池的負極提供電子給正極,於是歐偉也用「n型」、「p型」來稱呼這兩種矽石,然後把劃分兩邊的裂痕——也就是這兩種半導體的接觸面——叫做「p-n 接面」(p-n junction)。這幾個名稱便一直沿用到現今的半導體。
半體體的基本名稱不但源自歐偉的命名,如今我們懂得利用摻雜來改變半導體的導電性,也是始自他這次的發現。不過對歐偉而言,他一心只想研究無線電波,發現半導體的光伏效應只是偶然,他無意也沒有能力再深究其中原理。
半導體的後續研究隨即由貝爾實驗室另一個團隊接手,這群有量子力學背景的物理學家將釐清 p-n 接面的奧秘,進而發明改變世界的電晶體。












































{kind=link}
{kind=link}
.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}