- 撰文/劉詠鯤
本文轉載自 CASE 科學報《黑洞旅行團,出發!(上)——彎曲的光與重力透鏡》
在嚴峻的疫情下,雖然我們無法親自外出旅遊,但是想像力可不會被輕易束縛。今天讓我們一起前往廣袤的宇宙中,在那裡散布著無數龐大的天體,它們扭曲從旁擦身而過的光線,形成各式獨特的景象。在本篇文章中,我們將帶領各位讀者一起了解光線是如何被彎曲。
電影《星際效應》中,一幅令人印象深刻的畫面是主角們乘著太空梭在黑洞附近時,所看到的黑洞景象(如圖一)。但是以人類目前的太空實力,尚無法脫離太陽系,抵達巨型黑洞附近更是無法實現。那這幅景象只是純粹虛構的嗎?並不是,它是藉由物理理論將我們的認知延伸到遙遠的宇宙彼端,讓我們也有能力推測,遙遠的未來,黑洞旅行團會看到的景象!

黑洞附近獨特景象的原因,是因為它極為龐大的重力。因此,在討論黑洞景象之前,我們要先來認識描述重力的理論,那便是鼎鼎有名的廣義相對論。廣義相對論使得人們有能力理解宇宙中發生的各種現象,其中一個重要的洞見是:「重力的本質是時空的彎曲」。這句話看起來十分抽象,以下我們舉個例子試著讓各位讀者體會,力與時空彎曲這兩件看來毫無相關的事情是如何扯上關係的。
力與彎曲空間
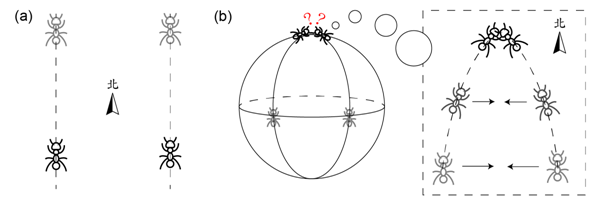
假設有兩位螞蟻探險家,在他們眼中,地球是一個巨大的平面。有一天,他們相約從赤道上兩個不同的位置出發,拿著指北針,約好一起向正北方,以相同速度前進。在他們心中,地球是一個平面,因此兩人同時向北走,路徑會互相平行,應該永遠不會相遇(圖二a)。但經過了數個月,他們在北極點碰到了彼此,感到驚訝無比。為了解釋此結果,他們推斷:「由於地球是平的,我們會碰在一起,代表我們之間有某種吸引力,將我們越拉越近(圖二b)」。但是我們站在第三人稱的視角便會明白,他們倆最後會碰在一起,並非因為彼此之間有吸引力,而是他們所在的地球是個曲面而非平面。力與空間的彎曲似乎沒有我們想像的那麼毫無關係!
愛因斯坦偉大的洞見,便是他了解到:我們時刻感受到的重力,其實本質上是具有質量的物體造成附近時空的彎曲;我們因為認為時空是平坦的,因此把他詮釋為一種「力」,就如同兩位螞蟻探險家。細心的讀者可能留意到,我們在此使用了「時空」,而非「空間」。相對論中,時間與空間不再互相獨立,而可以互相影響。
讀者可能會疑惑:重力是一種力或是時空的彎曲,這聽起來只是詮釋角度的不同,有實質上的差別嗎?其中一個主要的差別在於對「光」的影響。古典描述重力的理論:牛頓力學,對於光通過一個大質量天體附近時,路徑會如何改變的預測,和廣義相對論的結果並不一致。1919 年,艾丁頓爵士在日蝕發生時,向太陽的方向觀測,發現竟然能夠看到理應被太陽擋住的星光。其原因便是太陽的重力造成附近的時空彎曲,遙遠的星光在通過該區域時發生路徑的偏折,使我們有機會在地球上看到它。
一個物體附近時空彎曲的程度,會和其質量大小有關。因此當光線通過愈大質量的天體附近時,路徑的改變就會越大。這個效果就如同光線通過一個透鏡時會發生偏折(如圖三)。天文學中,人們會使用由透鏡、反射鏡等組成的望遠鏡來觀察遙遠的天體。那我們是否可以使用這些天體形成的「透鏡」,來觀察宇宙呢?答案是肯定的,這便是在當前天文與宇宙學領域中,一個正蓬勃發展的觀測方式:重力透鏡。

重力透鏡
根據光線彎曲的程度(也代表著透鏡天體的質量大小),重力透鏡可以被分為:微重力透鏡、弱重力透鏡以及強重力透鏡。其中強重力透鏡,由於光線的彎曲程度較大,在地球上的觀察者可以看到十分有趣的圖像。例如愛因斯坦十字、愛因斯坦環。對此議題有興趣的讀者,可以參考[3],該文章有深入淺出的解釋。
由於光線偏折的程度,與通過的天體質量有關。因此,如果我們對於光源的性質十分了解,重力透鏡可以反過來提供給我們透鏡天體的質量資訊。這特別適合拿來進行暗物質的分布量測。由於暗物質只透過重力和其他物質作用,它並不會放出任何的電磁波,要「看」到它,只能透過重力的效應。若是我們在宇宙中,發現某一個區域具有非常大的質量,造成通過的光軌跡有所偏移,但是我們又無法在該區域中,利用各種電磁波望遠鏡,看到可識別的天體,那很可能那裏有緻密的暗物質;再透過分析光線的彎曲情形,科學家們便可以推測出其中的暗物質質量分布。
在本篇文章中,我們向各位讀者介紹了光是如何受到重力的彎曲,以及相關的應用。這個效應在黑洞附近會更為劇烈,在下一篇文章中,我們將會介紹該如何「模擬」黑洞附近的景象。
延伸閱讀
本系列文章:
黑洞為什麼不黑?彎曲的光與重力透鏡——黑洞旅行團,出發!(上)
巨大的黑洞反而不危險?——黑洞旅行團,出發!(中)
怎麼模擬出真實的黑洞樣貌?光線追蹤技術——黑洞旅行團,出發!(下)
參考資料
- [1] 廣義相對論之鏡─重力透鏡
- [2] Wiki-Gravitational lens
- [3]人類也能擁有上帝視角,宇宙中的天然放大鏡:重力透鏡