- 作者/卓瓊鈺(國立成功大學物理治療學系副教授)
電腦族的酸痛煩惱
現代人因為長時間使用電腦,常會發生頸肩及上肢酸痛等症狀。造成這些症狀的危險因子包括物理、心理、或是個人特質等因素。大部份的研究著重在物理因子的探討,包括肢體使用的頻繁度、力量、工作時的姿勢等。
雖然,近年來有學者也發展出一些心理學模式來解釋壓力是造成這些骨骼肌肉系統症狀的成因,但較少有實驗能直接證明這些症狀是心理壓力造成的。

辦公室的白領階級因為長期久坐使用電腦,骨骼肌肉系統症狀普及率相當高,症狀分布的範圍亦廣,這跟從事的工作特色以及常使用的部位有關 (Fine, 1996)。
根據先前一篇大規模的調查指出,臺灣的骨骼肌肉系統症狀普及率高達 37% (Guo, 2004),但其研究範圍並不侷限於電腦族。針對白領階級,筆者 (Cho, 2012) 先前針對上班族所做的調查顯示,電腦族的骨骼肌肉系統症狀好發部位前三名分別為肩 73%、頸 71%、以及上背 60%,如此高的普及率,可見這些酸痛問題的確會造成上班族的困擾。
肌肉酸痛症男女有別
因為外型以及荷爾蒙等因素,女性較男性容易發生骨骼肌肉系統之累積性傷害。可能的原因除了傳統女性角色以操持家務相夫教子為主外,亦有研究指出女性較容易從事高重覆性的工作 (Bernard et al. 1997)。
然而,隨著女性人力投入職場的增多,女性操持家務的比例並沒有相對減少,如果再加上工作的壓力,女性的酸痛困擾應是有增無減。國外研究顯示,上班族女性發生頸肩症狀的比例幾乎是男性的兩倍 (Cagnie, 2007)。
打電腦姿勢男女有別
為了瞭解男女電腦族使用電腦時的姿勢與肌肉控制情形有何不同,我們研究室(成功大學醫學院物理治療學系姿勢與平衡研究室)登報徵求主訴骨骼肌肉系統症狀的電腦使用者,接著我們利用多面向的評估方式:包括骨骼肌肉症狀以及心理壓力的問卷調查、人體工學的問卷調查、以及三度空間立體攝影來作姿勢評估,並以肌電圖分析從事電腦工作時肌肉的收縮情形。
研究結果發現,在從事一段時間的電腦工作之後,男女的姿勢以及肌電圖變化的確有明顯的不同。女生的骨骼肌肉系統症狀分數以及發生頻率皆較男生為高。
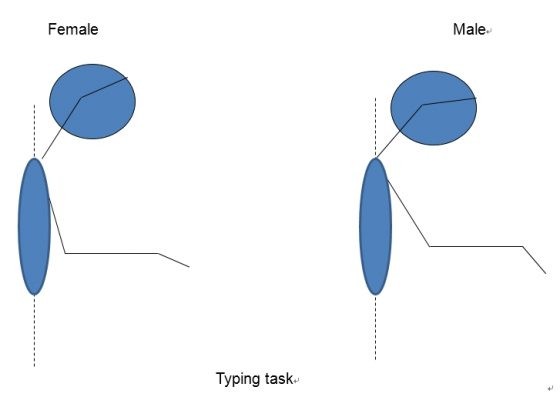
在從事打字作業時,男女的頭、頸彎曲角度有明顯的差異,男生採取比女生大的頭頸彎曲角度。而在從事滑鼠作業時,男生的肩部、肘部彎曲以及手腕橈側彎曲的角度都比女性來的大。而在肌電圖的分析方面,只有右側的手部伸指肌有明顯的性別差異,女生會使用較高強度的肌肉力量來從事電腦工作。
此外,電腦族會因為使用電腦時間的增加或打字速度的變快而增加頭頸彎曲的角度,但卻減少了上肢彎曲的角度,同時只有右側伸指肌的肌電圖肌肉活性會有明顯改變。
而即使在調整過的工作環境,桌椅都已經配合身高調整,打字時男生還是採取比女生大的頭頸彎曲角度;在操作滑鼠時,男生則是使用比較大的肩肘彎曲以及橈側(手腕關節)屈曲角度。另一方面,女生在從事電腦工作時則使用較高比例的手部肌肉力量 (Yang and Cho, 2012)。
給電腦族的酸痛解方!
導致電腦族發生骨骼肌肉系統症狀常見的危險因素包括高重覆性、姿勢不當、長時間處在同一姿勢等等。頸、肩、背的酸痛問題常和姿勢有關,手部的酸痛問題則和高重覆性使用有關。
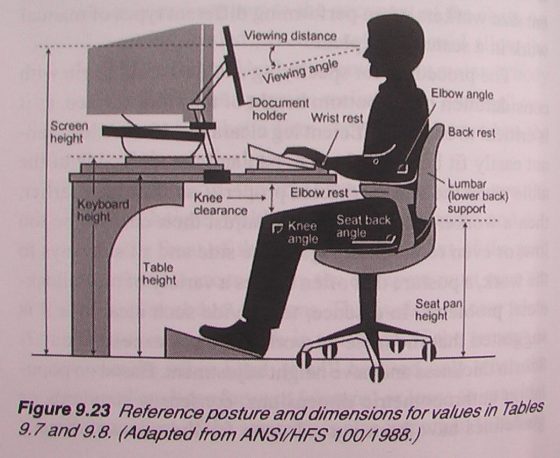
因此電腦族要用什麼姿勢打電腦比較輕鬆呢?除了要注意桌椅與姿勢的調整,也要記得定時從事伸展運動!
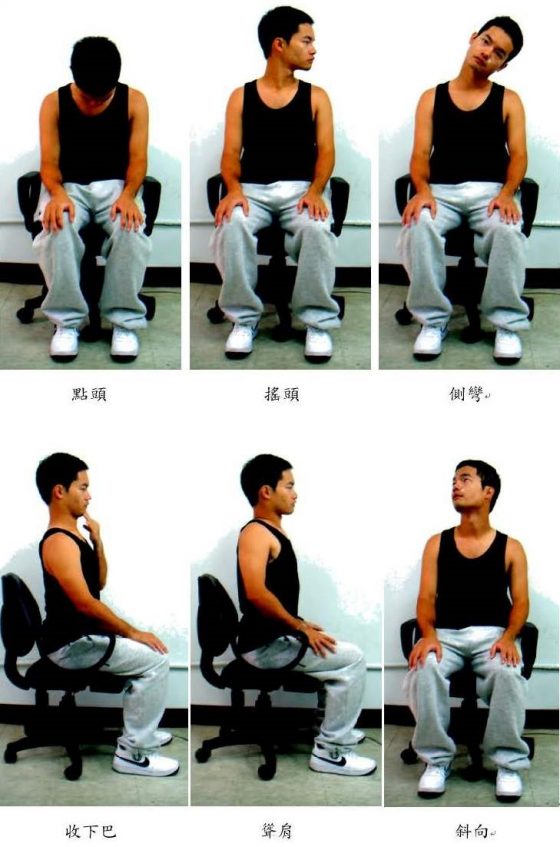
物理治療師建議六種電腦族可以做的伸展舒緩運動,包括點頭、搖頭、側彎、縮下巴、聳肩和斜向等動作。你可以將它們穿插在你的工作排程中,每次花 1-3 分鐘,每天做六回合,適時伸展你的頸肩,不要讓他們隨時處在緊張狀態。
男性要特別注意適時調整頸肩的角度,女性除了頸肩的問題,手部的伸展與肌力加強的訓練也要注意。
綜合前人研究與本篇研究的結果可知,男性及女性電腦使用者骨骼肌肉系統症狀的發生率都很高,且兩者使用電腦的姿勢與肌肉用力情形不同。若能藉由多面向的評估,偵測並量化其危險因子,可以減少骨骼肌肉症狀的發生或降低嚴重程度。


當然,未來如果能夠從研究中的危險因子找出有效且具較高順從性的物理治療計劃,將可提供電腦使用者更有效的早期介入治療方法。如此一來,不僅可以藉此降低醫療與社會成本,更可以預防電腦族們日後嚴重的累積性傷害或是失能等現象!
看完整的「男女電腦族承受之身心壓力之比較─利用多專業評估偵測骨骼肌肉系列症狀之危險因子」成果報告!
參考資料
- Bernard B, Putz-Anderson V, Burt S, Cole L, Fairfield-Estill C, Fine L (1997) Musculoskeletal disorders and workplace factors: a critical review for work-related musculoskeletal disorders of the neck, upper extremity and low back. Cincinnati: NIOSH.
- Cagnie B, Danneels L, Van Tiggelen D, De Loose V, Cambier D (2007) Individual and work related risk factors for neck pain among office workers: a cross sectional study. Eur Spine J, 16:679-86.
- Chaffin DB, Andersson GBJ, Martin BJ (2006). Occupational Biomechanics. The 4th Edition, Wiley Interscience: Hoboken, NJ.
- Cho CY, Hwang YS, Cherng RJ. (2012). Musculoskeletal symptoms and associated risk factors among office workers with high workload computer use. J Manipulative Physiol Ther.;35(7):534-40. doi: 10.1016/j.jmpt.2012.07.004. Epub 2012 Aug 27.
- Guo HR, Chang YC, Yeh WY, Chen CW, Guo YL (2004) Prevalence of musculoskeletal disorder among workers in Taiwan: a nationwide study. J Occup Health.;46(1):26-36.
- Fine LJ(1996) Musculoskeletal disorders in office work. In Moon SD, and Sauter SL (eds): Beyond Biomechanics. London: Taylor and Francis,.
- Yang JF, Cho CY.(2012) Comparison of posture and muscle control pattern between male and female computer users with musculoskeletal symptoms. Appl Ergon; 43(4):785-91. doi: 10.1016/j.apergo.2011.11.013. Epub 2011 Dec 12.
本文轉載自 科技部補助性別與科技相關規劃推動計畫 科研成果科普好文,原文〈打電腦,有煩惱:談男女電腦族常見的姿勢與酸痛問題 (96年卓瓊鈺教授計畫)〉
介紹了由國立成功大學物理治療學系卓瓊鈺副教授所主持的科技部96年度性別與科技研究計畫「男女電腦族承受之身心壓力之比較─利用多專業評估偵測骨骼肌肉系列症狀之危險因子」之研究成果。