
達文西被譽為世紀天才,除了留下很多達文西密碼外,他最為人熟知的,便是《蒙娜麗莎的微笑》、《最後的晚餐》等等美好細膩的畫作。不過,你知道他除了在藝術方面有卓著貢獻外,也是個超級斜槓的科學愛好者嗎?

這位文藝復興時代的英才,對於很多事物都有著強烈的好奇心。不同於咱們凡人的三分鐘熱度,但凡是這位大大想要研究的東西,他都會努力鑽研,因此,他在音樂、土木工程、數學幾何、生理解剖、動物植物,乃至於氣象與地質,都有涉獵,在當年可謂是「上知天文、下知地理」,完勝同時代的其他畫家。
東解西剖,揭開人體的秘密
達文西很早就開始接觸人體解剖學,在他的刀下,男人、女人、青年、老人,都無所遁形,他一生中解剖了 30 具左右的屍體。而牛、熊、蛙、鳥,也都是他研究的對象。
他曾與托爾醫生 (dottore Marcantonio della Torre) 合作進行解剖工作,並畫了 200 多篇畫作,並在死後將這些圖畫集結成《繪畫論》出版。(想想當年買的人心裡會有多驚嚇,你以為你買了一本在談繪畫的書,結果裡面充滿了屍體……)
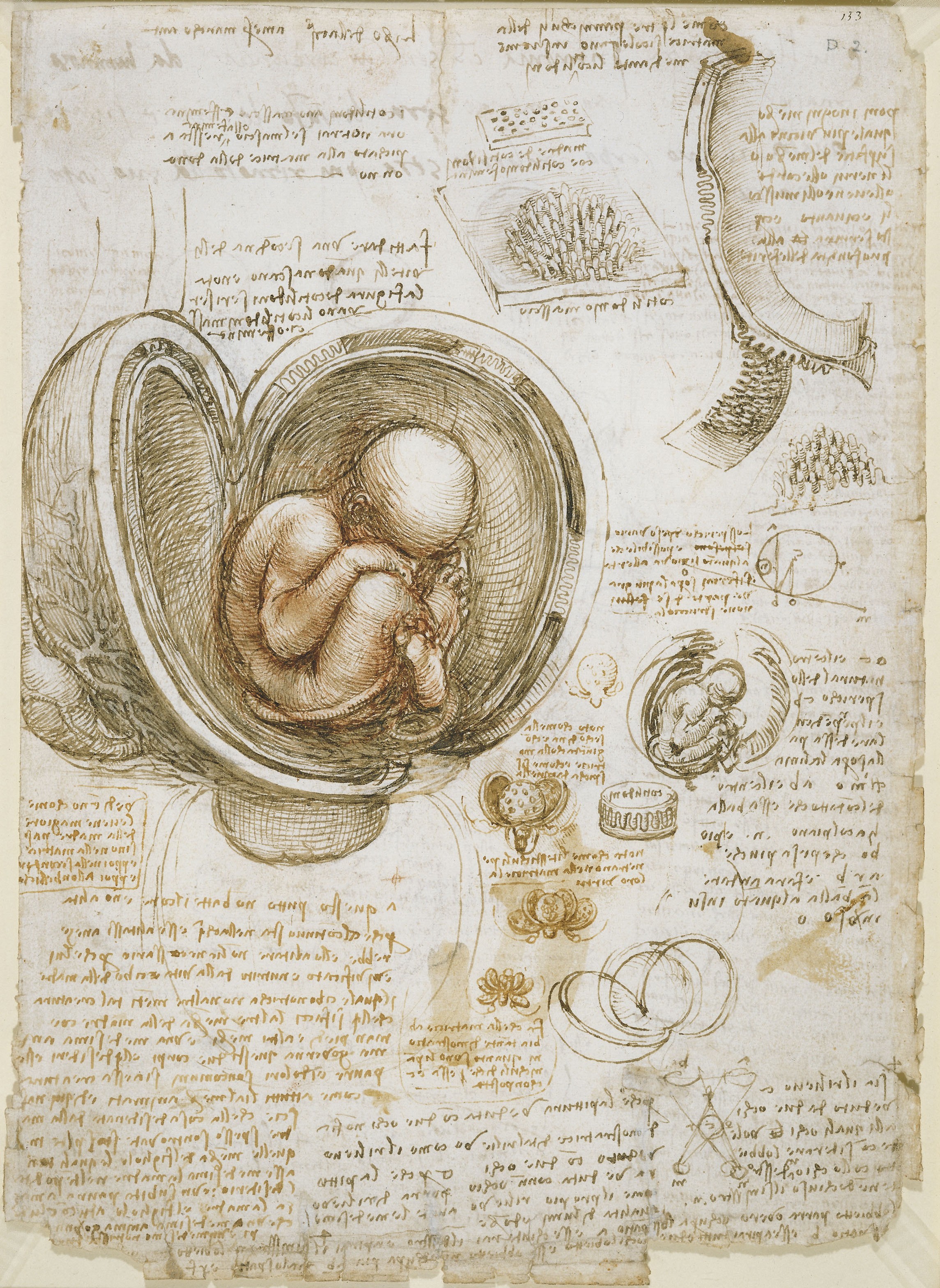
這些解剖讓他深入了解人體的肌肉、骨骼,乃至於血管和神經系統。達文西不僅針對生殖系統、臟器和大腦都做了詳細記錄、描繪視神經在眼球和大腦間的連結,更第一次畫出了子宮內的胎兒。
而你我都很有印象、也被無限惡搞的《維特魯威人》,這幅畫的名稱,來自於達文西很喜歡的一位古羅馬建築師。藉由維特魯威在《建築十書》中的敘述,達文西創作了這幅畫作,在其中也藏了許多數學的概念。
我們可以從圖片看出來,人體分別嵌進一個圓形和矩形中,這是怎麼做到的呢?維特魯威認為,如果以人的肚臍為圓心,可以描出一個圓形,而此人的手指和腳趾將與圓周接觸。另一方面,人們雙臂打直的長度約等於人的身高,因此,我們也可以將人放進正方形中。如此一來,你就可以得到一個又正又圓的人囉!(並不是)
一步~兩步~摩擦~有了力學天黑都不怕
達文西對於各種機械、力學都非常著迷,而他的研究成果,都藏在筆記中。幾年前,有人藉由研究他的手稿,發現達文西早在數百年前,便對摩擦力有了史上第一次系統性的研究。
研究人員認為,「達文西知道兩個滑動表面間的摩擦力與正向力有關,而與兩個表面間的接觸面積無關。」
而他對摩擦力的認識,也有助於各種機械的設計、發明。他曾經擔任軍事工程師,根據紀錄,他曾設計過弩箭、機關槍、降落傘、潛水裝和武裝坦克車等等機具。此外,他也設計過齒輪、腳踏車等等物品。
我在天上飛!達文西的飛行夢
除了地上跑的各種機械,達文西對天上飛的東西也充滿興趣。他用了很長的時間觀察鳥類飛行,藉由觀察牠們拍翅的動作,發明出各式「飛行器撲翼機」(ornithopter)。
想要操作這樣的機器,首先呢,你需要一位飛行員,他要非常忙碌地以手腳操作滑輪組、槓桿,再加上踏板。同時,達文西也貼心地裝上了落地架,要是飛得累了,可以伸縮支架以便安全落地。可惜的是,他進行的幾次試驗都失敗了。
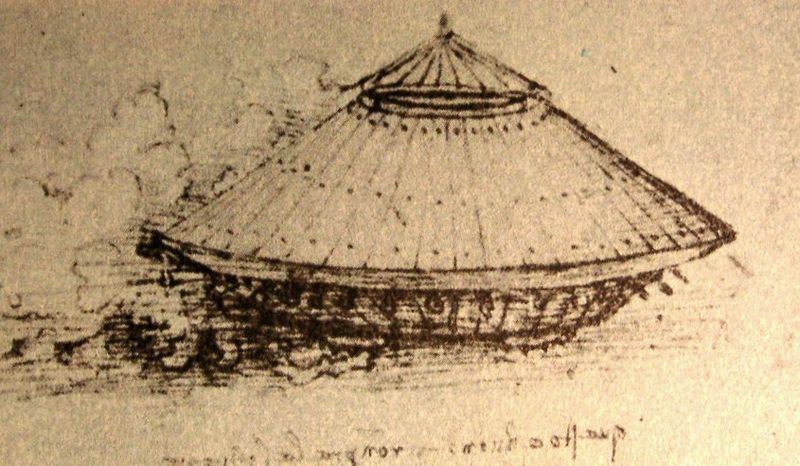
而另一個看上去十分酷炫的「空中螺旋器」(aerial screw),則是用螺絲起子般的葉片來壓縮空氣、輔助起飛。恩……但是這樣的設計讓機身過於笨重,所以螺旋器還是只能留在地上轉轉轉了。

…..這麼說,達文西也沒這麼聰明嘛?欸欸,可別小看人家啊,像他發明的三角形降落傘雖然看上去很神秘,卻是十分厲害的呢!曾有人在 2000 年時利用他的設計草圖打造原型機,結果完美通過測試,可以讓人隨風飄搖。
天才之星,始終閃耀
也正是因為達文西在各領域都給了我們很多啟發,大家很喜歡用他來命名各種東西,比如說,美國天文學家 Schelte J. Bus 於 1981 年發現新的小行星時,便以達文西為其命名,稱之為「小行星 3000 李奧納多」。
近幾年引起許多關注的「微創手術」中,也可以見到達文西的名字。發明這種「達文西手術系統」(Da Vinci Surgical System) 的研發公司透露,這種器械的靈感來源便是達文西設計過的機器人。
即便過了五百年,達文西的靈光仍是讓人讚嘆。對於你來說,最吸引你的是達文西哪個部份呢?
參考資料:
- 達文西的《维特鲁威人》數學 – 詹姆士.厄爾
- 橫跨科學與人文藝術的天才──達文西誕辰│科學史上的今天:4/15
- Engineer Finds a Huge Physics Discovery in Da Vinci’s ‘Irrelevant Scribbles’
- Codex on the Flight of Birds
- 達文西的飛行夢 -《知識大圖解》
- Da Vinci’s parachute flies
- “Leonardo da Vinci’s studies of the heart” Mohammadali M.Shoja, Paul S.Agutter, Marios Loukas, Brion Benninger, Ghaffar Shokouhi, Husain Namdara, Kamyar Ghabilia, Majid Khalilih, R. Shane Tubbsb International Journal of Cardiology
- Volume 167, Issue 4, 20 August 2013, Pages 1126-1133 https://doi.org/10.1016/j.ijcard.2012.09.078
- “Leonardo da Vinci׳s studies of friction” Ian M.Hutchings Wear Volumes 360–361, 15 August 2016, Pages 51-66 https://doi.org/10.1016/j.wear.2016.04.019
- 《開膛史》蘇上豪著 時報出版
 《達文西傳》(達文西逝世500周年紀念版)泛科市集 79 折優惠中!
《達文西傳》(達文西逝世500周年紀念版)泛科市集 79 折優惠中!








































{kind=link}