外太空雖然仍舊寂靜,但最近針對眾多的討論讓它顯得熱鬧非凡。新視野號在2015/7/14掠過冥王星,並不斷回傳讓人驚奇的影像和資料;與此同時,另一棚的克卜勒太空望遠鏡(Kepler)也發現了目前為止跟地球最相像的行星:Kepler-452b。
NASA在2015/7/23公布了這令人興奮的消息:雖然大家都以「地球2.0」稱呼這個令人興奮不已的發現,但在此之前我們不是已經用了很多像是「地球級系外行星」、「超級地球」、「最像地球的行星」等名詞,來形容過去發現的眾多在適居帶(habitable zone)的行星嗎?這次的發現真的有特別不一樣?難道我們之前的誓言都只是兒戲嗎?(女主角梨花帶淚模式on)
找系外行星嗎?你需要克卜勒之眼
美國太空總署(NASA)設計的克卜勒太空望遠鏡於2009年發射,運行的是尾隨地球的日心軌道,這樣克卜勒太空望遠鏡的觀測就不會被地球影響。它的任務是找尋環繞其他恆星的類地行星。克卜勒太空望遠鏡長期檢測15萬顆以上恆星的亮度,觀察它們是否有行星凌日現象:如果有一顆恆星的亮度會週期性的稍微變暗,又在不久以後恢復,就表示可能有行星繞行這個恆星,才發生掩星現象。
不過,還有其他原因會導致亮度的細微波動,例如有些恆星本身亮度就變化很大,所以所有的克卜勒所發現的候選行星都必須加上其他觀察,進一步分析收集到的資料。「確認是非常耗時的。」在加州山景城SETI研究所的克卜勒研究科學家考夫林(Eff Coughlin)說。 因此克卜勒團隊將確認過程自動化,結果發現小岩石(small rocky planets)行星是目前名單中最常見的行星類別,多達25%。

2013年5月,由於克卜勒的反應輪故障(這又是一段很長的故事了),無法設定望遠鏡方向而暫停搜尋系外行星的任務。不過2014年就以雙輪模式復活,這個稱為K2的計畫裡也有些進展,找到了鄰近恆星系有3顆與地球相當的系外行星。而這次的Kepler-452b則是在過去的克卜勒計畫中羅列的500顆候選行星中發現的。克卜勒太空望遠鏡每30分鐘收集一次資料,要有3次凌日記錄才會被加入候選名單。截至2015年1月為止,克卜勒太空望遠鏡已在440個恆星系統中發現了1013個系外行星(exoplanet),需要進一步確認的候選名單(candidate list)還多達3,199個。
除了找到系外行星,還有另外一個人類更關心的事:適不適合居住?
安安,你聽過適居帶嗎?
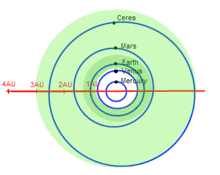
過去有分析研究推測,在銀河系中調查過的類日恆星中,大約有五分之一的恆星會有在適居帶(habitable zone)上繞行的行星,適居行星撒遍銀河系啊。我們對適居帶的想像,其實仍奠基在地球的條件之上,所以有一個很重要的原則:行星表面必須維持有液態水。(奇怪耶你,找外星生命一定要先找水嗎?)
因此這個類地行星距離它的母恆星不能太近也不能太遠:一方面是為了有適宜的溫度,另外一方面,剛好不會太熱或太冷的距離,行星表面才有可能有液態水,而不是水蒸氣或是冰。聽起來條件嚴苛(適居帶有時也被稱為「古迪洛克區(Goldilocks Zone)」因為童話古迪洛克當中的小女孩喜歡吃不冷又不熱的粥,真是難伺候啊),但其實這條帶可寬可窄:能離母恆星多近,其實是要取決於恆星的大小和能量輸出。對於比較小的恆星,像是紅矮星,適居帶可能會像是圍著火爐烤棉花糖一樣靠近。但對於巨大且炙熱的恆星,這條帶就必須退到安全距離外。
有方程式可以計算適居帶和恆星之間的距離,主要的依據是利用恆星的光度。但這個方法用來算太陽系的適居帶其實就不太靈光了:例如,金星在適居帶內緣附近,但他表面濃厚的二氧化碳大氣層讓它表面高達462 °C,根本就沒辦法住人。所以儘管有公式,適居帶仍然要依星系而制宜,也不是在適居帶上的行星都能適居。
另外一個要維持表面有液態水的條件是行星質量。質量跟重力有關,地球的質量剛剛好,不會小到重力太微弱而無法抓住大氣,讓氣壓太低而水無法存在於行星表面;同時也不會重力大到讓氣壓過高,以至於液態水無法形成。
但關於適居帶也有些批評,認為太過地球本位主義,自會有出路的生命搞不好在其他看似嚴苛的環境下也能生存。(其實在地球也不乏一些極端的例子,像是地表下十公里,極高溫或是厭氧環境都還是有生物。)
Kepler 452b啊,是什麼讓你如此特別
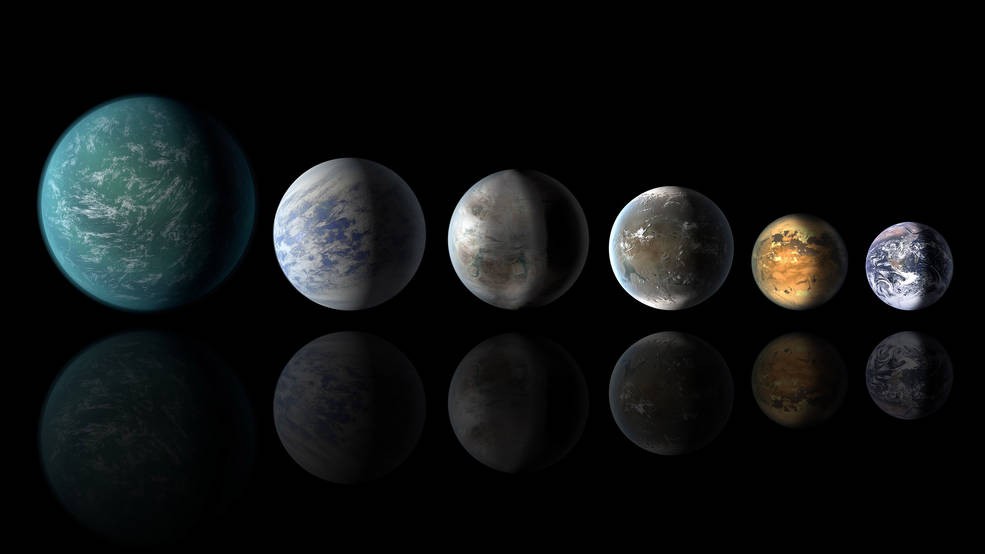
到目前為止,有大約十幾個在適居帶上接近地球大小(體積約是地球的1/2~2倍)的行星被發現,光是Kepler就發現了12個在適居帶上的小行星。那Kepler-452b到底有什麼特別?
Kepler-452b距離地球有1400光年遠,他的一年是384.84天,直徑是地球的1.6倍。測量不會包括任何有關質量的資訊,但是從相似的系外行星判斷,研究團隊推估他的質量是地球的5倍,所以任何的到那裡造訪的旅客都會感受到在地球的兩倍重力,地心引力更抓得住你。團隊諮詢了行星地質學家,他們推測Kepler-452b可能經歷過一段火山活躍期,它的高質量給了它一個比地球還要濃的大氣層。
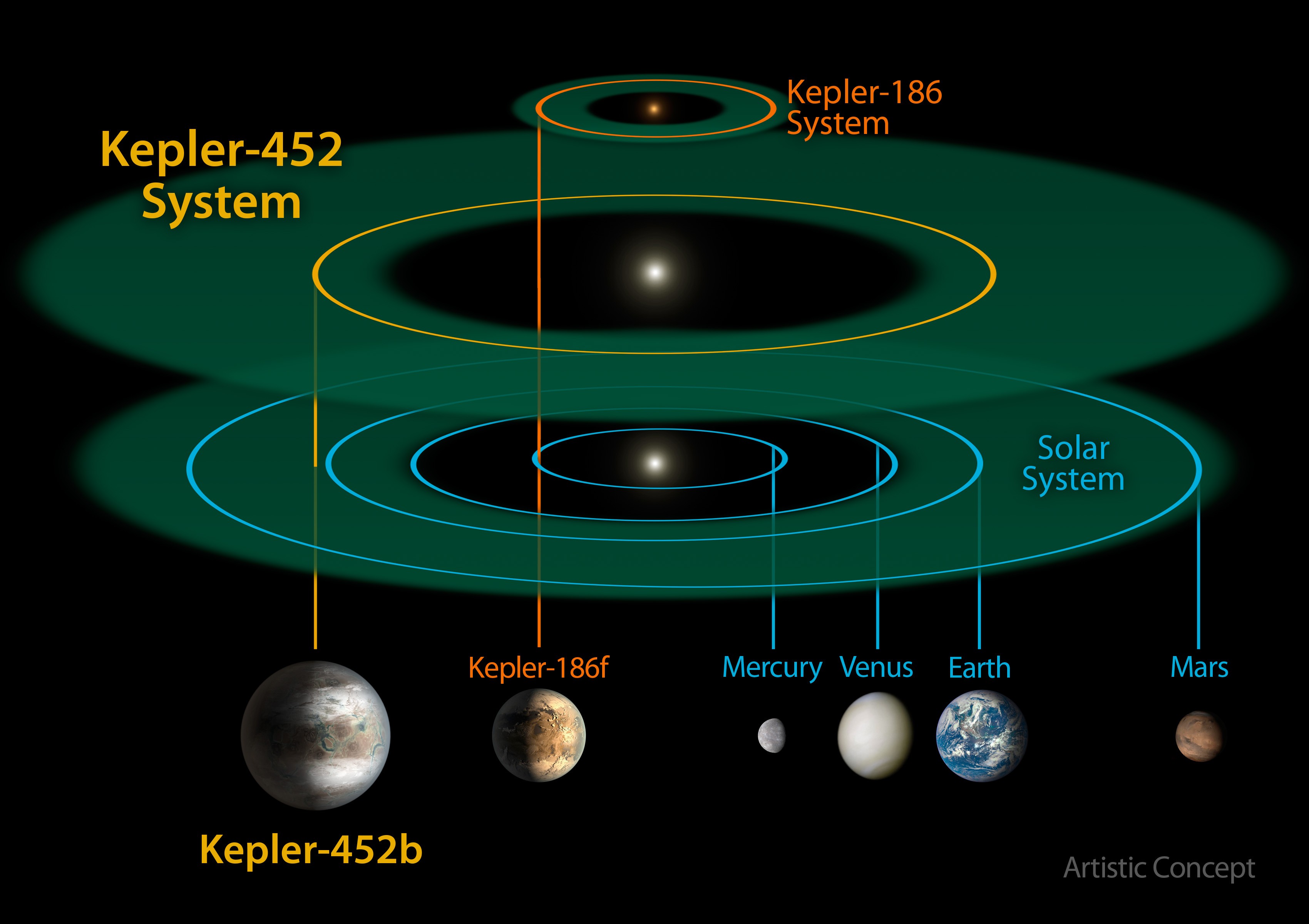
但讓Kepler-452b特別不同的,還有它繞行的母恆星。Kepler-452b的母恆星年齡比太陽大15億歲,亮度多了10%,質量也多了4%,但軌道與恆星的距離也較地球與太陽遠 5%,所以Kepler-452b剛好在它星系的適居帶內,但也有可能會經歷失控的溫室效應,類似現在被烘烤的金星。而且,它和太陽同樣都是G型恆星。(為了避免恆星分類就要講上一整天,詳細的分類法可以參考這裡。)
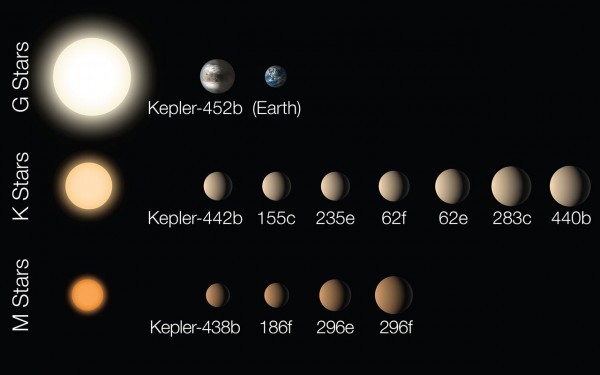
克卜勒太空望遠鏡之前發現的12個在適居帶上的行星,有四個是圍繞著質量和光度都比太陽還小的M型恆星、七個是繞著稍微和太陽比較接近的K型恆星(恆星分類以光譜標示,依據恆星的溫度由高至低排序(質量、半徑和亮度皆與太陽比較)分別是:Oh! Be A Fine Girl Kiss Me),而Kepler-452b是第一個繞著G型恆星的。
那過去說的一切,通通不算數了嗎(泣)
如果跟天文界有保持聯絡的話,你會想起:過去不是也發現了很多跟地球很像的行星嗎?
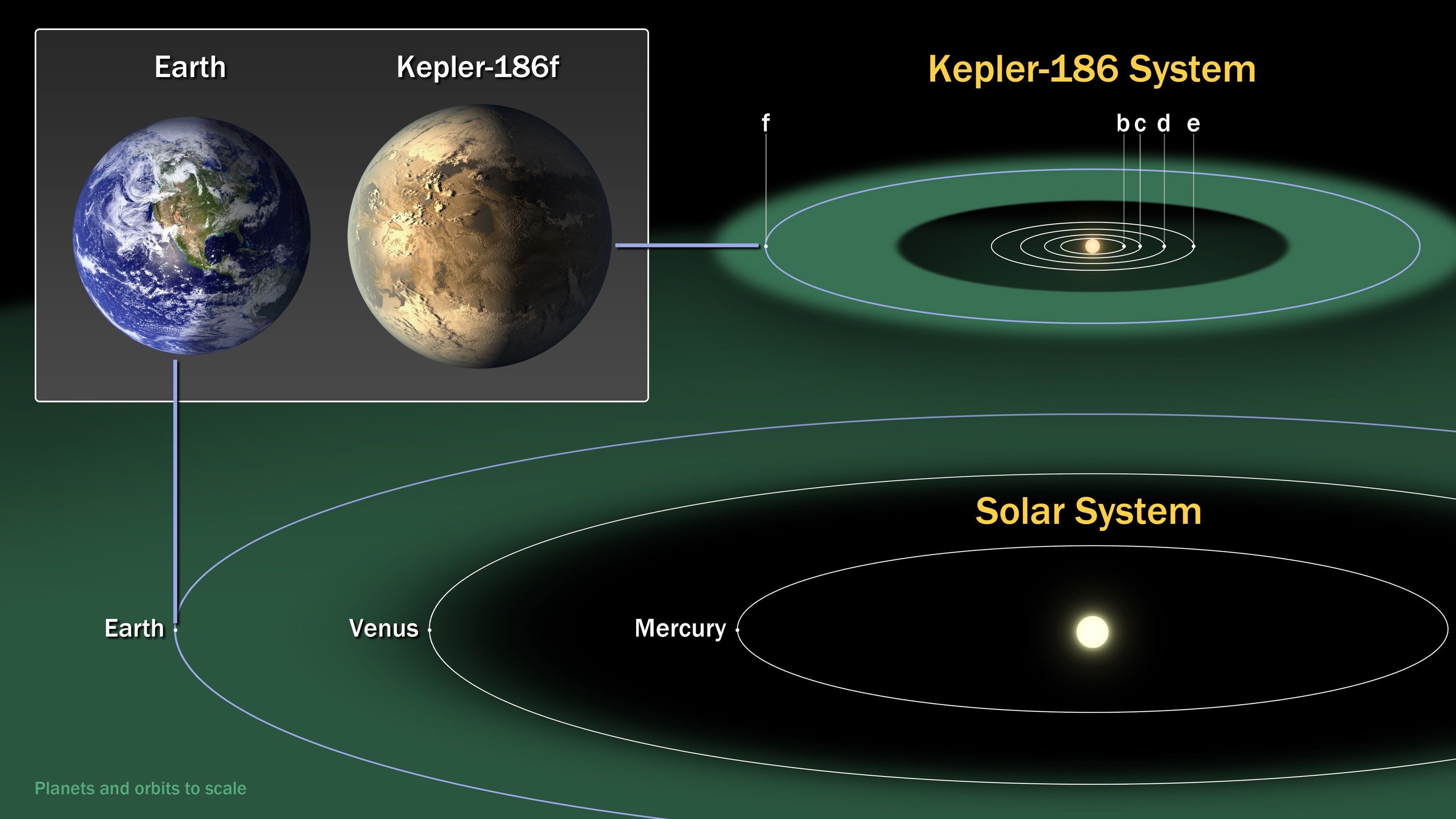
在Kepler-452b出現之前,被稱為「地球最像行星」的是Kepler-186f,它在2014/4宣布發現,距離我們約500光年,比地球大不到10%且位在適居帶,所以表面也有可能水汪汪。不過他圍饒著的恆星是跟太陽比起來質量較小、溫度較低的紅矮星,Kepler-186f又在適居帶的外側所以上面會涼爽一些,Kepler-186f的中午感覺就像地球日落前一小時的黃昏,而且只要130天就可以過年了。
在Kepler-186f之前(是一個在點名前任情人的概念?),最類似地球的系外行星是Kepler-62f。但它其實算是超級地球,因為它比地球大了約40%,公轉週期為267天,母恆星也比太陽還要小、溫度也比較低,距離我們1,200光年,位在天琴座的方向。和Kepler-162f在2013/4同時期宣布發現的,還有Kepler-69C。

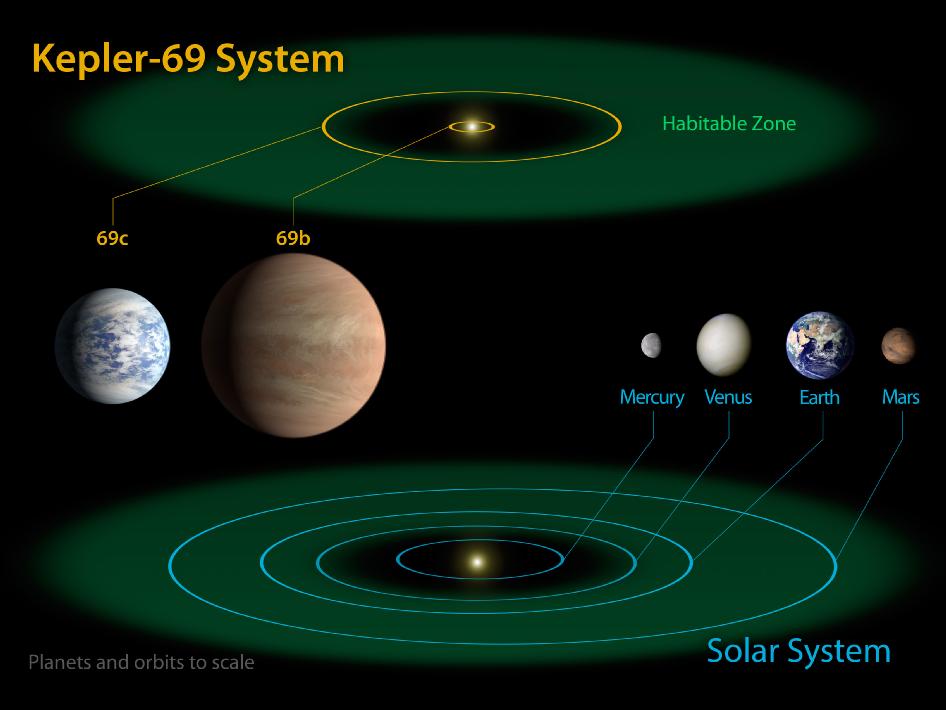
Kepler-69c更是個超級地球,他比地球大了70%,公轉週期為242天,它的母恆星和地球較為相近,大小差不多,光能量大約是太陽的80%(意味著溫度可能差不多。),行星系統距離我們2,700光年遠,位在天鵝座的方向。
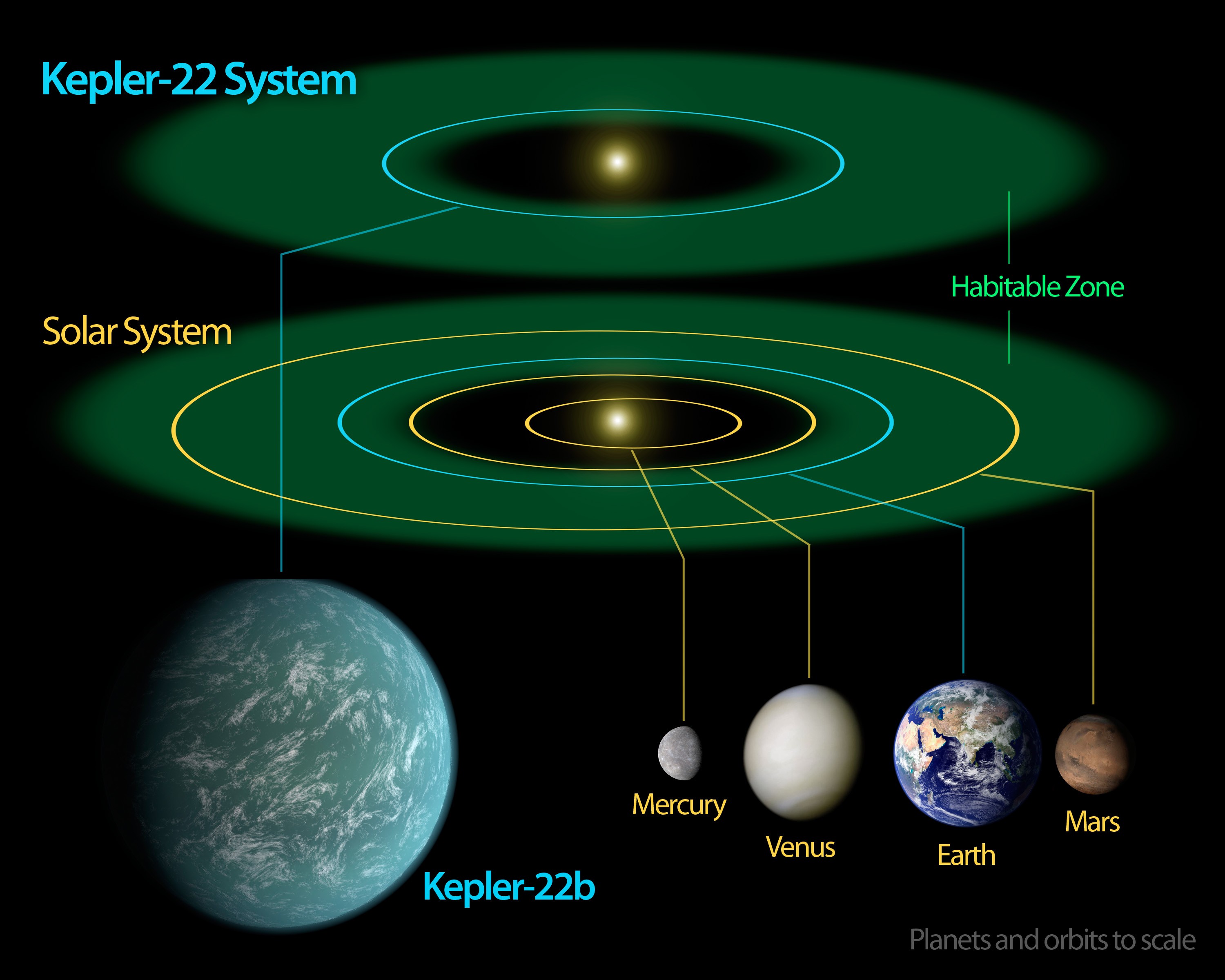
還有於2011/12公佈,克卜勒太空望遠鏡上工第三天就找的Kepler-22b。這是人類首度在類太陽恆星旁的適居帶中間發現的超級地球,它約是地球的2.4倍大,距離我們600光年遠,公轉290天,母恆星射出的光能量比太陽少25%。
其他不勝枚舉的還有Gliese 667Cc、Gliese 581g(在2010/9公佈時也被稱為「發現至今與地球最類似的系外行星」)、EPIC 201367065的行星…等等等等等。
扣除掉Kepler-452b略大的尺寸和其他一些仍太不確定的因素,它確實是個令人非常興奮的發現–這是到目前為止我們找最接近地球的系外行星了。我們對於「第二個地球」抱有很多的懷想:移民、外星生命、藉此探索地球和生命的起源……;相信Kepler-452b不會是這趟追尋之旅的終點,「地球2.0」或許過不了多久又會換人當了。
其他延伸閱讀:
- 尋找第二個地球
- 適居行星撒遍銀河系
- 奇怪耶你,找外星生命一定要先找水嗎?
- 外星生命未必外星人—找不到是另一回事
- 大氣層能讓行星轉變成適合居住的世界嗎?
- 發現至今與地球最類似的系外行星
- 銀河系中的超級地球可能非常普遍
- 適居帶系外行星「週期表」網路豋場
- 首度在類太陽恆星旁的適居區中間發現超級地球
- 首度發現地球級且位在多行星系統中的系外行星
- 像地球的適居帶類地系外行星第一名換人了
- 克卜勒任務發現迄今最小的適居行星
- 發現第一顆位在適居區內的地球級系外行星
- Gliese 832c:獲頒「和地球最相似的系外行星」第3名
- 鄰近恆星旁發現3顆與地球相當的系外行星
參考資料:
- Finding Another Earth. NASA [July 23, 2015]
- NASA spots most Earth-like planet yet. Science [July 23, 2015]
- Kepler、Circumstellar habitable zone、Stellar classification 等維基條目。