- 圖/pixabay
人的周圍神經系統(PNS,如:運動神經和感覺神經)在受傷之後,通常可慢慢修復。但是,中樞神經系統(CNS,如:脊髓神經)的修復則相當棘手,也是目前醫學研究尚待解決的問題。
中樞神經受損造成的傷害,包含車禍或工害造成的癱瘓。然而,一直以來都讓我們束手無策的「癱瘓」,現在有機會修復了嗎?最新跨國研究發現,人工合成的「硫酸乙醯肝素(HS)」八醣體可讓受損的中樞神經元成功啟動修補機制。
修復中樞神經的關鍵
關鍵為抑制去磷酸根作用。
研究指出,當中樞神經受到重大的外力打擊時,人體會分泌「硫酸軟骨素(Chondroitin Sulfate, CS)」聚集於受傷的神經軸突(Axon),並和受體PTPRσ結合,經催化作用去除細胞質內Cortactin蛋白的磷酸根,進而導致神經軸突末端產生球狀凸起物(dystrophic endballs),遏制軸突繼續生長,終止神經修復。因此,中樞神經修復的關鍵為抑制去磷酸根作用。
洪上程博士的研究團隊繼2011年成功合成3號氧含有硫酸根之HS八醣體能抑制疱診一型病毒感染宿主細胞發表在《自然-化學》(Nature Chemistry)後 ,進一步發現HS和CS的化學結構相近,且HS的功效與硫酸根的位置和數量息息相關。
高難度醣分子的合成

研究團隊表示,醣分子的合成向來具高難度,這類結構複雜之HS寡醣分子的製備更不容易。合成不同硫酸根的HS化合物,就需要50多個步驟。
為了一探HS分子如何與受體PTPRσ作用,以及是否能修復中樞神經元受損的軸突部位,洪上程博士實驗室的蔡政芳博士和郭彥均博士歷經多年時間,開發新的合成途徑,成功地製備十六種不同硫酸根的HS八醣體分子。同樣熟稔含硫酸根之醣分子研究的日本鳥取大學田村純一教授帶領的團隊則負責合成CS化合物。
實驗結果
門松健治的研究團隊,從老鼠身上取得一種從脊椎延伸到肌肉的中樞神經元——背根神經節(dorsal root ganglion,DRG),並把切斷的DRG分別放到鋪了CS化合物和CS與HS化合物的培養皿。
研究成果顯示,實驗的第二天後,軸突碰到培養皿內的CS時,CS與PTPRσ結合,移除Cortactin蛋白的磷酸根,便停止生長。反觀,在加入具有較多硫酸根數量之HS八醣體的培養皿中,軸突則能持續生長;而沒有硫酸根或硫酸根數量少之HS八醣體族無法讓軸突繼續生長。
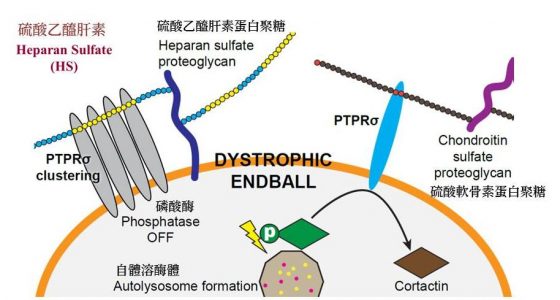
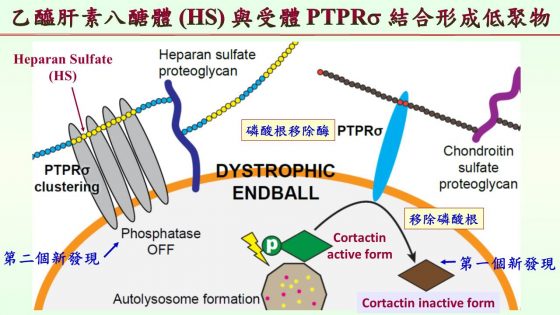
洪上程博士解釋,HS八醣體具有較多硫酸根數量時,能取代CS醣分子並與PTPRσ結合,並將幾個PTPRσ結合在形成低聚物(Oligomer),進而抑制Cortactin蛋白的去磷酸根化反應,讓軸突可以繼續生長。
名古屋大學醫學院坂元一真(Kazuma Sakamoto)副教授表示,研究發現提供了一個以分子修補神經元的契機,HS 或是 PTPRσ抑制劑,都可能是未來關鍵的研發目標。
- 本文改寫自中研院與科技部新聞稿,原標題為〈中樞神經再生露曙光 人工合成八醣體可修復脊髓神經元〉。
- 研究論文已於108年5月7日刊登於國際期刊《自然-化學生物學》(Nature Chemical Biology),論文名稱:〈Glycan sulfation patterns define autophagy flux at axon tip via PTPRσ-cortactin axis〉
- 此研究由中央研究院、科技部攻頂計畫 、以及日本文部科學省和學術振興會共同資助。共同第一作者為名古屋大學醫學院坂元一真和中央研究院基因體研究中心蔡政芳博士和郭彥均博士。共同通訊作者為中央研究院基因體研究中心主任洪上程和名古屋大學醫學院院長門松健治,共同作者包括神户藥科大學副校長北川裕之、鳥取大學田村純一教授。