

《侏羅紀世界》打破多項影史票房紀錄,全球再度掀起恐龍熱,當然,我們很難不去挑剔電影中的女主角穿著不知幾吋高跟鞋狂跑的荒唐鏡頭,以及它的劇情根本只是套以前《侏羅記公園》的老套公式,再把影劇內的人事物換了一下了事,但這和四千萬年前的蚊子能吸到六千五百萬年前就已經死光光的恐龍血(算術不及格),和白堊紀恐龍跑到侏羅紀公園湊熱鬧,張飛打岳飛等大笑話、負面教材一比,前述的缺點可說是無關緊要了!反正電影嘛,搏君一笑就好了,就如我們看台灣當下那些政客名嘴所說的,能認真地「ㄏㄠˋㄍㄨㄛ」嗎?同樣的道理,哈哈一笑,可也,認真不得。
不過,這一系列的電影主角,兇猛的暴龍以及其它敏捷的肉食性恐龍張開血盆大口、追逐吃咬獵物的鏡頭,肯定是令觀眾印象深刻。先撇開到底這些獸腳類出現於地球的時間對不對、身上有沒有毛髮等問題不談,牠們咬食的最基本工具--牙齒,到底是怎麼一回事?
牙齒決定了吃什麼
我們老中自古以來有句俗諺說「民以食為天」!美國人則有一句話說:「你就是你吃的東西(You are what you eat.)」,我們所吃的食物,決定你我如何:吃得好吃得對,身體健康,做事有幹勁;吃不好吃不對,健康出問題,昏聵人生。有好的牙齒,可享受營養可口的大餐,沒有好牙齒,空有山珍海味在眼前,也無福消受,豈不是折磨嗎?
除了要有好的牙齒之外,更需要有對的牙齒,沒有對的牙齒,同樣只能流口水,有看吃不到,滿口假牙的老人家應該最能體會這些話。換一個角度來說,牙齒的結構,決定吃什麼,當然,整個嘴巴上下頜骨的構造,也是非常關鍵,不過那是本文的題外話。
回到恐龍話題,以食性作區分,恐龍可分成「肉食性」、「雜食性」、和「植食性」等三大類。在說下去之前,我要先罵罵人--經常看到無知或糊塗蛋記者使用「草食性」這個用詞;但侏羅紀的時候,我們現今所認知的「草」根本還沒出現於地球上,直至今天,也尚未發現任何恐龍吃「草」的證據,所以若要問我恐龍究竟吃的是什麼草?恐怕得請不用功的記者大德代為回答了。
過去,研究學者對於恐龍的食性分類,是依據骨盤裡面的坐骨和恥骨方向:然而問題來了,恥骨指向尾巴的鳥臀目恐龍的確都是吃素的沒錯,但恥骨指向頭部的蜥臀目恐龍又分為吃素的蜥腳類和吃葷的獸腳類;我個人總覺得,看屁股決定吃葷吃素,會不會太鬼扯了一點?天下豈有看屁股吃東西的道理?牙齒才是決定該動物吃什麼的最主要直接關鍵,恐龍的食性判斷,也應該要以牠的牙齒基準。因此,恐龍牙齒的型態與結構,才是我們玩恐龍食性者該探討的課題項目。

說到了牙齒型態和結構,要先從型態,也就是牙齒的形狀說起。侏羅紀的植食性恐龍,牙齒形狀像鉛筆,可能會稍微往內彎,外型構造相對簡單;而且整個頭部相對於實際的身體長度和大小來說,簡直不成比例:這類恐龍的身長可達 20、30,甚至 40、50 公尺,就算是體型更大的蜥腳類恐龍,頭部長度也頂多 60 公分而已。牠們頭顱裡面的牙齒像耙子,把植物的葉子一股腦地往肚子裡面送,完全沒有經過咀嚼、切碎的步驟。
這些出現於侏羅紀中晚期出現的蜥腳類恐龍可說是地球史上身體最長、體型最大,也是噸位最重的動物,至今沒有任何其它的動物可以和牠們比擬。一個很有趣的問題出現了,吃素的牠們到底為什麼會長得這麼大?成長速度還能這麼快?牠們一天要吃幾噸的樹葉?拉出幾噸的大便?這種「巨大現象 (Gigantism)」,到底怎麼一回事情?實在令人好奇。
另外,這些龐然大物就是讓一般人,特別是媒體記者們所喜歡使用「恐龍XX」取笑某些遲鈍、腦筋不靈光、不食人間煙火者的由來,但牠們真是如此顢頇、行動遲鈍嗎?這群古老而巨大的動物用尾巴當作自我防禦的武器,鞭打想吃牠們的獵食性恐龍,科學家算過,牠們甩動尾巴的速度可能高達每小時 60 英哩(相當於時速95.56公里)!可別忘了這群大傢伙可是在地球上興盛存活了一億年,令人不禁懷疑那些挪揄、謾罵別人是「恐龍XX」者,到底是在譏嘲罵人,或是在捧人?又或只是彰顯罵人者自己的無知?
接下來到了白堊紀,特別是白堊紀晚期的植食性恐龍,牙齒的演化就更為有趣了。角龍類和鴨嘴龍類的體型雖然沒有蜥腳類恐龍那麼大,但部分種類的體型還是可達十多公尺,嘴巴裡面的牙齒數目可能高達兩千以上,並具備咀嚼、磨碎樹葉的功能。
恐龍有一副怎樣的牙齒?
說了半天還沒進入主題,該打屁股!現在馬上就回來談肉食性恐龍的牙齒。
在 2015 年 7 月 28 日美國東部時間上午 5 點鐘(台灣時間 28 日下午 5 點鐘),本團隊在自然出版集團的重量級期刊《科學報告 (Scientific Reports)》發表〈獸腳類恐龍有鋸齒之牙齒發展和演化的重要性 (Developmental and evolutionary novelty in the serrated teeth of theropod dinosaurs)〉,這篇文章可說是國際兩岸聯合科研團隊在研究世界最古老恐龍胚胎課題中,無心插柳得到的意外成果。
此項研究本來是團隊老大賴茲 (Robert Reisz)院士的博士生,克絲丁●布林克 (Kirstin Brink)的博士論文研究課題,和台灣團隊並無直接關係,在一次賴茲院士提起後,我主動為台灣團隊爭取機會,雖然他多次指責我們多管閒事,表示這項研究和我們無關,別想攪局參一咖!但我還是懇求他務必讓台灣團隊試試看,承諾若我們不能為該研究做出貢獻,便不必放進論文裡,就當作是我們團隊額外的練習題。
沒想到,台灣團隊四人(佔作者群的一半)的努力成果,竟促使克絲丁整個研究計畫,回歸最原本的繪畫版,重新檢討原本的論點,更提出強而有力的證據、推翻了過去對於肉食恐龍鋸齒的認知,說明這些具關鍵意義的小鋸齒的來龍去脈。我們難道不該浮一大白慶祝一下?
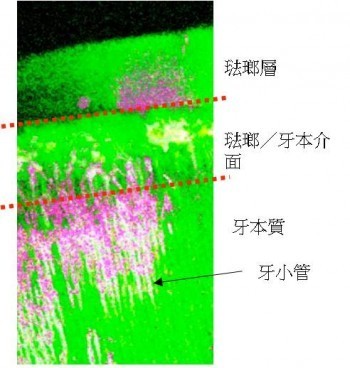
先從最基本的牙齒構造來開始說明:每根牙齒可分為露出在牙床外面,以及埋在牙床內的牙根等兩大部份,牙床外面的部份,如圖二的結構,最外面的是琺瑯層,最裡面的是牙本質,兩者之間有個被稱為「琺瑯/牙本介面 (Dentin Enamel Junction, DEJ)」的區塊,而牙本質內還有很多的牙小管 (Dentinal Tubules)。牙齒的強弱,取決於這三層裡的構造,也影響了動物會吃哪些東西。
我們的研究發現,吃素的恐龍牙齒,部份牙小管從牙本質區域直直地延伸到琺瑯/牙本介面區域,少數又延伸到琺瑯層;相對地,吃葷的恐龍牙齒,牙小管會從牙本質延伸到琺瑯牙本質介面區域裡面,並打結成球狀、形成被戲稱大家為「干貝」的構造,我們認為這些「干貝」可能俱備了力學緩衝的功能;吃素恐龍的牙齒,不若吃葷恐龍需要進行咬碎骨頭、撕開肌肉等大力道的動作,在此區域內的牙小管型態,就沒有必要有力學緩衝的機制,所以直直的也就夠了。此介面區域內的牙小管型態構造不同,決定了該恐龍的葷素食性;現在就來考考看倌們的眼力,圖二的恐龍,究竟是吃葷的,抑或是吃素的?很有趣吧!
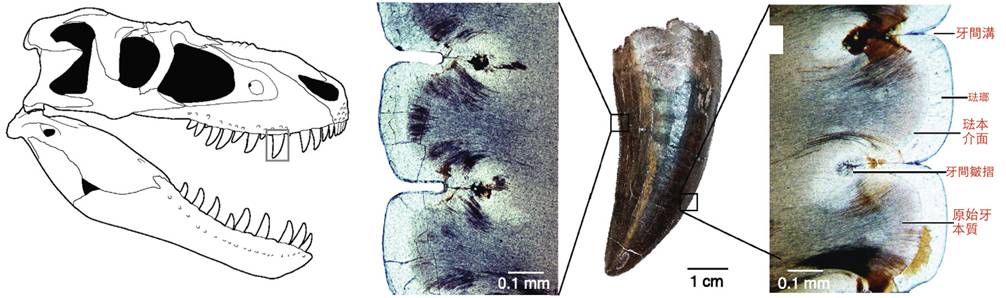
除了上述的「牙齒結構決定恐龍的食性」外,肉食性,也就是獸腳類恐龍的牙齒,為了方便咬撕獵物,牠們的牙齒除了會往口內彎曲,以防止獵物掙脫外,從橫切面來看,這些接近橢圓型的牙齒的前後兩邊,都有小鋸齒存在(如圖三所示),就像牛排刀的刀鋒一樣,可以用來撕咬獵物的肌肉。雖然大部分的肉食恐龍牙齒並不是特別巨大,但是暴龍口中最大的「牛排刀牙齒」連同齒根可達 30 公分,若滿口都是這種類似牛排刀的粗壯牙齒,一次吃下幾百公斤恐龍肉恐怕也稱不上什麼難事。
底下的圖四是裝設在美國蒙大拿州立大學,洛基山脈博物館外的原尺寸暴龍銅複製,頭部離地大約三公尺(一層樓高)。試想,如果在你的頭頂上,出現這麼一個血盆大口,眼睛緊盯著你,隨時準備要一口把你吞下,你不會嚇得屁滾尿流?不過我們其實大可以放心,人類出現在地球才不到一千萬年,這些活在陸地上不會飛的恐龍,早在六千五百萬年前就滅絕殆盡了,絕對不可能如某些話唬爛騙人的報導:「恐龍之所以會滅絕,是因為牠們原本是人類的寵物,那時的人類未盡到該有的責任,沒有好好照顧恐龍,導致牠們的滅絕」--嘿,不要說我亂扯蛋,曾經就有台大外文系畢業當老師的某人,真相信有這麼一回事情,還特地跑到雲南要證實這種荒謬。

肉食性恐龍上面的小鋸齒
又扯遠了一點,讓我們再回到肉食恐龍牙齒上面的小鋸齒上;圖三中最右邊有註解的這張相片,請仔細看到從自最下方數到第二個的註解「牙間皺摺 (inter-dental fold)」。以往,包括本次研究的中期以前,這個結構都被稱為「牙間洞 (Ampulla)」,普遍的認知是,當肉食恐龍咬到獵物骨頭和撕裂肌肉時,會對獵者牙齒的小鋸齒產生很大的壓力,容易導致兩個小鋸齒間產生裂隙,並在裂線底部產生一個小洞,作為應力的緩衝,以保護小鋸齒和整根牙齒不會繼續受損,產生更嚴重的傷害。
過去曾有無數篇論文都以「牙間洞 」為前提來展開討論,我們團隊一開始也延續這個想法;依照此說,這些「牙間洞」有可能藏著當年的食物碎屑,就像我們的蛀牙那樣會塞食物,並有細菌跑進「洞」裡來消化這些食物碎屑。如果能透過國家同步輻射研究中心的 BL-14A 工作站傅立葉轉換紅外線 (sr-FTIR)掃描,我們應該有機會在這些牙齒化石切片中,找到殘留有機物的證據;這也是我用來說服賴茲院士的有力說詞,於是乎他終於答應提供台灣團隊相關樣本,進行一系列的掃描。
團隊中服務於同步輻射研究中心的江正誠先生,以他笑傲江湖、獨領風騷的高超製作試片技巧,磨了不知多少試片,我和該中心世界頂尖的光譜專家李耀昌博士則花了不知多少時間,做了無數次的顯微紅外線掃描,卻始終未能在牙間「洞」裡發現機殘留物的波峰、找出任何有機物殘留的證據;也就是說「牙間洞」的存在很可能並非向大家過去所認知的那樣,而是一個需要重新思考的課題。
在我粗淺紅外線光譜分析中,雖然沒找到任何有機物殘留物的蛛絲馬跡,卻看到了相對未成熟的磷灰石群礦物(即構成牙齒的基本礦物質),這意味著有新的牙本質形成於過去所謂的「牙間洞」內,這就很有趣啦!「洞」裡沒有有機物,反倒有新的牙本質形成,這意味者可能根本沒有所謂牙間的「洞」存在;再者,李博士在分析用同步輻射傅立葉轉換顯微紅外線形成的光譜後,又有另一個更重大的發現。

圖五是李博士所做的光譜分析,可說是精彩絕倫。先解說最上面一排的圖片 A – F:
- A 是在紅外線光源下掃描區域的光學影像,可以明顯看到所謂的「牙間洞」。
- B 是一般的光學影像,「牙間洞」更為明顯(按:同樣的樣本,在不同的光源下,所「看」到的影像會有所不同)。從影像 C 到影像 F,越是紅色的區域代表濃度越高,越是藍色代表濃度越低。
- C 為二氧化碳在 2345 cm-1 位置的分布,主要見於琺瑯層和少量在「牙間皺摺」。
- D 為碳酸磷灰石A 在 879 cm-1 的分布,存在於「牙間折摺」的球狀牙本質內。
- E 為碳酸磷灰石B 在 867 cm-1 的分布,存在於「牙間折摺」的球狀牙本質內。
- F 在 3000 – 2800 cm-1 之間的烷基,請注意,這些有機物殘留物,基本上不存在於所謂的「牙間洞」內,而是在四周的牙本質(牙小管)內。
- G 是傅立葉轉換紅外線光譜與解讀。
- H 為琺瑯質的傅立葉轉換紅外線光譜。
- I 為牙本質的傅立葉轉換紅外線光譜。
- J 為琺瑯層內的碳酸磷灰石A 和 碳酸磷灰B 解析圖。
- K 為保存在牙本質內的有機烷基。
到此為止,我們徹底打破了過去對於「牙間洞」的認知,進而提出新的正確名稱──在兩小鋸齒間的這個構造,應該稱為「牙間皺摺」。對於不是搞光譜分析的芸芸眾生來說,這些技術性說法,這些內容同天書般難以閱讀,看倌們也不必勉強自己一定得讀懂這部份,我只希望能在本文留下個人的心路歷程,讓子孫們知道,當年爺爺有幹過此等大事。
現在我來試著講講普通人的話,說明這些光譜掃描和分析的重要結果:
- 從 F 可以明顯看到,在過去所謂的牙間「洞」內,沒有看到有機殘留物存在,反倒是在牙本質內出現了烷基。
- 二氧化碳 (CO2)和牙齒化石有著很密切的關係──中生代比現在氣溫高上很多,南北極都沒有冰層覆蓋,大氣中的二氧化碳濃度更是現在的好幾倍。因此,溶解到地下水裡面的二氧化碳濃度高於現在,這些溶解於水中的二氧化碳與它和水所形成碳酸,在牙齒石化過程中滲入其中。但就如 C 所顯示的,二氧化碳只滲透到琺瑯層,加上少部分跑進「牙間皺摺」,並沒有擴展到牙本質區域內;換句話說,二氧化碳的侵入就到此處為止。
- 水中的碳酸成分跑進「牙間皺摺」區域裡面,並與磷灰石起了作用,產生兩種不同的碳酸磷灰石A 和 碳酸磷灰石B。
- 綜合以上兩點,可以看到二氧化碳和碳酸在石化過程中,扮演了一個非常有趣而獨特的作用:它們在琺瑯層和「牙間皺摺」等地方,形成「水泥覆蓋 (Cementing)」作用(水泥就是碳酸鈣),這個「覆蓋作用」或許就是讓牙本質內得以保存有機殘留物的重要原因!
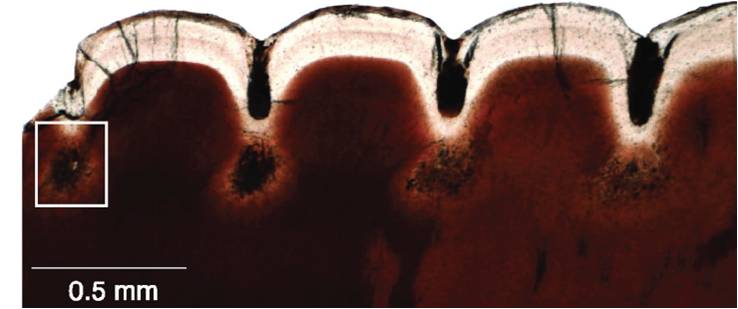
為了探究「牙間皺摺」的形成,克絲丁又做了許多切片,觀察尚未長出牙床的小鋸齒間;依據以前的說法,「牙間洞」是在牙齒使用過程中產生的,所以還沒長出來使用的牙齒,理論上應該不會有這些結構。然而克絲丁卻在許多尚未長出牙床的牙齒邊緣同樣看到了「牙間皺摺」(圖六),這更是壓垮老駱駝的致命一槍,徹底推翻了過去的「牙間洞」說法!
哈哈哈!雖然我們推翻的只是一個一般人根本不會關注的、非常學術的小小課題,但能在浩瀚學海中,留下了一點點小記錄,人生也就夠本啦!
原始論文
Developmental and evolutionary novelty in the serrated teeth of theropod dinosaurs
Scientific Reports. [July 28, 2015]





































