


- 編按:「生命啟始、萌芽於大約三千四百六十五『百萬年』前(也就是,近三十五億年前),註記在澳洲西部,所謂『頂角燧石』中的一群藍綠藻化石群。」(引述自推薦序)截至目前已知的 35 億年生物長河中,許多物種曾生活在這塊土地,卻有超過 99% 的物種都已經滅絕。我們想多了解牠們的故事,只能從現存的少少線索來拼湊。在《25種關鍵化石看生命的故事》中,作者挑選了演化史上重要的 25 種化石來介紹,不僅包含了化石帶給我們的演化故事,也包含了化石發現者、研究者的探索足跡。
- 大多數哺乳類都生活在陸地上,為什麼偏偏鯨豚生活在海中?如果說在海洋中生活的哺乳類,牠們的祖先來自於陸地,那牠們又是如何走回水中的呢?接著看看科學家如何從化石找答案,本文章摘錄自「走入水中 鯨豚類的起源:步鯨」。
鯨類起源的舊假說
當達爾文在 1859 年出版《物種起源》時,鯨是哺乳動物的事實,帶來了更有意思的重要性:鯨一定是某種回到水中的陸棲哺乳動物後代。在第一版的書裡,達爾文推測了這樣的演變是如何發生的。他重複了黑熊游泳時會張開嘴巴捕魚和獵食其他水中獵物的故事,這麼寫道:「我認為這非常清楚:透過天擇,熊類在構造與習性上都表現出愈來愈熟悉水性的歷程,隨著牠們的嘴巴愈來愈大,最後誕生了如怪物般的鯨。」不幸的是,達爾文的批評者不是很能接受這個理論,他也在後來版本的書中放棄了這個想法。
於是鯨類起源的這個問題,被拋到模糊地帶長達一個多世紀。雖然很多有大型原始鯨類的化石被收藏,但是幾乎沒有更原始的鯨類的良好化石出現;也就是半水生,或是完全陸棲,但有和鯨相似特徵的哺乳動物化石。
1966 年,芝加哥大學古生物學家雷.凡威倫(Leigh Van Valen)重新提起這個被忽略了數十載的問題。他指出,原始鯨類的頭骨內有巨大的鈍齒,形狀類似三角形的刀刃,和大型掠食性有蹄類哺乳動物中爪獸類群(mesonychids,發音 mez-o-NIK-ids)的牙齒非常相似。儘管中爪獸有蹄,但是牠們是肉食或雜食性動物,看起來像是狼和熊的混合體。
很多中爪獸體型非常龐大,頭骨上的口鼻部偏長,和原始鯨類非常相似。很快地,大家也開始注意到牠們和鯨類還有其他相似的特徵,於是中爪獸是鯨類祖先的這個論點,數十年來愈來愈獲得廣泛的接受。在我和羅伯特.修奇(Robert Schoch)合著一本關於有蹄哺乳動物的書時,這都還是一個廣受認可的觀點。
巴基斯坦欠債,跟鯨類化石研究有什麼關係?
在此同時,學界在 1970 與 80 年代開始認真尋找更原始的鯨類化石。當時巴基斯坦向美國國防部包商購買軍備,積欠數百萬美元,因此急於還債的巴基斯坦人透過數個補助基金會,讓美國人相對容易地從這些基金會獲得經費,在巴基斯坦進行古生物學研究。
除此之外,古生物學家知道重要的早期鯨類化石(大多是原始鯨類),最早是在 1920 年代由蓋.皮爾葛林姆(Guy Pilgrim)在印度西北方(現在的巴基斯坦)發現的;1970 年代的阿夏克.薩尼(Ashok Sahni)等人也在此發現其他化石。因此,許多古生物學家來到巴基斯坦,探索比挖出原始鯨類的地層更古老、代表近海或原本是淺海沉積物環境的地層。其中特別值得一提的是密西根大學的菲力普.金格瑞西(Philip Gingerich),以及東北俄亥俄州大學醫學院的漢斯.泰維生(Hans Thewissen)。
確實,巴基斯坦這筆意外又幸運的鉅額研究經費,使得古生物學家碰巧發現了鯨類實際上從陸棲哺乳動物演化而來的時間與地點:即,始新世早期(五千五百萬到四千八百萬年前)的熱帶、淺水的特提斯(Tethys)海道。特提斯是超級陸塊(supercontinent)的盤古大陸(Pangaea)和超級海洋(super-ocean)的古大西洋(Panthalassa)存在時代留下的遺跡,這條熱帶海道從地中海西部延伸到印尼,並在非洲板塊北移封閉了古地中海後被截斷。印度在始新世中期撞上亞洲腹地,更將剩下的特提斯海道一分為二。在特提斯海道消失之前,它的海岸線除了是最早回到水中的鯨的家之外,也是最早的海牛親戚(第二十一章)以及很多其他獨特哺乳動物(例如乳齒象、猿猴類以及蹄兔〔hyraxes〕)的家。
第一件重要的過渡型鯨類群化石,是巴基斯坦鯨(Pakicetus),由金格瑞西和同僚在 1983 年發表論文(圖 20.3)。雖然這件骨骼大部分看起來很像狼,有行走用的四足,但是頭骨卻很像原始鯨類的頭骨,包括大型鋸齒狀的三角形牙齒。牠的腦室很小、很原始,耳朵沒有在水中聽方位、偵測微弱聲納回聲的特殊特徵(但是牠有厚實的耳骨以及其他暗示水中聽覺能力的特徵)。巴基斯坦鯨發現於約五千萬年前的河流沉積層,暗示牠原本應該是陸棲動物,只是大部分的時間在水中生活。雖然牠的長腿和短小手掌、腳掌為了適應奔跑和跳躍而演化變異,但是四肢的骨頭格外粗壯,在水中可發揮穩定的壓艙效果,暗示牠應該是涉水型而不是游泳型的動物。

「步行游泳的鯨」

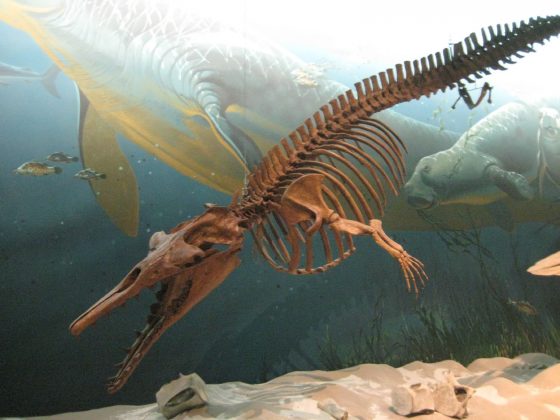
不過,最大的突破是在 1994 年,泰維生發表論文描述了步鯨(Ambulocetus natans,圖 20.4)。發現於巴基斯坦上庫達納組(Upper Kuldana Formation,約四千七百萬年前的近海沉積層)的步鯨化石,是真正介於鯨和陸棲哺乳動物之間,接近完整的動物骨骼,長度約三公尺,體型接近大型海獅,口鼻部長,有牙齒,和其他原始的鯨相似,也有明顯的三角形牙齒。牠的耳區還是不夠特化,也沒有聲波定位功能,但是步鯨可能會用這樣的耳朵聽陸地或水的振動。牠的四肢長且強壯,前指與後趾都很長,可能還有蹼。因此,這是一隻有四足的鯨類,可以走路也能游泳,故得此名。

這件鯨化石的脊椎研究發現,牠的背部能像水獺一樣波浪狀起伏,而不是像海豹或企鵝那樣用腳拍水。這種上下起伏的脊椎運動很像某些鯨,不過大部分的鯨軀幹都是僵硬的,只能用尾巴推進。

不過步鯨顯然不是游泳高手。泰維生認為,步鯨像鱷類般的身體比例,支持了牠是埋伏型掠食性動物的觀點——牠會動也不動地潛伏在水底,等到獵物接近時再衝出來獵捕食物。這些標本位於上庫達納組地層的近海海洋岩層中,暗示步鯨棲息在湖泊與河流的邊緣以及海岸。牙齒化石的化學分析,進一步證明步鯨可同時棲息於鹹水和淡水地區。

發現步鯨幾年後,另外一件幾乎完整的鯨類化石,達蘭鯨(Dalanistes,見圖 20.3)也挖掘出來了。和步鯨相同,達蘭鯨有功能完整的前肢與後肢,後肢趾頭更長,可以支撐有蹼的足。但是牠的口鼻部更長,更像鯨類,強壯的尾巴也是一樣。
在泰維生提出發現步鯨報告的 1994 年,金格瑞西和同僚也在巴基斯坦俾路支斯坦(Baluchistan)南部,約四千七百萬年前的地層中,發現另外一個更進階的過渡型鯨化石(見圖 20.3)。這件化石名為羅德侯鯨(Rodhocetus),是體型接近海豚的鯨,原鯨類群(protocetids)裡最有名的代表(不過這個類群裡的加伏特鯨〔Gaviacetus〕體長倒是超過五公尺)。

羅德侯鯨的頭骨比步鯨大許多,也更像鯨,有更長的口鼻部以及典型的原始鯨類牙齒。頸部的椎體顯示牠的頭和身體已經癒合成流線型的形狀,沒有明顯的頸部,不能獨立於軀幹轉動。牠四肢的長骨頭比步鯨和達蘭鯨短,前肢和後肢也比較短,顯示牠的腿比較小, 腳掌也有蹼(但還沒完全發展成鯨的鰭)。不過牠的髖骨和髖部椎體還是癒合在一起的,暗示牠依舊具備在陸上行走的能力。羅德侯鯨的骨架比例顯示,牠是靠腳掌游泳前進,後腿交替踢水往前推進,尾巴主要是舵的功能。
在羅德侯鯨之後,又發現了無數過渡型的鯨化石,例如泰克拉鯨(Takracetus)和蓋維歐鯨(Gaviocetus);牠們有愈來愈特化的前肢,發育成像鯨的鰭(見圖 20.3),後肢已經很小。牠們的身體也更像海豚,尾部的推進能力更進一步發展(和現代的海豚一樣),代表牠們可能也有水平的裂片。因為現在找到的過渡型鯨化石非常多,因此不可能判斷陸棲結束、真正的鯨出現的確切時間。從 1980 年還是毫無頭緒的謎團,到現在鯨起源於陸棲動物的發現,這是化石紀錄保留的最佳演化轉變過程。
本文摘自《25種關鍵化石看生命的故事:化石獵人與35億年的演化奇蹟》,臉譜出版。









































{kind=link}
{kind=link}