


文/Ent|古生物學博士生,科學松鼠會成員
雖說聖誕節是外來節日,但種種因素之下,國內接觸到的聖誕元素越來越多了。除了最典型的聖誕樹和聖誕老人之外,還有一個出場率越來越高的角色:紅鼻子馴鹿魯道夫(Rudolph the Red-Nosed Reindeer)。
魯道夫是一隻小鹿,誕生於 1939 年羅伯特.梅(Robert L. May)的童話故事裡[1]。故事說,小魯道夫因為長了一隻發光的紅色鼻子而遭到其他馴鹿的嘲笑,也沒鹿和他一起玩。但有一年聖誕前夜,起了大霧,聖誕老人看到了魯道夫的紅鼻子,於是請他作為馴鹿領隊照亮道路,從此得到了其他馴鹿的愛戴。
當然這個故事今天看起來可能政治上會有點奇怪——這裡暫不去討論。我們關心的,是這個更奇怪的發光紅鼻子。
光學:紅鼻子在平安夜有多好用?
達特茅斯大學人類學教授納撒尼爾.多米尼(Nathaniel J. Dominy)在一篇新發表的論文中討論了紅鼻子的光學效果[2]。
按照傳統,聖誕老人的鹿是馴鹿,最典型的特徵是有看起來奇怪的珊瑚狀角,也不是樹枝狀但也沒有連成一大片。北極馴鹿(Rangifer tarandus tarandus )的視力比起人類在短波段更好,能看到紫外線[3],這對生活在高緯度地區非常好用——因為這裡太陽常年高度很低,陽光要走更遠的距離才能抵達地面,因此遭受了嚴重散射,帶來大量藍光和紫外光[4]。而且,馴鹿眼睛裡用來反光的「照膜」,到了冬天也會從金黃色變成深藍色——可能是為了進一步增強視力[5]。


但這都是正常的冬天。要是起霧了,藍光反而最容易被霧氣擋住。此時聖誕老人的馴鹿靠自然光就會很難看見東西,跑都難跑,別提飛了。
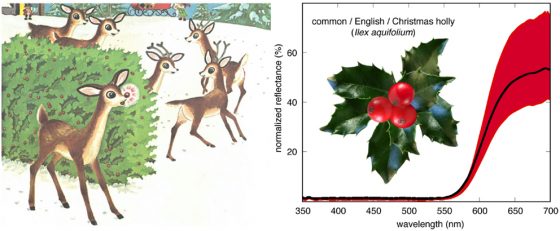
這時候魯道夫就派上用場了:紅光是最容易穿透霧氣的光,這是交通燈用紅色作為停止信號的一個重要原因。雖然我們無法直接測量它鼻子的波長,但故事裡描述了一個良好的近似物:同為聖誕節裝飾的冬青(Ilex aquifolium)所結的紅果子。它的紅光差不多正好是哺乳動物能看到的紅色的上限——因此,魯道夫鼻子作為照明燈,正好。

生理:紅鼻子是怎麼顯紅的?
其實羅伯特.梅提交他的草稿時,出版商一開始是拒絕的,說大紅鼻子容易讓人聯想到酒糟鼻。當然紅色只是因為面部毛細血管擴張,血流量增加所致,未必都是來自酗酒。如果魯道夫出於某種原因而鼻部血管發生改變,很容易變得非常紅。(不過發光的話可能就沒辦法了……,除非是某種附生的紅色熒光生物,此事稍後再提。)
但這樣會導致一個額外問題:散熱。馴鹿的鼻子本來已經血管發達了,再增大血流量的話,熱量損失會更加嚴重,令魯道夫面臨體溫過低的危險,從而難以愉快地和其他小伙伴在冰天雪地裡玩耍[6]。但照明又是平安夜導航必需的,所以他得有額外的卡路里來源——咦,所以這就是為什麼平安夜要擺一盤餅乾在桌上嗎?看來這不是給聖誕老人吃的,而是給魯道夫補充熱量的啊。
演化:為什麼會有紅色的鼻子?
好了,這才是真正難以解決、需要大開腦洞的問題。
雖說有照明需求,但聖誕老人顯然是偶然發現的魯道夫,並未進行過任何人為選育。簡單的鼻子偏紅可以是偶發變異,可是一個閃閃發光能夠照明的大紅鼻子,還伴隨著高昂的代價,這怎麼看都不太像是純粹的意外啊。自然選擇可以創立出各種奇蹟,但它需要時間和漸變,不可能孤零零蹦出一個魯道夫來的。
一個顯而易見的回答是返祖現象。馴鹿在歷史上可能經歷過一個需要紅鼻子的時期,後來這個需求消失了,別的馴鹿的紅鼻子也因高昂代價而消失,只有魯道夫因為一個突變而重新「啟動」了被關掉的紅色鼻子機制。但這也只是把問題推到了過去:歷史上的紅鼻子是在怎樣的環境壓力下誕生的呢?
更加不利的是,很少有什么生物專門演化出一個光源用於照明。照明的耗能極大,而效果卻很不好,需要在黑暗中活動的生物通常都會使用更好的夜視、嗅覺、迴聲、紅外視力或者別的什麼辦法。生物發光通常不是為了環境照明,而是用來做其他任務,比如最典型的傳遞信號[7]。

可是這麼一個只會發亮的大紅鼻子,耗能大、成本高,卻幾乎不能傳遞複雜信息,無非是告訴別人「這兒有東西」。這信號會被同類、獵物和捕食者一起看到,但馴鹿本來就是密集群居無需相互尋找,又是吃草的沒什麼吸引獵物的必要,徒增被捕食者吃掉的概率而已……。
等等,被捕食者吃掉?
是的,這紅鼻子不一定是對馴鹿自己有好處的東西,而可能是馴鹿被別的什麼生物操縱的結果,令其他生物受益。
生態:捕食與寄生的紅色惡意
寄生是自然界中極為普遍的現象,研究者估計全部生物裡有四分之一是寄生生活,就連極寒之地的馴鹿也不能免遭其擾。人們早就在馴鹿身上發現了各種寄生蟲,僅消化道寄生的線蟲就有 25 種。馴鹿鼻子當然也是有寄生蟲的,最常見的物種為 Linguatula arctica(鼻竇),Cephenemyia trompe(鼻腔和喉),以及 Elaphostrongylus(肺部但常沿呼吸道蔓延)[8]。
寄生生物操縱宿主也是很常見的現象,感冒病毒令人打噴嚏就是一個例子:讓病毒通過飛沫傳播開來。有些寄生蟲的生活史很複雜,必須讓自己的宿主被別的東西吃掉,於是它就會想辦法讓宿主更容易被吃掉。比如某些螞蟻會被寄生蟲驅使而跑到葉片頂端,更容易被草食動物一口吞[9] ;而有些魚類被寄生之後則會浮到水面肚皮上翻,更容易被水鳥發現並吃掉[10]。
而魯道夫的紅鼻子,也許就是這樣一種寄生蟲在發光,為了讓自己沿食物鏈傳播下去,而以刺穿濃霧的耀眼紅色指引著捕食者——比如說,曾生活在北方地區,因氣候變化和人類獵殺在一萬年前剛剛滅絕的劍齒虎(Smilodon)。

浪漫地假想一下,聖誕節可能其實是人類和紅鼻子馴鹿結下的古老互助。數萬年前的人類憑藉火和矛擊退劍齒虎,令馴鹿得以安全;而鹿群則在每年冬至時節為人類帶來禮物作為報答,領頭的魯道夫以鼻子的紅光象徵古老的約定。所有其他的聖誕神話也許都是這一契約的附生產物,源自一種操縱宿主的寄生蟲……。
而劍齒虎的遺產可能也沒有徹底消失。想想你家的貓咪,下次用激光筆耍得它團團轉的時候,你或許就能理解它為何痴迷於那一星紅色的光芒了。
- PS:雖然原理部分是科學的,所有引用文獻也都是真實的,但紅鼻子魯道夫是不存在的生物,請不要忘記這一點 _(:з」∠)_
本文來源於果殼網(微信公眾號:Guokr42),編輯:窗敲雨。本文禁止二次轉載,如需轉載請聯繫 sns@guokr.com。
參考文獻
- May, RL 1939. Rudolph the Red-Nosed Reindeer. Chicago, IL: Montgomery Ward.
- Dominy, Nathaniel 2015. Reindeer Vision Explains the Benefits of a Glowing Nose. Front Young Minds. 3:18. doi: 10.3389/frym.2015.00018
- Hogg, C., Neveu, M., Stokkan, K.-A., Folkow, L., Cottrill, P., Douglas, R., et al. 2011. Arctic reindeer extend their visual range into the ultraviolet. J. Exp. Biol. 214:2014–9. doi: 10.1242/jeb.053553
- Tyler, NJC, Jeffery, G., Hogg, CR, and Stokkan, K.-A. 2014. Ultraviolet vision may enhance the ability of reindeer to discriminate plants in snow. Arctic 67:159–66. doi: 10.14430/arctic4381
- Stokkan, K.-A., Folkow, L., Dukes, J., Neveu, M., Hogg, C., Siefken, S., et al. 2013. Shifting mirrors: adaptive changes in retinal reflections to winter darkness in Arctic reindeer. Proc. R. Soc. Lond. B 280:20132451. doi: 10.1098/rspb.2013.2451
- van der Hoven, B., Klijn, E., van Genderen, M., Schaftenaar, W., de Vogel, LL, van Duijn, D., et al. 2012. Microcirculatory investigations of nasal mucosa in reindeer Rangifer tarandus (Mammalia , Artiodactyla, Cervidae): Rudolph’s nose was overheated. Deinsea 15:37–46.
- Haddock, Steven HD; Moline, Mark A.; Case, James F. 2010. “Bioluminescence in the Sea”. Annual Review of Marine Science 2: 443–493.
- Halvorsen, Odd 1986. Epidemiology of reindeer parasites. Parasitology today, 2:12.
-
Marikovsky, PI 1962. On some features of behavior of the antsFormica rufa L. infected with fungous disease.Insectes Sociaux, 1962
- Kevin D. Lafferty and A. Kimo Morris 1996. Altered Behavior of Parasitized Killifish Increases Susceptibility to Predation by Bird Final Hosts. Ecology 77:1390–1397.




































{kind=link}
.jpg){kind=link}