
對於年輕人來說,我相信「深水炸彈」一詞並不會陌生,因為這近乎是每一個狂歡派對裡的必需品。但對於埋藏在深海裡的炸彈,大家又有沒有想過我們如何找出來?
這些未爆炸的軍備,我們稱之為 Unexploded Ordnance(簡稱 UXO),有可能是水雷,有可能是深水炸彈,也有可能是導彈。它們多數是第一次或第二次世界大戰遺留下來的產品,受到多年來沉積(即水流在流速減慢時,所挾帶的砂石、塵土等沉淀堆積起來)的影響,令它們埋藏在海床以下的地方。跟據 Euronews 的估計,單單在波羅的海亦有超過 30 萬的 UXO 埋在那裡。
你也許會問,既然都已經埋藏了,何況我們仍然要處理他們?這是因為我們會在海底裡鋪設電欖、水管、天然氣輸送管等輸送系統,假如鑽探過程中不小心觸碰了它們已產生意外,或是在完成工程某一天突然爆炸而令輸電系統中斷,後果可真是不堪設想。因此,最理想的方法便是把他們全部找出來並繞道而行,或是安排專家把他們處理。
真正的大海撈針:用磁場把 UXO 吸出來!
要找到這些 UXO,最容易的方法便是使用金屬探測的方法,但由於普遍的金屬探測器的探測範圍是不超過 2 公尺的,我們很難把探測器貼近凹凸不平的水底前行(這大大增加了磨損探測器的風險),因此我們會選擇較間接的方法:磁強計(Magnetometer)。由於大部份的彈藥外層是用鐵形成的,而鐵是對磁非常敏感的,因此我們能夠在較遠的範圍便能察覺他們的存在。當在外勤工作,我們會以兩個磁強計為一組去作探測,令我們更準備知道其實際位置及大小。讓我們看看以下例子:
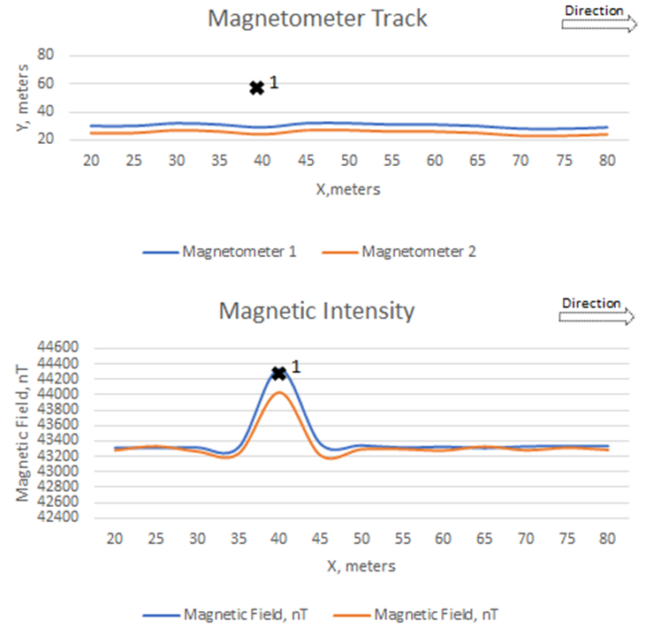
在圖 1 裡,假設我們知道標記「1」是一個 UXO 的位置,上圖的平行線為磁強計由左至右的移動路線,下圖為磁場沿路的變化。我們可以看見,當若果沒有任何金屬物件存在的話,兩個磁強計量度的數是相近的,亦即是該環境本身的磁場。但在 UXO 的附近,我們可以看到明顯的變化。藍色線代表航行路線的左方磁強計的量度值,燈色線代表右方,由於磁場強度會隨著距離而減少,因此很明顯這一個 UXO 的位置更接近藍色線,亦即是航線的上方。
我們可以透過兩者的差距估計其位置及大小,但為了確保其真實性,我們亦會在附近再次航行,假如也有磁場變異,這便是一個不會移動的金屬物品(撇除了船、飄浮中的海洋垃圾等的可能性)。
排除法:用側掃聲納窺探看不見的海底!
正如上文提要,磁場變異所告訴我們的,只是金屬物品的位置,但它亦有可能不是炸彈,也有可能不是埋在海床下,因此我們也會使用其他科學方法去驗證。其中一個便是側掃聲納(Side Scan Sonar) ,透過聲波反射的原理,我們可以看到海床的影像。假如海床是乾淨的,聲波傳送及接收的時間是一樣的,因此我們可以看到連續的晝面。但假如有異物在水中間或海床上,聲波便會被折射而形成黑影。讓我們看看以下例子:

看看圖 2。燈色的部份是海床的晝面,中間白色的部份是船的航道,亦是側掃聲納的盲點,而黑色的部份則是有物件在海床上方而形成的聲波折射,讓我們能夠清楚看見它們的形狀。有時候我們亦會看到一些海洋垃圾,如車胎、單車等,而在上圖的左上方,我們相信是一些棄置的工業廢料。
當然你也可以爭論,在圖左上方的物件有機會不是死物,而是一種未知海洋生物,因此我們也會進行多次的側掃聲納,如果在同一位置並不能再看到它,那麼這是生物的機率便很高。假如在磁場異變的位置側掃聲納沒有探測到任何物件,這進一步證明其 UXO 的可能性。但假如有黑影在上方,我們也會透過黑影分析其大小是否吻合,並會憑經驗分析該物品會否存在金屬。
此外,在看側掃聲納,我們也很重視在磁場異變的位置附近有沒有刮痕,因為形成刮痕的原因多數是船上作業頻繁的地方,有機會是漁船拖網的地點,也有機會是大船拋錨起錨的地方,而這些動作均有機會接觸或移動了這些潛在的 UXO,產生危機。因此,這些地方都會是我們首要處理的地方。
筆者按:假如大家想看看其他用側掃聲納發現的東西,如沉船、飛機等,可以到這裡觀看。
萬無一失:Mission Completed !
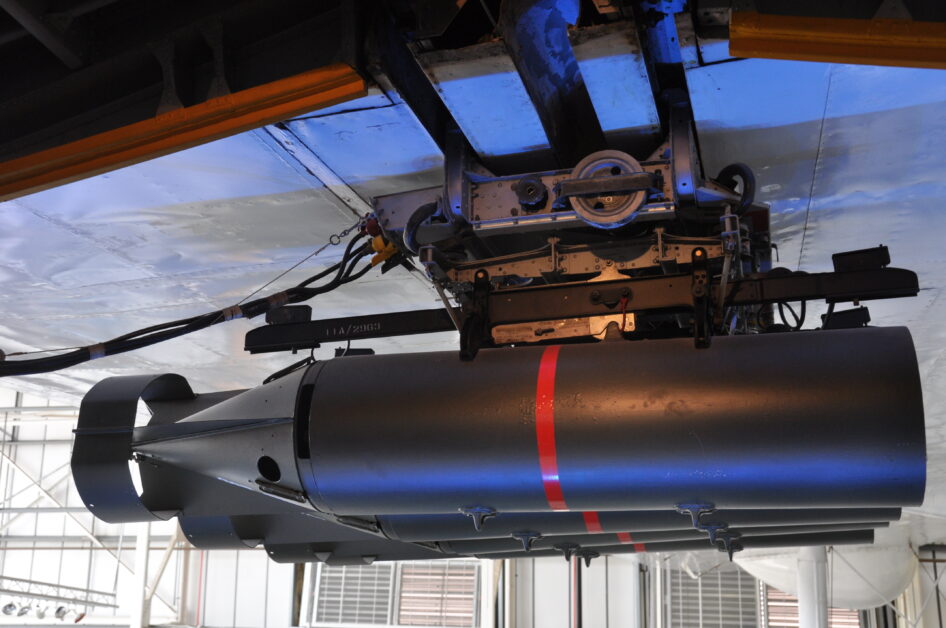
當然,在取得數據時,我們也要儘可能減低人為因素而形成的影響。舉個例子,我們要確保磁強計遠離測量船,以免船上的儀器影響了磁強計。因此,我們並不會把磁強計綁在船底,而是把它們用纜索綁在船尾數十米以外的地方拖行。
另外,我們也要確保測量船要以均速航行,以確保所有數據都是一致的。最後,我們也要確保船上的 GPS 系統準確無誤,否則所有有可能是 UXO 的位置都是錯誤的。
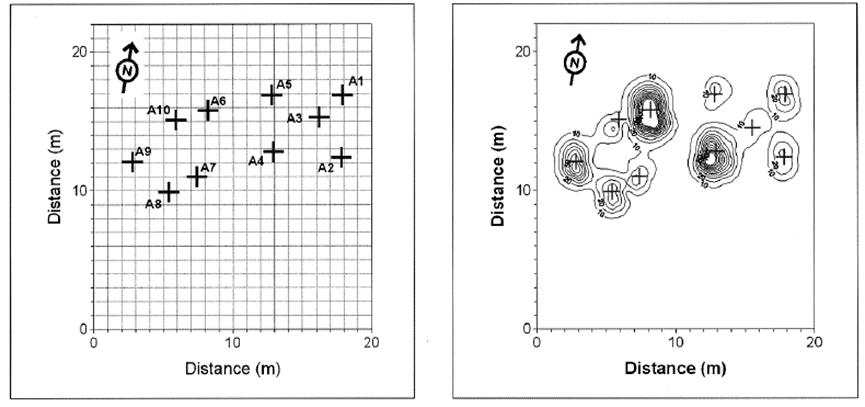
完成以上的工序後,我們便會製作磁梯度圖(Magnetic Gradient Map),把剩餘下來的磁場變置點用其強度及大小表示出來,正如圖 3,再交給拆彈專家們處理。他們便會跟據他們的專業知識,加上該海岸的戰爭歷史,對比當時有可能參戰的國家、使用的武器及其金屬含量以找出存在的炸彈來處理。
要知道這些 UXO,單單在 2015 年在世界各地亦奪去了超過 6000 人的性命,因此這個科學命題可真是不容忽視!
延伸閱讀:
參考資料:
- Salem, A., Hamada, T., Asahina, J. K., & Ushijima, K. (2005). Detection of unexploded ordnance (UXO) using marine magnetic gradiometer data. Exploration Geophysics, 36(1), 97–103.
- Han, S., Rong, X., Bian, L., Zhong, M., & Zhang, L. (2019). The application of magnetometers and electromagnetic induction sensors in UXO detection. E3S Web of Conferences, 131, 01045.
- Image scans gallery. EdgeTech. (n.d.). Retrieved January 5, 2022, from https://www.edgetech.com/underwater-technology-gallery/
- Grothues, T. M., Newhall, A. E., Lynch, J. F., Vogel, K. S., & Gawarkiewicz, G. G. (2017). High-frequency side-scan sonar fish reconnaissance by autonomous underwater vehicles. Canadian Journal of Fisheries and Aquatic Sciences, 74(2), 240–255.
本文亦刊載於作者部落格 Else Production ,歡迎查閱及留言







































{kind=link}