

- 作者 / 張逸屏|雅文基金會聽語科學研究中心 研究員
聽到「人工電子耳」這五個字你會想到什麼呢?既是「人工」又是「電子」的耳朵,大概就像義肢或義眼吧,會有著與原器官相似的外型,若一不小心開啟妄想小宇宙,各種以機器人為題材的科幻電影馬上浮現……,先等一下!這誤會可大了!
幫助聽損者重拾聽力的高科技
人工電子耳其實是聽力損失者在助聽器之外,可選擇使用的聽覺輔具之一。「聽見聲音」對一般聽力正常的人來說,是在出生前就已經開始累積的感官經驗,胎兒的聽覺系統在孕期 6 個月左右就發育完成(Graven & Browne, 2008),而聽覺也是人們離世時最後消失的感官功能(Blundon, Gallagher, & Ward, 2020),可說是在五感當中陪伴人一生最久的感官。然而,有許多人因為各種先天或後天的因素而有程度不同的聽力損失。隨著科技發達,要重拾聽覺已不再是遙不可及的事。
就像是大部分長輩因老化而造成的重聽,程度相對較輕,可以透過佩戴助聽器矯正聽力;但重度或極重度以上的聽損,採用助聽器這種放大聲音的方式很可能已無法滿足需求。這時,植入人工電子耳則是另一種可以恢復聽覺的選擇。
人工電子耳如何產生聽覺?

人工電子耳的原文為 cochlear implant,也有人稱為「人工耳蝸」。從圖一中可以看到,醫生透過手術將電極(Electrode)植入到內耳的耳蝸當中,而佩戴在耳朵上的聲音處理器(Sound processor)將接收到的聲音訊號,依照音量和頻率分布做計算、並轉換為電訊號,再透過佩戴在頭上的線圈,經電磁感應傳送到植入體(Internal implant),越過受損的內耳,透過電極以電流刺激聽神經(Hearing nerve)而產生聽覺(Loizou, 1999)。所以人工電子耳的外型和耳朵並不相似,而是有一部份佩戴在耳朵上、一部份植入在頭部內的。近年更有一體成形機(可參考網頁),佩戴在外部的所有元件都組合在一起,佩戴起來更加輕巧。
當代人工電子耳的發展可回溯到 1960 年代,一開始發展時許多學者其實並不看好,認為只透過少數幾個電極,不可能將複雜的聲音訊號與特性真實地呈現,並傳遞給大腦詮釋為有意義的訊息。然而經過研發與臨床試驗,許多植入電子耳的聽損者可以有好的成效(Eshraghi et al., 2012),植入後一年時測驗句子聽辨,平均正確率可達到約 90%(Wilson & Dorman, 2008)。美國 FDA(U.S. Food and Drug Administration;相當於衛福部食藥署)也分別在 1980 年和 2000 年正式通過成人和 1 歲以上孩子植入電子耳,至 2019 年底全球登記在案的電子耳數量超過 73 萬(NIDCD, 2021)。
原來耳蝸就像鋼琴鍵盤
雖然電子耳確實能將重度聽損者帶回有聲世界,一開始不看好的學者,其實也對電子耳恢復聽覺的表現感到驚嘆。聲音的訊號十分複雜,究竟是如何只透過 16〜22 個電極,就完成了傳遞聲音訊號的任務呢?要回答這個問題,就要了解聲音的兩大特性、以及分別如何用電流來呈現。
聲音的兩大特性就是「音量大小」及「頻率高低」,在電子耳的訊號處理中,音量可用電流的大小來呈現,而頻率則可以利用電極在耳蝸中的位置來呈現,其原理是因為人的耳蝸原本就有「音調排列(tonotopic)」的特性。
人的耳蝸長度大約 3.5 公分,形狀有點像蝸牛殼(所以叫耳蝸嘛!),盤繞大約 2 圈半。所謂的音調排列,就如同圖二所示,若想像將耳蝸拉直後,耳蝸的底部負責高頻的聲音、頂端則負責低頻的聲音,就像是對應鋼琴鍵盤上按照聲音頻率高低而排列的琴鍵。因此,聲音訊號並不是全部一起送到所有的電極,而是聲音處理器會將聲音分解為數個不同的頻段,再分別送到對應的電極。

在耳蝸植入的電極數量,決定聲音處理器會將輸入的聲音分解為幾個頻段。例如,澳洲電子耳大廠 Cochlear® 公司的 Neucleus 電子耳,一般來說會在耳蝸內植入 22 個電極,那麼聲音處理器就會將聲波分解為 22 個頻段,再以電流脈衝(pulses)進行編碼,並分別去刺激對應的電極。也就是說,大約在 100-300 Hz 這個頻率帶的聲音,在進行編碼後就會被傳送到植入在耳蝸最頂端的電極;而大約在 6000-8000 Hz 這個頻率帶的聲音,則會透過耳蝸最底端的電極來刺激聽神經[註1]。
上述說明的是理論上最理想的狀況,然而在實際上,可能因組織構造、聽損本身造成的神經存活狀態、電極間電流的互相干擾(此為電流本身之特性)等種種原因,造成呈現特定聲音頻率帶的電脈衝並不是(只)刺激原本所設定、負責某頻段的聽神經,使得聲音有失真和扭曲的現象。所幸人類的大腦具有可塑性,在植入電子耳後,透過聽能訓練和日常不斷累積聆聽經驗,許多電子耳使用者都能逐漸適應、並提升聽辨的表現。
電極數越多、一定聽得越好?
那麼,透過電子耳的聲音聽起來到底是如何呢?在網路上有不少電子耳聲音模擬[註2]的影音可以參考,這裡介紹美國達拉斯大學提供的網頁(Loizou, n.d.)。其中提供了不同頻道數(channel = 頻道;概念上相當於電極數)、以及不同植入深度的聲音模擬。以頻道數來說,若逐個試聽,會發現愈多頻道時語音會愈清楚。不過受限於耳蝸體積、電極相近時會互相干擾等因素,植入的電極數能增加數量有限,如前述一般是植入 16 – 22 個電極。此外,雖然在理論上愈多頻道(電極)聲音會愈清晰,但由於各種複雜的影響因素[註3],實際上這樣的關係並不是絕對的,尤其不同的電子耳產品間、或不同個案間,不能直接以電極數來評斷聲音/聆聽品質的優劣。
植入深度也是影響因素
除了頻道數外,網站上還提供了不同植入深度的模擬。電子耳的植入手術中,是將電極從耳蝸的底端插入,理想的植入深度是大約 25 公釐。這樣的情況下,特定頻率帶的聲音就可以透過對應的電極,去刺激負責那段頻率的聽神經。如果植入的深度不夠,代表電極的位置是比較偏底端的,根據前面提到的音調排列特性,特定頻率帶的聲音就會被送往較接近底端、偏向較高頻率的電極和聽神經了。
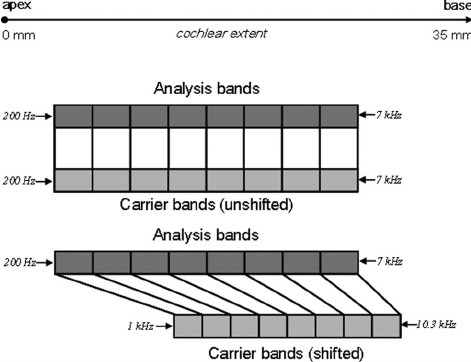
植入深度不足的情況可參考圖三,圖的上半部示意理想植入深度,因此聲音處理器的聲音分解(Analysis bands)和刺激電極在耳蝸的分布(Carrier bands)是能夠完全對應的。而圖三的下半部,則是植入深度極端不足(16 公釐)的示意圖。在這情況下,大約 200-360 Hz 這段頻率的聲音(Analysis bands最左邊的小方塊),會被傳送到負責大約 1000-1400 Hz 這段頻率帶的電極及聽神經(Carrier bands 最左邊的小方塊),因此聲音聽起來會變得很高、很尖很細,而有扭曲的現象。你可以在聲音模擬的網站試聽看看,植入深度愈淺(22 mm)時,聲音聽起來會愈尖。
透過訓練,讓大腦適應電子耳的聲音
除此之外,你可能也會發現,若先聽過原始的語音(original speech/original sentence)、再聽模擬的聲音,會發現聽起來變得容易理解得多,尤其是參數條件較好的模擬語音,也就是較多頻道、或植入深度較深的模擬語音。如果反覆再多聽幾次,甚至會發現,即使是頻道數較少、植入深度較淺的模擬語音,也不像第一次聽到時感覺那麼難以辨識了。這樣反覆練習聆聽的過程,可說是電子耳術後聽能復健的縮影。
聽損者在植入電子耳後,對於大腦來說,並無法馬上就能詮釋透過電刺激所傳送的訊號,而是要透過不斷地練習,包括正式的聽能復健、以及日常生活中持續累積聆聽經驗,才能將手術前透過聲波所理解的各種聲音,再重新與電刺激所呈現的聲音進行配對。
電子耳術後復健是關鍵
電子耳植入後是否能成功地透過聽理解日常對話,背後有許多的影響因素,其中關鍵的兩點,是植入前是否有聽能和語言的基礎,以及植入後的聽能復健與日常練習[註4]。若植入前有聽語基礎,像是學語後失聰的成人、或植入前有穩定佩戴助聽器的聆聽經驗等,因為已具備語言知識和語音聆聽經驗,大腦的聽覺區有持續地接收刺激,所以在植入後,可以在既有的聽語基礎上,去建構更好的聽能技巧。而植入後的聽能復健與日常練習更是至關重要,透過不斷地練習,並配合聽語專業人員的復健課程,讓大腦可塑性發揮作用,去辨識進而理解透過電子耳傳遞的語音。
2017 年電子耳納入健保給付後,許多醫生和家長都會積極地為聽損孩子植入電子耳。然而,這裡要提醒的是,雖然電子耳確實有許多成功的案例,但在決定手術之前,仍應審慎評估風險與成效,並了解術後復健所需投入的時間與心力,才能在植入後達到最好的聆聽成效。
註解
- 註 1:本文所說明的聲音處理方式是經典的策略,隨著各家廠商研發新技術,聲音訊號處理的方式會有所變化,但在概念上大致相似。
- 註 2:電子耳聲音模擬呈現的仍然是聲波,與電子耳透過電刺激所傳遞的方式有本質上的不同,所以並無法真實呈現電子耳使用者聆聽的感受。聲音模擬的真正用途是在學術研究與技術研發,讓學者和電子耳公司,能透過改變模擬的參數進行實驗,來找尋更好的電子耳聲音處理策略。
- 註 3:影響因素包括:先天內耳構造、電極間的電流交互作用、耳蝸死區、聽神經存活率、電子耳調頻圖的各項參數……
- 註 4:植入後的另一項關鍵因素是定期調頻(mapping;另一譯名為「調機」),即聽力師依個案需求,調整電子耳聲音處理策略的各項參數及電流量,一開始植入後需較密集地調頻,應配合聽力師建議定期進行,穩定後亦應每年調頻一次。受限於篇幅本文未深入說明。
參考資料:
- Blundon, E. G., Gallagher, R. E., & Ward, L. M. (2020). Electrophysiological evidence of preserved hearing at the end of life. Scientific reports, 10(1), 1-13.
- Eshraghi, A. A., Nazarian, R., Telischi, F. F., Rajguru, S. M., Truy, E., & Gupta, C. (2012). The cochlear implant: historical aspects and future prospects. The Anatomical Record: Advances in Integrative Anatomy and Evolutionary Biology, 295(11), 1967-1980.
- Graven, S. N., & Browne, J. V. (2008). Auditory development in the fetus and infant. Newborn and infant nursing reviews, 8(4), 187-193.
- Loizou, P. C. (n.d.). Cochlear implant audio demos. Retrieved from https://ecs.utdallas.edu/loizou/cimplants/cdemos.htm
- Loizou, P. C. (1999). Introduction to cochlear implants. IEEE Engineering in Medicine and Biology Magazine, 18(1), 32-42.
- NIDCD (National Institute on Deafness and Other Communication Disorders) (2021). Cochlear Implants. NIH Publication No. 00-4798. Retrieved from https://www.nidcd.nih.gov/health/cochlear-implants
- Nogaki, G., Fu, Q. J., & Galvin III, J. J. (2007). The effect of training rate on recognition of spectrally shifted speech. Ear and hearing, 28(2), 132.
- Wilson, B. S., & Dorman, M. F. (2008). Cochlear implants: a remarkable past and a brilliant future. Hearing research, 242(1-2), 3-21.



































{kind=link}
{kind=link}