

編按:《學生為什麼不喜歡上學?》這本書以認知心理學研究成果為根基,歸納出大腦如何學習和記憶,並提供了教師如何應用這些認知原則於教學現場的方法。
心智模型長這樣,原來我是如此思考!
稍微瞭解一下思考運作的方式,有助於你瞭解思考困難的原因,這樣一來就能讓你瞭解如何幫助學生把思考變容易,也就能讓學生更樂於上學。
我們從非常簡單的心智模型說起:
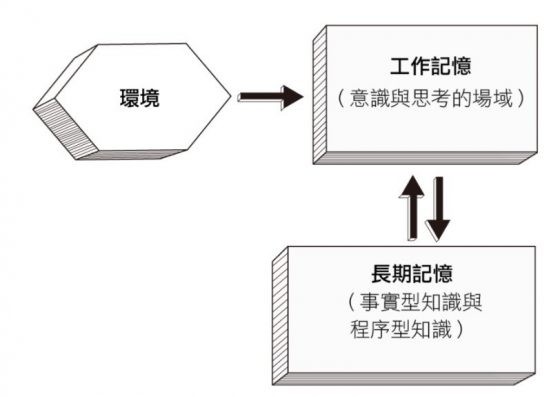
圖 1-6 左邊是環境,充滿了可見可聞的事物、待解決的問題等等。右邊是你心智的一部分,科學家稱之為工作記憶,現階段暫且將其等同於意識,承載你目前正在思考的內容。從環境指向工作記憶的箭頭,表示工作記憶是你大腦內意識到周遭環境的區塊:一道光線落在佈滿灰塵桌面的景象、狗在遠方吠叫的聲音等等。當然你也同時注意到目前不存在環境中的事物;舉例來說,你可以回想起媽媽的聲音,即使她不在房間裡(或其實已不在人世)。
長期記憶是儲存你對於世界的事實型知識的巨大倉庫:瓢蟲有圓點、你最愛的冰淇淋口味是巧克力、你家三歲幼兒昨天突然迸出「金桔」 (kumquats)一詞讓你又驚又喜等等。事實型知識可能是抽象的,比如三角形是三個邊的封閉圖形,還有你對狗一般外型的瞭解。
所有長期記憶中的訊息都存在於意識之外,靜靜蟄伏,直到被需要,這才進入工作記憶中,成為意識。舉例來說,要是我問你:「北極熊是什麼顏色?」你幾乎會立刻回答「白色」。這個訊息三十秒前還在長期記憶中,直到我丟出問題,你才會意識到它的存在,讓訊息變得與目前思緒有關,於是進入工作記憶中。
來試試解題吧,體驗在工作記憶中組合訊息
當你用新的方式組合訊息(來自於環境和長期記憶),思考於焉產生。組合訊息的場域就是工作記憶。為了讓你感受此一過程,請閱讀圖 1-7 所描述的問題,並試著回答(重點倒不是解題,而是體會思考和工作記憶為何)。
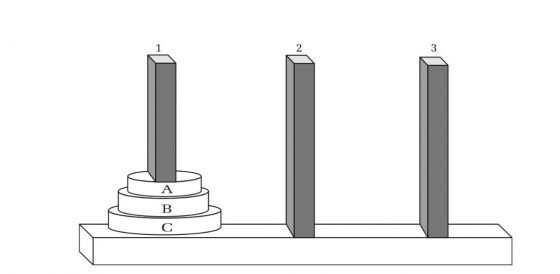
本圖描繪有三根方樁的遊戲臺。最左邊的方樁上套著三塊面積由小到大的圓盤。題目要你把三塊園盤從最左邊的方樁移到最右邊的方樁,但移動規則有二:一次只能移動一塊圓盤,而且不能把大圓盤放在小圓盤之上。
稍微想一下,就能解出這個題目, 此時重點在於體驗工作記憶被問題占據的感覺:你一開始從環境裡汲取訊息——遊戲臺的規則與配置——然後想像移動圓盤來達到目標。
在工作記憶內,你必須保持目前在謎題的狀態——圓盤的位置——並想像且評估可能的移動方式。同時你必須記住哪些移動才符合規則,如圖 1-8 所示。
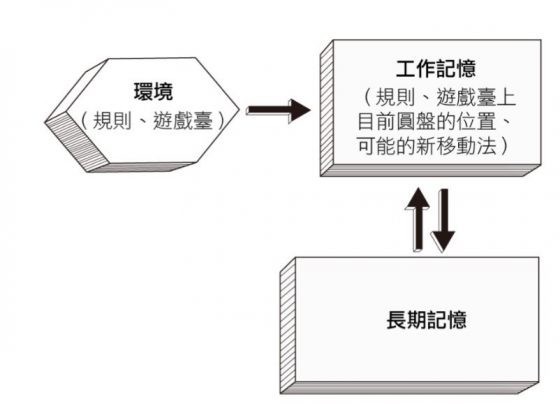
對於思考的描述讓我們清楚知道,在工作記憶裡如何組合及重新安排概念,是成功思考的關鍵。舉例來說,在圓盤與方樁問題中,你怎麼知道要把圓盤移到哪裡?如果你沒有見過這個問題,你或許覺得自己像在瞎猜。如圖 1-8 所示,長期記憶裡並沒有任何訊息來引導你。
拆解計算的思考過程,中間需提取長題記憶
但如果你曾看過這類似問題,那麼長期記憶中很有可能有如何解題的訊息,即使訊息並不是那麼的簡單明瞭。
比方說,試著心算這道數學題:
18 × 7
你知道怎麼做這道題。我有信心你的心算步驟和以下順序相去不遠:
- 用 8 乘以 7。
- 從長期記憶中提取 8×7=56 的事實。
- 記住 6 是答案的一部分,然後把 5 進位。
- 用 7 乘以 1。
- 從長期記憶中提取 7×1=7 的事實。
- 把進位的 5 和 7 相加。
- 從長期記憶中提取 5+7=12 的事實。
- 寫下 12,後面再寫 6。
- 答案是 126。
你的長期記憶不僅包含事實型訊息,如北極熊的顏色與 8×7 的數值,還包含我們所謂的程序型知識,也就是進行工作時必備的心智程序知識。如果思考是在工作記憶中組合訊息,那麼程序型知識就是組合內容與時序的清單,就像是一份處方,用以完成某種類型的思考。你可能儲存處理某些事務的程序,如計算三角形面積、用 Windows 複製電腦檔案,或從家裡開車到公司。

圖/pixabay
很顯然地,長期記憶中儲存適當的程序有助於我們思考。也因如此,解上述的數學題很容易,但解圓盤與方樁問題卻有難度。那麼事實型訊息也能幫助你思考嗎?答案是肯定的,而且還以好幾種不同的方式,這點在第二章中會討論。現階段請注意解數學題需要提取事實型訊息,如 8×7=56 這樣的事實。我說過,思考需要在工作記憶中組合訊息,通常若環境中提供的訊息不足以解決問題,你必須用來自長期記憶的訊息來補充。
當工作記憶的空間被塞爆,思考就卡住了
思考還有最後一個必要條件。舉例說明最易理解,請看下列問題:
在某些喜馬拉雅村莊的旅店裡,有一種講究的茶道儀式。參與儀式者包含一位主人和兩位客人,不多也不少。客人抵達後在桌邊入座,主人會為他們表演三道規矩。這些規矩按照喜馬拉雅人認為的尊貴程度來排列,分別是:點火、搧風、倒茶。儀式進行時,在場者任何一位都能問其他人:「可敬的先生,能夠讓我為您進行這個繁複的規矩嗎?」不過,一個人只能向另一人詢問比他正在進行的規矩中尊貴程度最低的。此外,如果一人正在進行某一規矩,那他就不能要求比他已經做過尊貴程度最低的規矩更高階的規矩。習俗規定,茶道儀式結束之時,所有的規矩都會從主人移轉到客人中最年長者。請問該怎麼進行呢?
讀完這個問題,你的第一個反應可能是「啊?」你可能會覺得必須多讀幾遍才能懂,更不用說著手解題。問題看起來很棘手,因為你的工作記憶沒有足夠空間來容納所有問題的層面。工作記憶空間有限,所以工作記憶太擁擠時,思考變得更為困難。
茶道問題其實和圖 1-7 的圓盤方樁問題是一樣的。主人和兩位客人就像三根方樁,而規矩就是要在這當中移動的三塊圓盤,如圖 1-9(很少人看出這個類比以及類比對於教育的重要,這點會在第四章中提到)。
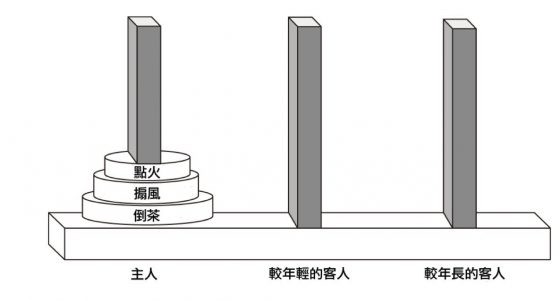
這個版本的問題顯得困難許多,因為在圖 1-7 中清楚明瞭的內容現在必須憑空想像。舉例來說,圖 1-7 提供了方樁的圖片,有助於我們在思考移動步驟時,在心裡保有圓盤的影像。問題的規則占據許多工作記憶的空間,使得思考過程受阻,解題變得困難。
成功的思考有四大因素
總之,成功的思考仰賴四大因素:來自環境的訊息、長期記憶裡的事實、長期記憶裡的程序,以及工作記憶的空間。任何一個上述因素不夠,思考就有可能失敗。
讓我總結一下這一章。人類心智並沒有特別適合思考;思考很緩慢、費力、不可靠。因此,大多數情況下引導人類行動的,並非深思熟慮;實際上人們反而是仰賴記憶,遵循過去採取過的行動。
不過,人們覺得成功的思考有樂趣、喜歡解決問題、瞭解新的概念等等。因此,人們會找機會思考,但這麼做是有選擇性的;我們選擇那些有點難度,但看似有機會解決的問題,因為這些問題能帶來愉悅及滿足感。要解決問題,思考者需具備來自環境的足夠訊息、工作記憶的空間以及長期記憶中不可或缺的事實與程序。
本文摘自《學生為什麼不喜歡上學?:認知心理學家解開大腦學習的運作結構,原來大腦喜歡這樣學》,久石文化,2018 年 12 月出版。



































{kind=link}