

時序進入盛夏,台灣準備迎接2013年的颱風季。過去每次颱風來襲,總會伴隨大量的山崩、土石流以及河床淤積,國土變動幅度相當劇烈。因此,災後進行受災前後地表差異的調查十分重要,需盡快找出受災地點,並進行疏濬河道、邊坡防治等工程,避免下一次更嚴重的災害。
在眾多地表觀測的方式中,遙測空載雷射測距技術(light detection and ranging, LiDAR)又稱光達,擁有觀測迅速、高準確度、能同時觀察地表與地上物體等等的優勢,是近年用來觀測大面積國土變遷、紀錄地形地貌的國際趨勢。
LiDAR使用飛機裝載雷測觀測器具,利用紅外線進行頻率每秒20到40萬次的雷射觀測,藉由雷射反射時間可以計算出觀測儀器與地表的距離,再經過GPS的定位,便可以計算出地表觀測點的高程與位置。
此外,LiDAR最大的優勢便在於透過回波的時間差異,能同時觀測地表上的物體。當雷射光束碰到建築或樹木的頂部,會傳回第1次回波,其餘未被反射的光束繼續行進,直到地表傳回最後一次回波。藉由資料處理,便能將這些地上物的回波排除,獲得地表高程。
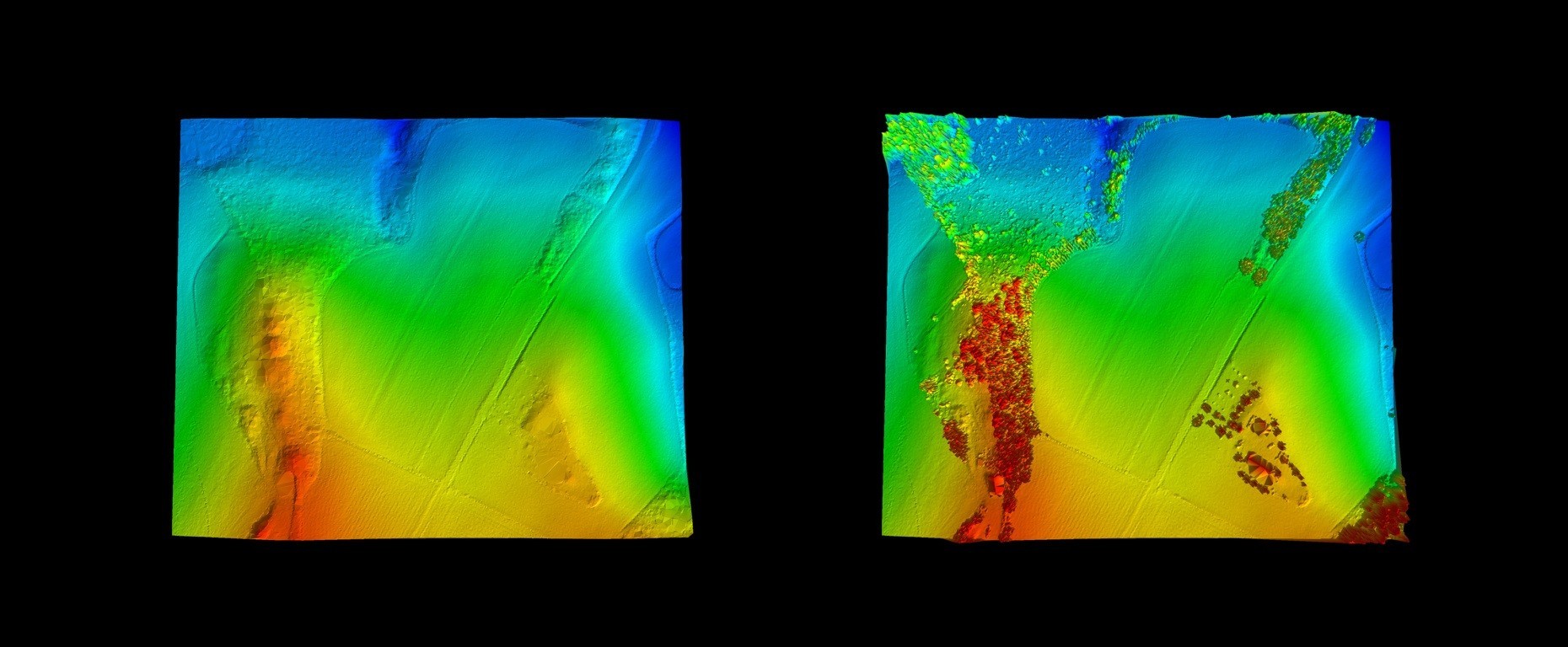
利用LiDAR觀測的數據,可以繪製出不同的數值地形模型,一般而言可分為數值高程模型(Digital Elevation Modeling, DEM)、數值地形模型(Digital Terrain Modeling, DTM)、數值表面模型(Digital Surface Modeling, DSM)以及數值建物模型(Digital Building Model, DBM)四種。
DEM與DTM皆為純粹的地表高程,去除所有地面上的建築物與樹木,也就是地表原本的樣子,被樹林遮蔽的河床、山峰都一一顯現;DSM則記錄地表高度,再加上建築物與樹木等地上物的高度;DBM則是地表再加上建築物的高度。
藉由LiDAR繪製出的數值地形模型精確度可達50〜200公分,比一般衛星遙測的40公尺高上許多。
目前全世界約有300多組LiDAR設備,台灣便有7組,雖然LiDAR的觀測成本較高,但它在國土觀測紀錄、地質分析、水土保持、都市計畫、災害防治、森林資源調查等領域應用廣泛,國外甚至用來調查古代文明遺址。
而在台灣,中央地質調查所也透過使用LiDAR觀測大台北地區、蘭陽平原以及海岸山脈,發現大屯火山群中許多未被發現過的火山口與斷層線,對大台北地區的地震風險評估能更為精確。2009年莫拉克過後,LiDAR也用來記錄高雄小林村周圍地形的劇變。
中央地質調查所預定於2013年利用LiDAR觀測全台灣,目前已幾近完成,台灣將成為世界第三個以LiDAR完成國土掃描的國家(第一是荷蘭,第二是瑞典)。這些高精度的觀測資料,將在台灣未來的國土規劃與變更上扮演重要的參考指標,加深我們對於台灣土地的了解,將更有利於長期的國土保育。 (本文由國科會補助「新媒體科普傳播實作計畫─重大天然災害之防救災科普知識教育推廣」執行團隊撰稿)
責任編輯:鄭國威 | 元智大學資訊社會研究所
本文原發表於行政院國家科學委員會–科技大觀園「科技新知」。歡迎大家到科技大觀園的網站看更多精彩又紮實的科學資訊,也有臉書喔!
延伸學習:
- 呂怡貞,空載光達技術 國土保育利器,科學人。
- 林宗毅,2007,空載LiDAR應用於地形變化量測之研究,國立成功大學地球科學研究所碩士論文。
- 經濟部,DTM數值地形模型





































