為什麼無人機飛得起來?
不管是載人的直升機,還是無人機,飛起來的原因都相同。轉子可帶動螺旋槳旋轉,使螺旋槳上下的氣壓產生差異。當螺旋槳上方的氣壓比下方的氣壓低,就會有一股拉力將螺旋槳往上拉(升力,將物體垂直向上拉升的力量),如此一來便能讓機體上升。
再來,同時使用多個螺旋槳,並分別調整各螺旋槳的轉速,就可以讓無人機自由上升 / 下降、前進 / 後退、左 / 右移動。事實上,仔細觀察飛行中的無人機螺旋槳,會發現相鄰的螺旋槳旋轉方向剛好相反。
想讓無人機前進時,會讓機體前方下傾。左右移動時也一樣,會讓前進方向的機體部份下傾。只要讓其中一側的螺旋槳轉速下降,就可以讓那一側的機體下傾,往那個方向移動。如果要讓四軸無人機旋轉,則需讓其中一條對角線上的螺旋槳轉速降低。
無人機的運動機制
無人機需靠轉子(馬達)轉動螺旋槳才能移動。大疆 Phantom 系列的多軸無人機所搭載的馬達,是所謂的無刷馬達(brushless motor)。

無刷馬達顧名思義,就是沒有電刷的馬達。相對的,學校自然科課程中提到的電刷馬達則是需要讓電刷與整流子持續摩擦旋轉,使用時會逐漸磨損。無刷馬達則是透過特殊電路驅動其旋轉,可以減輕維護的負擔。而且,無刷馬達可以透過名為 Hall IC 的磁場感應器持續監測馬達狀態,故可穩定控制其速度,當發生馬達負荷過重、線路接觸不良、斷線等異常狀況,可以馬上停止馬達運作,並發出警告訊號,以提高無人機的安全性。其他還有速度可控範圍廣、均勻扭矩(flat torque)、高功率等優點。
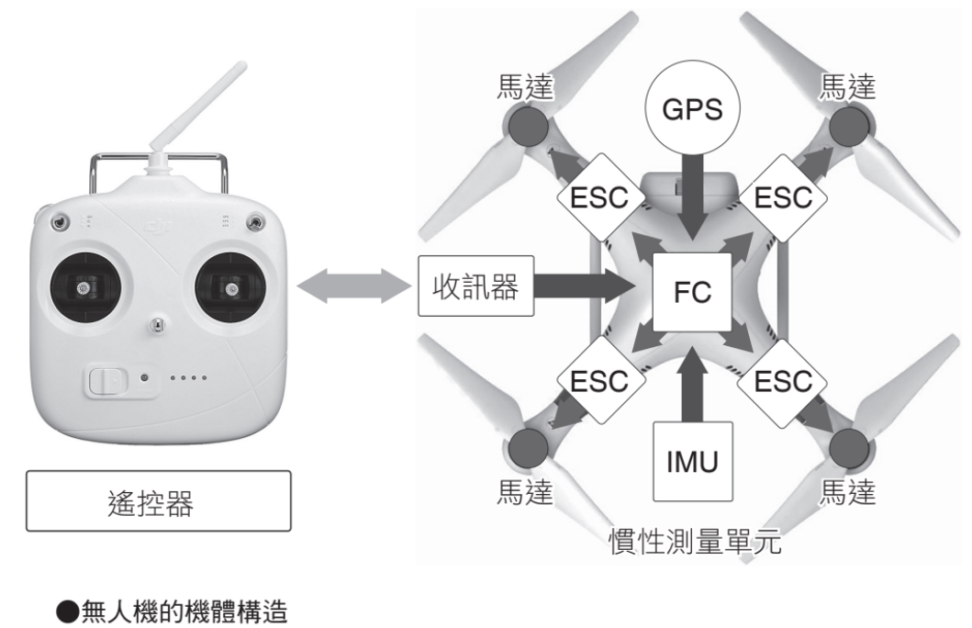
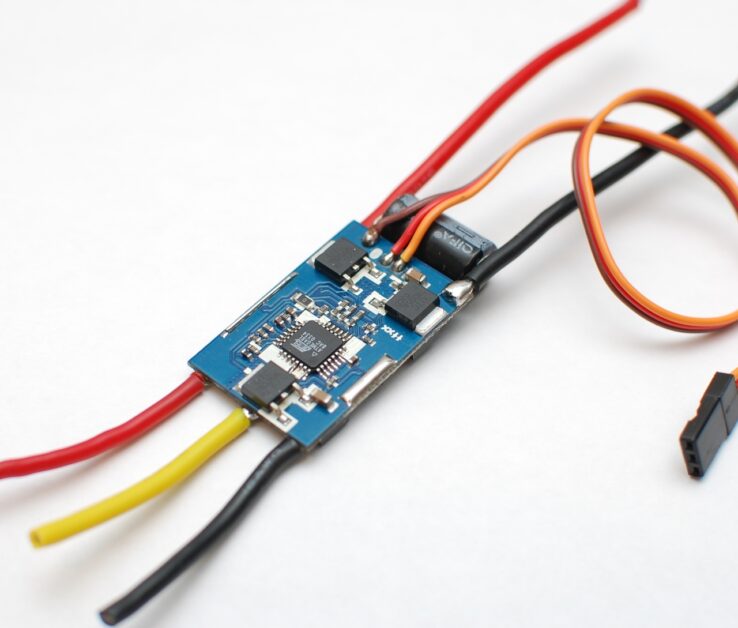
另外,將訊號送至轉子的零件叫做 ESC(Electric Speed Controller)。也可以說,ESC 就是控制轉子旋轉速度的零件。原則上,無人機搭載的 ESC 數量會與轉子數量相同。
ESC 的輸出端有三條電線,電流可控制轉子的旋轉。隨著轉子位置的不同,ESC 會輸出不同方向、不同大小的電流,使轉子能夠持續旋轉。也就是說,無刷馬達中的 ESC,扮演著一般馬達中整流子及電刷的角色。
相對的,ESC 的輸入端也有三條電線,分別是連接到電源正負極的電源線,以及從 FC(Flight Controller)接收訊號的訊號線。其中,FC 會蒐集來自陀螺儀感應器、加速度感應器、氣壓感應器、超音波感應器、磁場方位感應器、GPS 等裝置的資訊,以控制機體的行動。
無人機的感應器
- 陀螺儀感應器與加速度感應器
陀螺儀感應器可以計算機體傾斜的角度,是穩定機體時不可或缺的感應器。相對的,與陀螺儀感應器十分相似的加速度感應器,則用於檢測速度。陀螺儀感應器與加速度感應器的組合,可以同時計算「傾斜狀況」與「速度」兩者的變化量,並控制機體往傾斜方向的反方向拉回,保持機體平衡,懸停於空中。簡單來說,陀螺儀感應器與加速度感應器就是能夠保持無人機姿態平衡的重點感應器。
- 氣壓感應器與超音波感應器
高度越高時,氣壓感應器會測到越低的氣壓,故無人機可參考氣壓數字,以維持在特定高度。不過畢竟這只能用來偵測氣壓,要是遇到陣風或其他原因造成的氣壓變化,就有可能會失去功能。
超音波感應器可以利用超音波的回聲來感應自身高度。在無人機起飛或降落時,如果位於地表附近的無人機沒辦法透過氣壓感應器蒐集到足夠的高度資訊,就會用到超音波感應器。在高空使用氣壓感應器,在地表附近使用超音波感應器,兩種感應器的組合搭配,便可讓無人機在每個高度區間都能維持一定高度。
- 磁場方位感應器與 IMU
磁場方位感應器有時也直接稱做羅盤,可感應地球的磁場(地磁),藉此瞭解無人機目前朝向東西南北哪個方向。不過,地磁的北邊(磁北)與地圖的北邊有一定差異,即磁偏角。而且隨著時間與地點的不同,磁偏角也不大一樣。舉例來說,札幌的磁北比地圖北邊往西偏了 9°,那霸卻只偏了 5°(參考自日本國土地理院網站)。因此,若換一個地方飛無人機,就需進行「羅盤校正」,重新確認磁場感應器所指示的北方,與實際北方間的差異。
- IMU
GPS 是全球衛星導航系統(GNSS:Global Navigation Satellite System)的一種,是美國的衛星系統。就像汽車的導航系統與智慧型手機的位置資訊服務一樣,無人機可接收 GPS 的電波,藉此判斷自身所在位置,並設定好飛行路線的經緯度自動飛行,或是可以懸停在某個固定位置。這就是所謂的「衛星定位系統」,用於戶外飛行的無人機多會裝設相關的電波收訊器。不過,就像汽車在進入隧道後,導航系統會失效一樣,無人機使用 GPS 時也有可能會突然收不到訊號。因此,為了維持無人機的安全飛航,操控者需隨時注意 GPS 電波的接收狀況。
另外,包括 Phantom 在內的某些多軸無人機,不僅會接收 GPS 訊號,也會同時接收俄羅斯衛星系統 GLONASS 的訊號,偵測機體本身的位置。
這些控制機體姿態的感應器通稱為 IMU(慣性測量單元:Inertial Measurement Unit)。
當出現「IMU 錯誤訊息」「機體不穩定」「羅盤方向不對」「穩定器傾斜」等狀況,就需進行「IMU 校正」。請養成攝影前以及在他處飛行前,一定要進行 IMU 校正的習慣。