一個由加州理工學院(Caltech)的科學家所領導的團隊,打造出有史以來第一個能每次測量一個分子質量的機械裝置。
一個由加州理工學院(Caltech)的科學家所領導的團隊,打造出有史以來第一個能每次測量一個分子質量的機械裝置。
研究者表示,這項新技術最終將能幫助醫師診斷疾病,讓生物學家研究病毒與探測細胞的分子機械,甚至賦予科學家更好的奈米粒子與空氣污染測量結果。
該團隊包括來自加州理工 Kavli 奈米科學研究所,以及位於法國 Grenoble 的 CEA-Leti 的研究者。一篇描述這項技術(那包括一個在 CEA-LETI 設施完成的原型奈米裝置)的論文,8/26 出現在 Nature Nanotechnology 期刊線上版。
這個裝置 — 大小只有幾百萬分之一公尺 — 由微小、會振動的橋狀結構所組成。當一個粒子或分子落在橋上,其質量會以一種揭露粒子有多重的方式改變其振盪頻率。
“當每一個粒子到來時,我們能測量其質量,” Michael Roukes 表示,加州理工 Robert M. Abbey 物理學、應用物理學與生物工程教授。”之前沒人能做到這件事。”
這款新設備是基於 Roukes 等人在過去 12 年來所開發的技術。在 2009 年發表的研究中,他們證明,一種橋狀裝置 — 稱為奈米電機系統(NEMS)共振器 — 確實能測量個別粒子(那被噴灑到儀器上)的質量。然而,困難之處在於,所測得的頻率偏移並非只有粒子的真正質量,還包括粒子「著陸」之處。若無法得知粒子的著陸位置,研究者得要分析約 500 個相同粒子的測量結果,才能精確確定其質量。
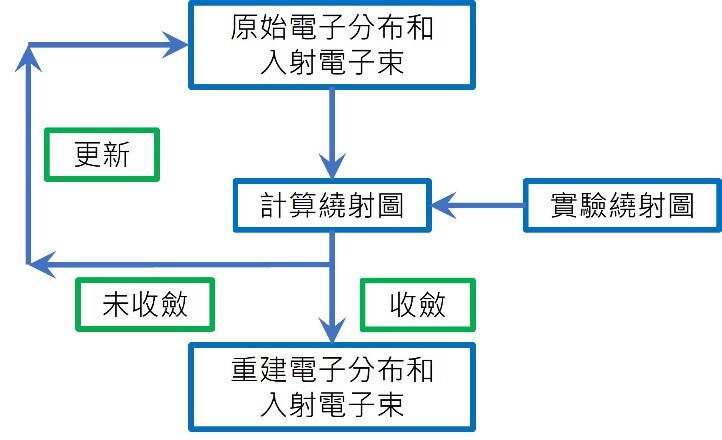
但隨著技術的更新與改良,科學家只要一個粒子就能夠完成測量。”關鍵進展是,在目前的研究中,我們已做到:當分子進入時,我們能一個接著一個為分子稱重,” Roukes 表示。
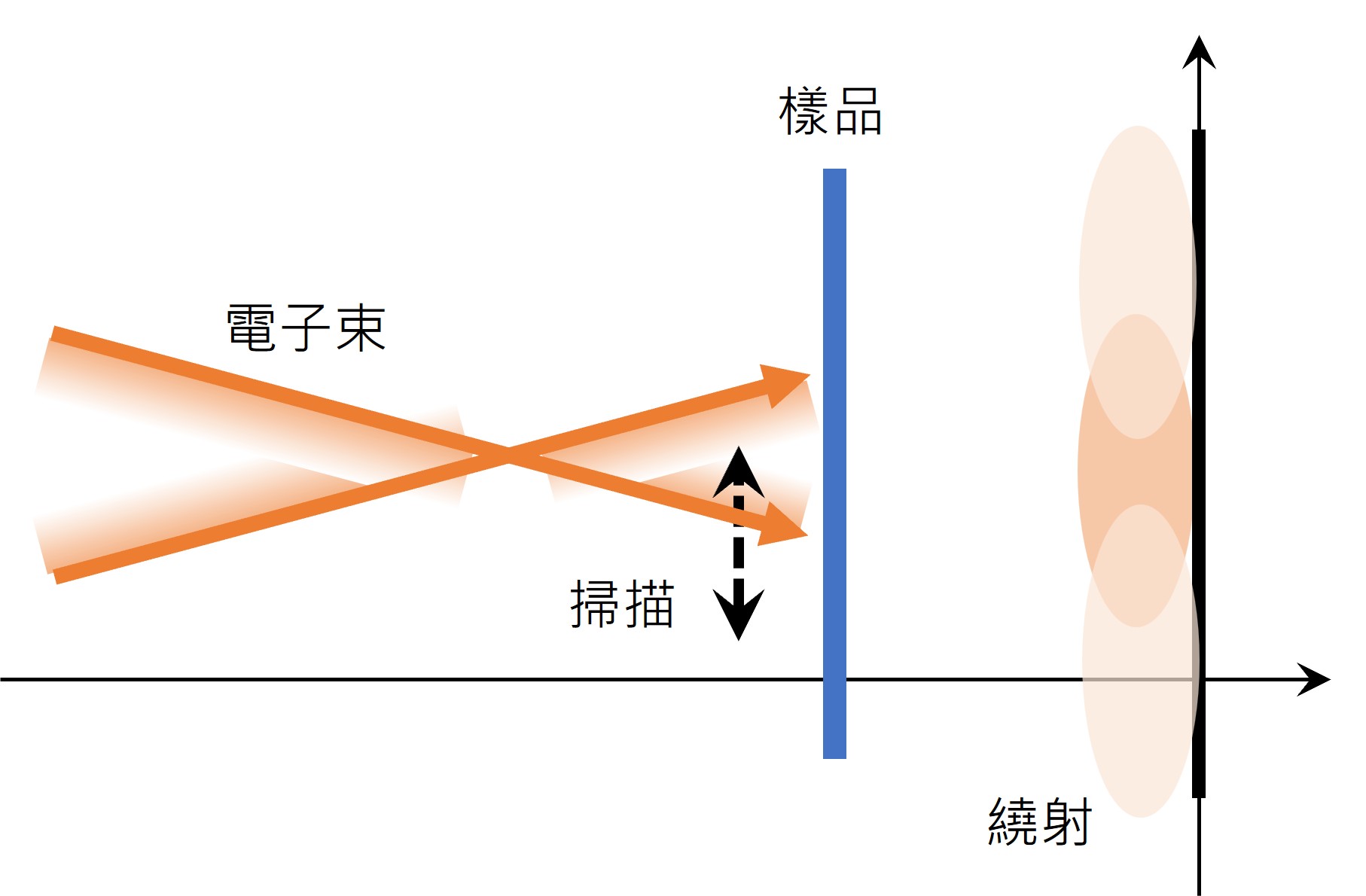
為了辦到這件事,研究者分析一個粒子如何使「橋」的振動頻率偏移。所有的振盪運動是所謂「振動模式」的組合。如果橋只是在第一模態(first mode)中搖動(shake),它會從某一端擺盪到另一端,結構的中心移動範圍最大。第二振動模態(second vibrational mode)處於更高的頻率,其中,橋的一半朝某個方向側移,而另一半則朝相反的方向,形成一振盪的 S 形波,跨距為橋的長度。這裡還有第三模態、第四模態等等。不管橋怎麼振盪,其運動都能以這些振動模式的某種混合來描述。(譯註:振動模式可參考下列網站 http://www.sound-physics.com/Drum-Vibrational-Modes/ )
該團隊發現,當一粒子著陸時,藉由觀察前二種模態的頻率如何改變,他們就能夠決定粒子的質量與位置,Mehmet Selim Hanay 解釋,Roukes 實驗室的博士後研究者,以及論文的第一作者。”透過每一次的測量,我們能決定粒子的質量,以前,這在機械結構中是不可能的事。”
傳統上,是使用一種稱為質譜術的方法來為分子稱重,其中,有十萬分之一的分子被離子化 — 所以它們獲得電荷 — 接著與一電磁場進行交互作用。在分析這種交互作用後,科學家就能夠推斷出分子的質量。
問題在於,這種方法對那些更重的粒子不怎麼管用 — 例如蛋白質或病毒 — 要讓它們獲得電荷並不簡單。結果,它們與電磁場的交互作用太弱,以至於儀器無法進行足夠精確的測量。
在另一方面,這種新裝置則善於對付大型粒子。事實上,研究者表示,那能與現有的商業儀器整合,以擴展它們的能力,讓它們能測量範圍更廣的質量。
研究者稱出免疫球蛋白 M(IgM,一種由血液中的免疫細胞所產生的抗體)的重量,藉此示範他們的新工具如何運作。藉由稱出每個分子的重量 — 那在體內可能有不同的結構與不同的質量 — 研究者能夠計算並確認各種類型的 IgM。這不僅是第一次利用奈米機械裝置為生物分子稱重,還證明亦是向生醫應用跨出直接的一步。未來的儀器可能被用來監測某病患的免疫系統或甚至診斷出免疫性疾病。例如,某一定比例的 IgM 分子是某一種癌症,叫做 Waldenstrom 氏巨球蛋白血症,的特徵。
在更遙遠的未來,新儀器能使生物學家深究細胞的分子機械。蛋白質驅動近乎所有的細胞功能,而它們的特定任務端看,在一種稱為「轉譯後蛋白質修飾(posttranslational modification)」的過程期間,是哪一種分子結構附著其上 — 因而有更多重量增加到蛋白質上。在不同時間測量細胞內每個蛋白質的重量,生物學家現在能獲得某一特定時刻中「每個蛋白質正在做什麼事」的詳細快照。
這種新裝置的另一種優勢是,它利用標準半導體製造技術製成,使得它容易大量生產。這相當關鍵,因為儀器要能為醫師或生物學家所用,將需要成千上萬個像這樣的「橋」平行運作。”在這種裝置 — 那由大型積體電路(large-scale integration)的技術製成 — 的協助下,我們將能順利創造出像這樣的儀器,” Roukes 說。這種新技術,研究者表示,將使得新一代質譜儀的開發成為可能。
“這項結果證明 2006 年開始的「The Alliance for Nanosystems VLSI」如何創造出一種適合的環境,以這些先進、大量製造的裝置完成創新實驗,” Laurent Malier ,CEA-LETI 主管。 The Alliance for Nanosystems VLSI 是加州裡公的 Kavli 奈米科學研究所與 CEA-LETI 之間的合作名稱。”這些裝置,” 他說,”由於成本優勢與過程的可重複性,將使得商業化應用成為可能。”
原始文獻:
M. S. Hanay, S. Kelber, A. K. Naik, D. Chi, S. Hentz,
E. C. Bullard, E. Colinet, L. Duraffourg, M. L. Roukes
Nature Nanotechnology (2012)
doi: 10.1038/nnano.2012.119
資料來源:PHYSORG:Physicists create first-ever mechanical device that measures the mass of a single molecule[August 26, 2012]