爸媽縮水不是老態!當心沉默殺手「骨質疏鬆」,熟記駝、矮、痛3招防骨折


爸媽縮水、駝背並非自然老化,當心是骨質疏鬆惹禍!骨鬆易致骨折失能,甚至威脅生命。快用「駝、矮、痛」三招幫長輩檢測,及早安排骨密度檢查與治療,遠離骨折風險。
端午節習俗掛艾草、飲雄黃以驅除「五毒」,祈求家人平安。很多子女趁端午返鄉,卻發現爸媽似乎「縮水」了?甚至走路開始駝背。這不是自然的「老態」,而是脊椎已發生壓迫的求救訊號。童綜合醫院骨質疏鬆照護中心梁哲翰主任提醒,返鄉探親更需提防威脅長輩健康的「隱形沉默殺手」—骨質疏鬆症。一旦發生骨折,就像崩塌的骨牌,瞬間失去行動力、擊碎晚年生活的尊嚴。趁著端午團圓時,除了送禮,更要為父母進行「骨鬆防災」,觀察是否有「駝、矮、 痛」三大警訊,為爸媽預約 DXA 骨密度檢測。如有骨鬆徵兆,可配合調整生活習慣及運動進行健康管理,且目前有多種治療方式可由諮詢醫師專業評估。
舉例而言,「一位 70 多歲的女士長期受廣泛性下背痛所苦,甚至漸漸影響行動能力,走路越來越走不遠。」梁哲翰主任表示,「在排除神經壓迫並考量患者的年齡後,安排了骨密度檢測,發現骨密度 T 值竟然低達-5.0,遠低於骨質疏鬆症-2.5 的診斷標準,屬於臨床上相當嚴重的『極高骨折風險族群』!」
在醫療團隊的建議下,患者接受採用「長骨頭計畫」,先使用促骨生長藥物,提升骨密度,再接續使用抗骨流失藥物維持骨密度,這也是目前骨鬆治療指引對於極高骨折風險患者的建議。梁哲翰主任說,在這件個案中,患者使用促骨生長的藥物治療到第三、四個月,患者的背部無力與疼痛感便顯著改善。隨著每個月定期回診追蹤,她的體態與行走能力逐漸恢復,甚至順利脫離拐杖,能夠自在地行動。
「骨頭一斷,生活全亂」 初次骨折引發家庭崩塌骨牌效應
世界衛生組織(WHO)已將骨質疏鬆症列為全球僅次於心臟病的第二大健康問題。根據 2025 年《台灣成人骨質疏鬆症防治之共識及指引》,台灣 50 歲以上的國人中,女性每 3 人就有 1 人、男性每 5 人就有 1 人,在一生中會發生一次骨鬆性骨折,且台灣的髖部骨折發生率高居亞洲第一。梁哲翰主任指出,因為骨質是經年累月默默地流失,使原本緻密的骨骼結構被掏空,內部充滿孔洞。多數患者平時沒有明顯症狀,往往是在跌倒、骨折被送進急診時,才驚覺自己早已罹患重度骨鬆。
研究顯示1,骨鬆患者一旦發生初次骨折,如果沒有及早介入治療,再次骨折發生率高達 50%。梁哲翰主任指出,尤其是影響最劇烈的髖部骨折,一年內的死亡率近 20%,且 3 成患者將面臨永久性失能、8 成日常生活嚴重受限(如採買日用品)2,必須仰賴專人長期照護。後續產生的手術醫材、住院、看護費用,更是相當可觀,初次骨折就像倒下的第一塊骨牌,常導致家庭瞬間失衡。
打噴嚏、彎腰搬重物都是隱形地雷!「駝、矮、痛」三招自我檢測
許多民眾誤以為只有劇烈撞擊或發生車禍才會導致骨折,但對重度骨鬆患者來說,一般的「低能量受傷機轉」就具備致命的破壞力。梁哲翰主任說明,很多長輩只是在臥室、浴室滑倒,就發生嚴重的遠端橈骨骨折、近端肱骨骨折或髖部骨折。甚至劇烈打噴嚏、咳嗽、彎腰搬重物、從沙發與床上起身,就可能造成脊椎壓迫性骨折。
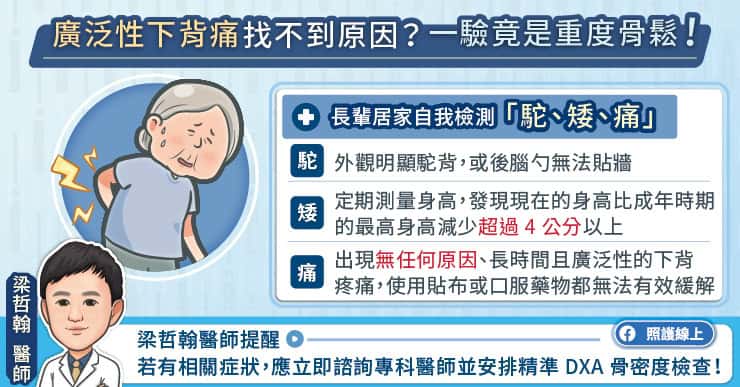
由於脊椎壓迫性骨折有時是慢慢累積塌陷、不一定有急性劇痛,長輩常誤以為只是單純的「腰酸背痛」而錯失黃金治療期。梁哲翰主任呼籲,民眾在日常生活中可以透過「駝、矮、痛」三大常見症狀來進行警訊自我檢測 :
1、駝:外觀有明顯駝背病變,或是後腦勺無法自然緊貼牆壁。
2、矮:定期測量身高,發現現在的身高比成年時期的最高身高減少超過 4 公分以上。
3、痛:出現無任何原因、長時間且廣泛性的下背疼痛,使用貼布或口服藥物都無法有效緩解。
若符合上述狀況,建議進一步接受雙能量 X 光吸收儀(DXA)骨密度檢測。檢測時受檢者只需「躺著測」約 5 分鐘即可完成。若是 T 值介於-1 至-2.5 之間代表骨密度降低,屬於骨質疏少症;若 T 值≤ -2.5,則確診為骨質疏鬆症。
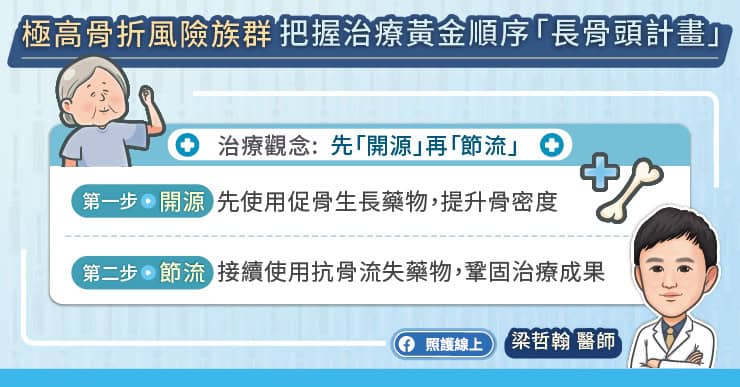
把握骨鬆治療黃金順序:先「開源」長骨頭、後「節流」守成果
一旦經醫師評估為「極高骨折風險族群」—例如最近一年內曾發生骨鬆性骨折、多發性脊椎壓迫性骨折、骨密度 T 值小於等於-3.0、治療期間仍發生新脆弱性骨折,或是透過FRAX(骨折風險評估工具)計算出未來 10 年內骨折風險超高的患者(如:主要骨質疏鬆性骨折> 30%,髖關節骨折> 4.5%),醫師可依個案狀況評估是否採取「長骨頭計畫」或其他介入方式。
骨鬆治療藥物主要分為兩大類:一類是促骨生長藥物(或稱促骨質生成劑),如同「開源」,能促進骨質生成、大幅提升骨密度;另一類則是抗骨流失藥物(或稱抗骨質再吸收劑),如同「節流」,主要用來延緩骨質流失的速度。梁哲翰主任解釋,針對極高風險患者,國際治療準則建議評估優先以促骨生長藥物促進骨質形成、提升骨密度、降低骨折風險,療程結束後,再接續使用抗骨流失藥物來鞏固成果。
梁哲翰主任特別強調,個案的狀況都不同,若是極高風險患者,治療的順序非常重要,把握「先開源、後節流」的黃金順序,才能為脆弱的骨骼爭取到較佳的保護效果。
醫病共享決策守護幸福
梁哲翰主任解釋,在「初級預防(未骨折)」方面,目前健保將骨密度檢測 T 值小於等於-2.5 且合併有糖尿病(使用胰島素者)、類風濕性關節炎或長期使用類固醇超過 3 個月的高風險群已納入給付;在「次級預防(已骨折)」方面,除了脊椎和髖部,也將給付部位放寬至遠端橈骨骨折(手腕)與近端肱骨骨折(上臂),造福了廣大患者。
然而,臨床上仍有部分極高風險群尚未符合健保給付規定。梁哲翰主任建議,這類患者可透過「醫病共享決策」,綜合評估骨密度、共病狀況,決定是否遵照醫囑主動採取藥物治療。除了藥物介入,醫療團隊也會啟動生活型態管理、補充足夠鈣質與維生素 D 以及由個管師進行居家防跌衛教指導。
趁著端午連假返鄉團聚,不妨細心觀察家中長輩是否出現身高變矮、駝背等「駝、矮、痛」現象、或走路變慢需要攙扶等情況。也可利用假期關心長輩骨骼健康,安排一次 DXA 骨密度檢測,及早發現骨質流失風險,多一分預防,讓長輩都能自在行動、安心享受生活。
- 12025 年最新版《台灣成人骨質疏鬆症防治之共識及指引》
- 2International Osteoporosis Foundation Website:https://www.osteoporosis.foundation/patients/about-osteoporosis
- (TWN-785-0626-80075) 衛教資訊由台灣安進協助提供