開始製作小怪獸吧!
文/鮑惟聖
看過許多玩家的機器人作品,我總覺得它們的動作不夠靈活,而且缺少了智慧性,讓人有種隔靴搔癢、無法盡興的感覺,因此就興起了自己動手做一臺的念頭。我所做的這臺機器人,除了外觀酷炫、功能多樣外,還能避開障礙完成指定的任務。
我利用隨處可得的冰棒棍來當作機器人的四肢與身體(支撐控制器的支架),再從「遙控飛機模型店」買八臺8g伺服機當作肌肉、用SC8控制板當作大腦,以及紅外線LED當作眼睛。
這隻我叫它「小怪獸」的四腳仿生機器人,打造完成後,有著兩顆一閃一閃十分討喜的紅色眼睛。它除了可以做伏地挺身外,還能走迷宮。當小怪獸走不出迷宮時,兩顆紅色的眼睛會閃得更快了,並不斷地轉動自己的身體,一副著急想趕快找到出口的樣子。以下我將說明如何利用SC8來製作這臺可愛的小怪獸。
1.設計草圖
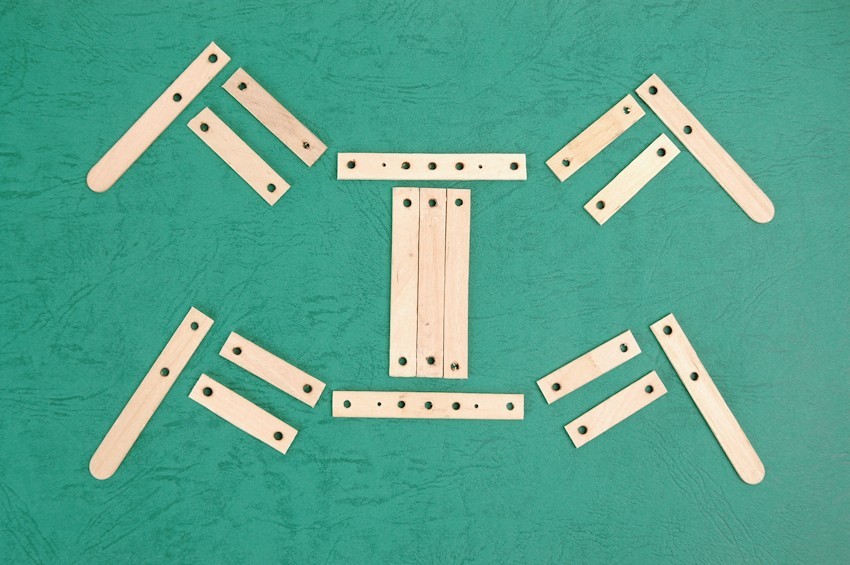
1a. 先設計草圖
1b. 利用這些材料組出「工字形」主支架與「平行結構」四隻腳,基本上這樣骨架就完成了。當然這是我的版本,一旦大家上手之後就可以發揮DIY的精神,設計自己的版本,愈有造型就愈有特色。
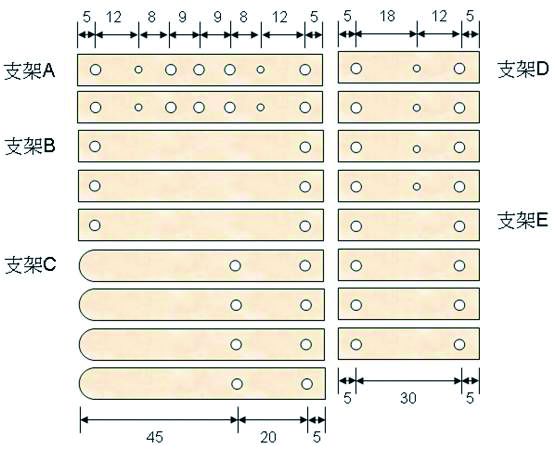
2. 裁切與鑽孔
2a. 冰棒棍在各個文具行都可以買得到,價格很便宜的。但也可以「物盡其用」,買上兩打冰棒然後找朋友幫忙吃完它,「獨樂樂不如與眾樂樂」這機器人也算是「集體創作」。冰棒棍的長度與鑽孔處,草圖上都畫得很清楚了,冰棒棍到手了就可以開始裁切了。
2b. 「工欲善其事,必先利其器」,有臺鑽孔機絕對是如虎添翼的,但是如果手邊沒有鑽孔機,那就需要有雙靈巧的雙手了。注意冰棒棍上的2㎜圓孔是為了固定伺服機的「搖臂」之用。請注意您手邊的伺服機「搖臂」上的孔距,是否可以鎖上,如有差異,請自行調整2㎜圓孔鑽孔位置。
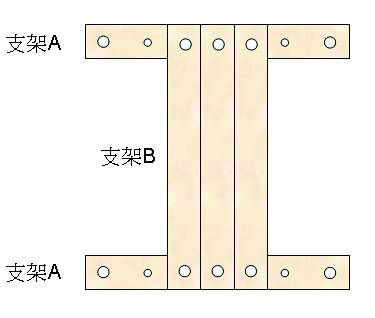
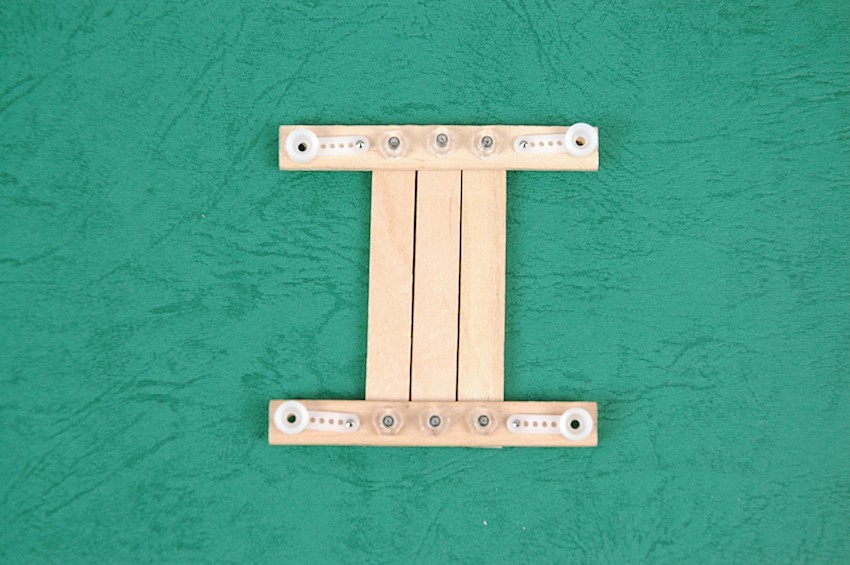
3. 組裝「工字形」支架
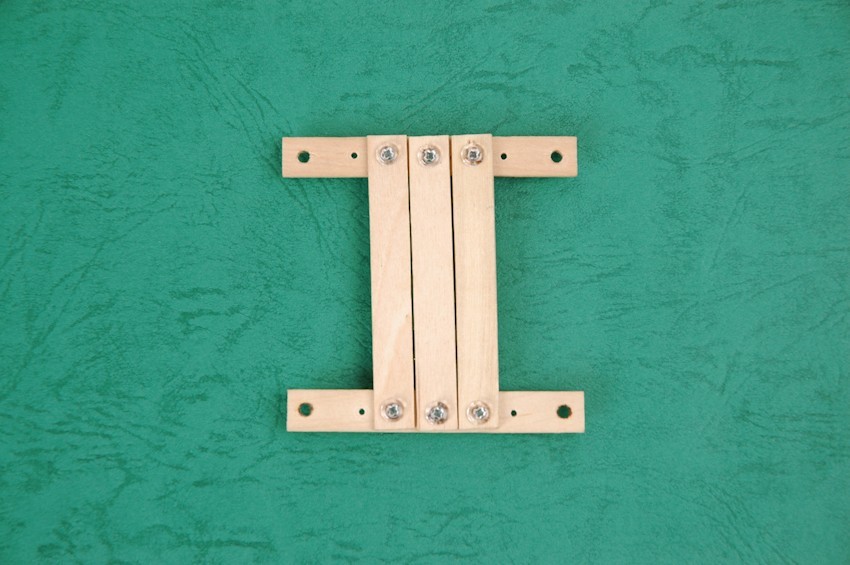
3a. 現在開始組裝,首先是「工字形」的支架,「工字形」的支架下方,會放置電池,「工字形」支架的上方則會放置SC8控制板。為提供較大的承載面積。
3b. 「工字形」支架的中間部份是由三條冰棒棍並排組成,共使用六顆3㎜的塑膠螺絲與螺帽固定。
4. 伺服機定位
4a. 伺服機(或稱之為舵機)是機器人入門的必備零件,在「遙控飛機模型店」都可以買得到。我這裡的「小怪獸」是採用小型8g伺服機。8g指的是伺服機重量約為 8公克。如果仔細找一下還會看到6g、7g、9g的伺服機。除了重量不同外,一般重量越大也代表了扭力比較大。目前「小怪獸」的重量輕,所以扭力影響程度 有限。
4b. 注意伺服機可以轉動的角度範圍。伺服機可以轉動的角度範圍愈大,足部可以伸展的範圍就愈大。一般伺服機都可以達到60度,所以後續的動作都以60度為應用範圍。還有,不要用手大力或快速去轉動伺服機,這樣會很容易造成齒輪崩牙。
4c. 伺服機買到手之後,對第一次玩機器人的朋友來說,必須先了解伺服機的「定位」問題,這是需要花點心思的。首先從組裝的角度來看,伺服機分成主體上的「動力 輸出軸」,以及外加的「搖臂」塑膠件。主體上的「動力輸出軸」可以轉動的範圍是個「絕對」範圍。如何將這「絕對」範圍,因應機構需要,變成「相對」的範 圍,那就要靠「搖臂」的安裝了。有些事情就是愈聽愈糊塗,親自把玩一下就茅塞頓開。
4d. 伺服機定位的目的就是將伺服機動力輸出軸,轉到我們希望的角度位置。一般會是中間位置,這樣我們就可以獲得相同的的正反轉範圍。市面上有伺服機角度設定的 小儀器,使用起來很方便,如果預算可以的話,值得去買一個,很多場合都用得到。但是省錢的方法,就直接安裝InnoBASIC Workshop 2系統,使用內建的「動作編輯器」完成定位的工作。
4e. 到官網下載InnoBASIC Workshop 2安裝軟體,安裝完畢開啟該軟體。
4f. 找一條Mini USB訊號線連接SC8控制板與電腦。當電腦偵測到SC8控制板就會開始USB驅動程式安裝程序。只要按照電腦畫面指示,幾個步驟後就完成USB驅動程式 安裝。如果電腦無法偵測到SC8控制板,請檢查一下是否拿到的不是USB訊號線,而是USB充電纜線。

4g. 如果一切都順利,請在「工具」選單中啟動「動作編輯器」,開始初始設定畫面。由於「小怪獸」不是標準產品,請選擇「預設值」。並在使用模組區選擇Servo Commander 8。

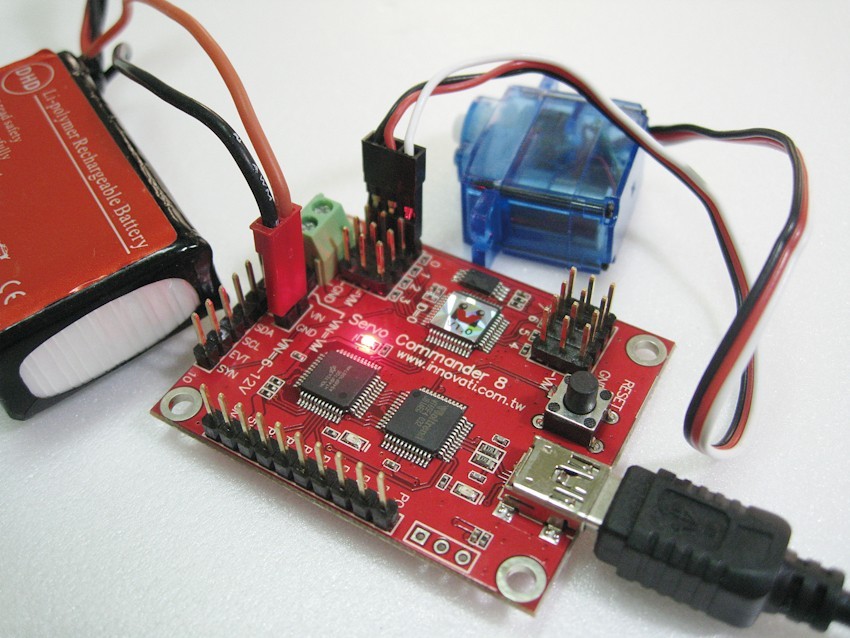
4h. 設定完成後就會有就會出現「動作編輯器」主畫面。在每個通道(CH)的前方都有一的核取方塊 (check box) ,想要使用到的通道就去點選它。我們就先選CH0,同時把想要定位的伺服機插到SC8控制板的CH0接口上。通常伺服機線為黑、紅、白三種顏色,分別代表 電源(-)、電源(+)、訊號線,而且電源(+)在中間。安裝伺服機線時請注意顏色方向。

4i. 現在SC8控制板是使用USB電源,雖然伺服機是插到SC8控制板上,但是SC8控制板只送出控制訊號,各個伺服機的電源則需另外提供,SC8控制板只是 將電源引到伺服機接口處,並未做任何穩壓控制。換句話說,外部電源的電壓是直接通到伺服機,所以一定要注意外部電源電壓與伺服機操作電壓的匹配問題。 現在我們就來看看電池的問題。又要重量輕又要電流夠大,鋰電池通常會是最佳人選了。但是缺點是電壓高了些,規格上為7.4V。如果伺服機的工作電壓較低, 有可能沒有工作多久就會燒毀了。選用5個電池的「鎳鎘」或「鎳氫」充電電池,則可較符合6V規格,缺點則是稍微重了些。電池可使用魔鬼氈黏貼於「工字形」 支架下方,這樣方便取下充電。每次裝上電池時注意不要影響到伺服機的轉動,另外儘量將電池的重心調整到「小怪獸」的正中央讓四隻腳平均受力,否則行走時會 有跛腳現象。
4j. 現在試著調整動作編輯器裡CH0的捲軸或數值,觀察伺服機轉動的狀況。新手可以利用這個機會第一次觀察伺服機轉動與數值設定的關係。將八個伺服機輪流插拔 到CH0,就完成伺服機定位的工作了。如果伺服機上已經有裝上「搖臂」,將它先卸下再來做定位比較好。定位好的伺服機小心不要再去轉動它。好了!電腦可以 先關掉了,我們會有一段時間用不到電腦。
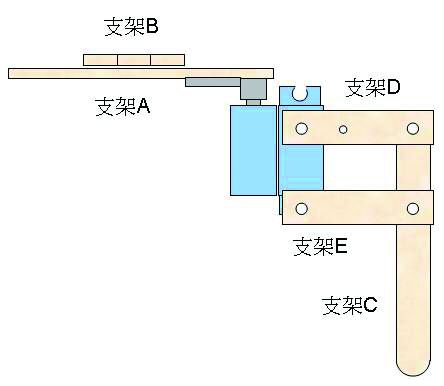
5.安裝伺服機
5a. 使用2㎜攻牙螺絲將四支「搖臂」固定到「工字形」支架下方。
5b. 使用伺服機所提供的螺絲,將四個伺服機與「搖臂」結合。注意在結合的過程中不要轉動到伺服機的軸,最後再使用所附的螺絲將其鎖緊。此時伺服機、搖臂、「工字形」支架的相對位置已固定,如果不小心轉動到伺服機,只要將它輕輕轉回即可。
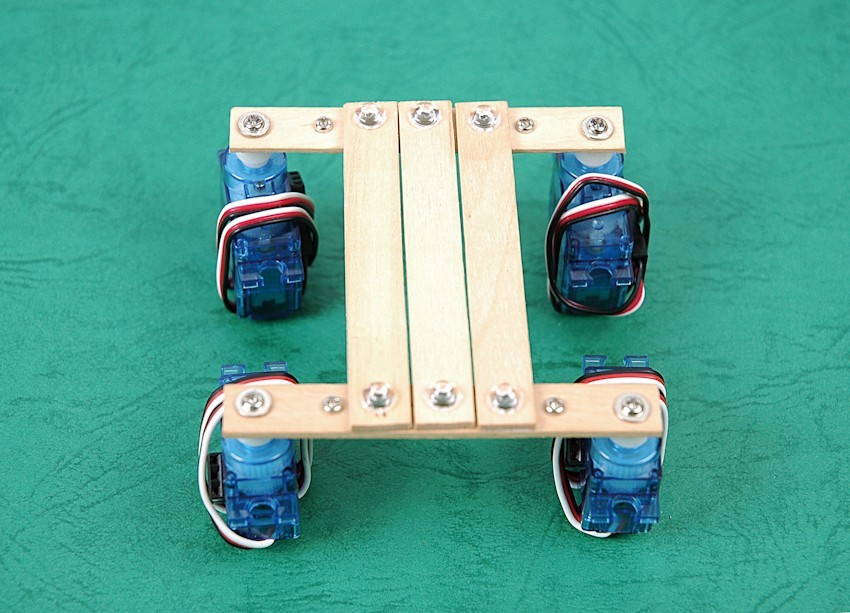
5c. 接著使用3M雙面膠,將伺服機以90度直角互相黏合。現在四隻腳已經可以前後、上下轉動了,八個自由度就完成了。
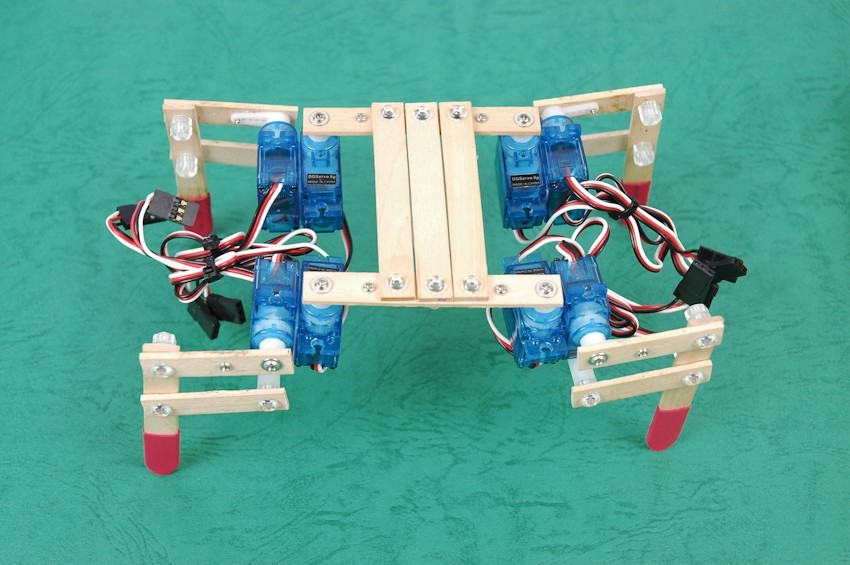
6.安裝平行結構腳
6a. 平行結構最主要的目的在保持足部與地面垂直,獲得較好的運動形式,同時分散伺服機輸出軸的力距到平行結構上,減少受損機率。
6b. 伺服機動力輸出軸當然是平行結構的支點,平行結構的另一個支點,則是使用長度1公分的塑膠柱鎖在伺服機的固定孔做為第二個支點,一般8g伺服機結構類似,應該都可以適用。

6c. 連桿部份目前的設計是使用塑膠螺絲,另一端則是連續鎖上二個螺帽,以固定螺帽位置以免螺帽鬆脫。如何將冰棒棍結合在一起,不能太緊導致轉動不易,又不能太鬆變得結構鬆散,就要靠調整這二個螺帽的位置了。
6d. 伺服機的「搖臂」則以2㎜攻牙螺絲鎖到平行結構上。

6e. 最後使用伺服機所提供的螺絲將平行結構鎖到伺服機上。注意在結合的過程中不要轉動到伺服機的軸。鎖緊「平行結構」腳之後,足部支架的相對位置已固定,如果不小心轉動到伺服機,只要將它輕輕轉回即可。其他三隻腳以相同的方式安裝之。
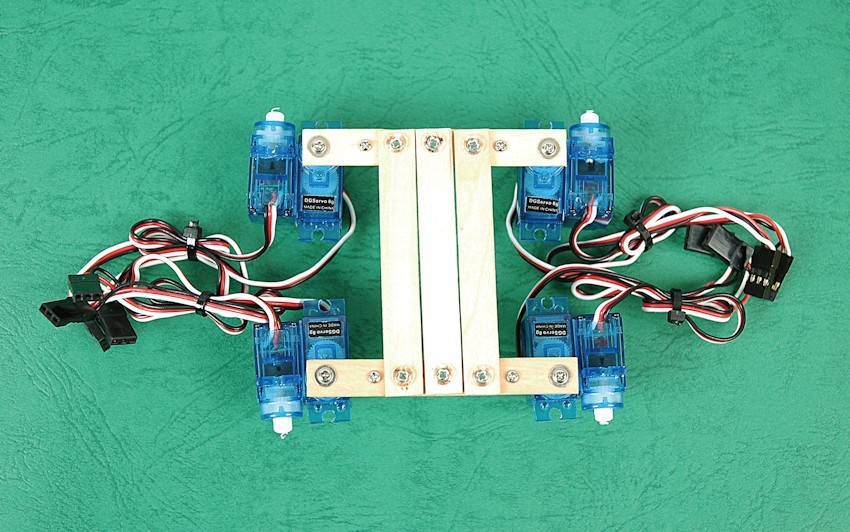
7.安裝SC8控制板
7a. 使用海綿雙面膠把SC8控制板固定在「工字形」支架上方。請注意,SC8控制板下緣的一排針腳就是輸出入腳的位置。由於最後會把感測器放到這裡,所以SC8控制板下緣應朝向前方,我們將它定義為「頭部」。SC8控制板可以控制最多八個伺服機,分別標示為CH0∼CH7。

7b.八個伺服機的依編號插至SC8控制板,插裝時並注意接頭顏色方向。安裝完成後線材凌亂可以使用束線帶整理。
NOTE:
SC8 (Servo Commander 8)的使用手冊:http://www.innovati.com.tw/website/down/html/?151.html
*鮑惟聖
擁有中原大學電機工程學士學位,利基應用科技(www.innovati.com.tw)的創辦人。多年來一直從事微處理器應用與系統工具的開發,並致力於推廣智慧型機器人科普教育。
更多:
仿生機器人──小怪獸(運用篇)
仿生機器人──小怪獸(升級篇)
本文原發表於《Make》國際中文版vol.03
































-200x200.jpg)