
三民書局
・2020/03/10
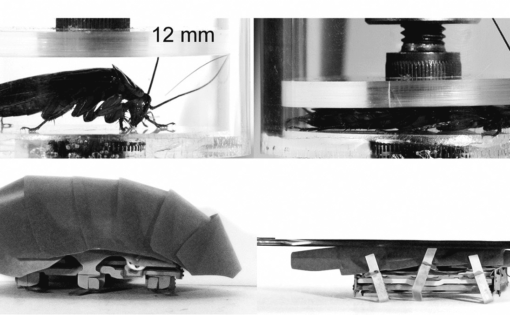
2009年科學家結合堅硬的零件和柔軟的零件,創造出「動態自主式爬行六足機器人」它每秒可移動自己的一個體長距離,但卻有一個根本問題是它無法被輾壓。研究人員是如何將它重新設計為可輾壓機器人?而在可輾壓之後,卻無法順利前進,又該如何解決?
馥林文化
・2012/05/10
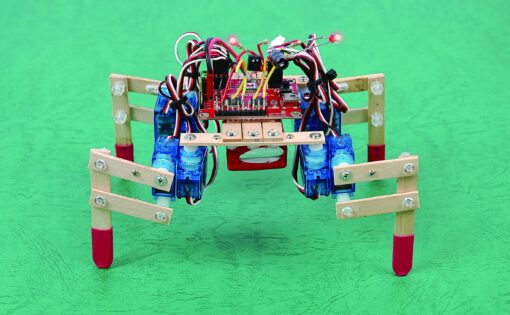
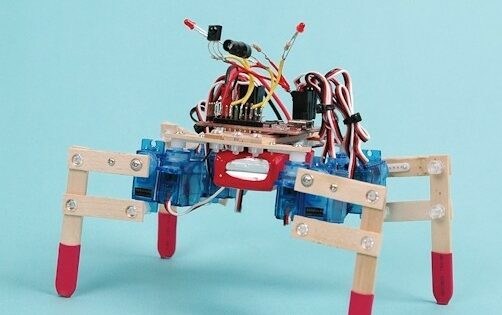
現在「小怪獸」已經可以靈活的動作了,來一段有趣的舞蹈也是不難事。前面有提到我們想替「小怪獸」裝二個LED與紅外線感測器(圖A),讓它看起來更酷更聰明,現在就繼續努力吧!
馥林文化
・2012/05/09
基本上到目前「小怪獸」的硬體算是完成了。原來規劃還有LED與紅外線感測器部分,我們等到「小怪獸」可以行走了之後再來加裝。現在請開啟 InnoBASIC Workshop 2環境,到「動作編輯器」的主畫面(圖A)。機器人最基本的行走原理就類似早期的卡通影片,將許多的靜態畫面連續播放,就形成了動態的畫面。這時候如何正 確而精準地將一個動作拆成幾個分解動作,就是機器人運動能力優劣的關鍵了。
馥林文化
・2012/05/09
這隻我叫它「小怪獸」的四腳仿生機器人,打造完成後,有著兩顆一閃一閃十分討喜的紅色眼睛。它除了可以做伏地挺身外,還能走迷宮。當小怪獸走不出迷 宮時,兩顆紅色的眼睛會閃得更快了,並不斷地轉動自己的身體,一副著急想趕快找到出口的樣子。以下我將說明如何利用SC8來製作這臺可愛的小怪獸。