


白堊紀(Cretaceous),可說是被子植物的時代。被子植物從白堊紀早期開始適應輻射,其多樣性在此時期爆炸性的成長,到了白堊紀晚期時被子植物已成了陸地植群的主宰,許多現生的科群也已然誕生。而相較於「花花世界」的絢爛,在此之前的中生代前期則是裸子植物和蕨類植物的世界,陸地森林充滿了蘇鐵、本內蘇鐵、銀杏和松柏等植物。
植物這樣大規模的「改朝換代」如何影響與其共生的昆蟲們呢?透過琥珀化石,我們可能得到了一點線索。

來自白堊紀的琥珀化石:馬氏達爾文擬天牛
在西班牙北部的巴斯克─坎塔布連盆地,可以找到出產自白堊紀時期的琥珀化石,其年代估計約在 1.05 億年前,比近年在古昆蟲學界相當夯的緬甸琥珀估計為 9900 萬年前來得更早。2017 年一篇刊載於《支序分類學》(Cladistics)的論文中,揭露了一塊特別的巴斯克─坎塔布連盆地甲蟲琥珀化石:這隻甲蟲的周圍佈滿了花粉(甚至有一些還附在蟲體身上)。學者推測,這位苦主當時正在大口嚼著花粉餐,卻在吃得滿嘴都是時,倒楣地被樹脂給包埋,成為了時空凝結的可憐蟲。
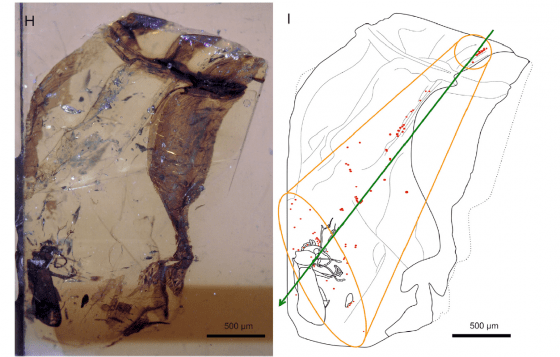
透過比較形態學,研究人員認為這隻甲蟲隸屬於擬天牛科(Oedemeridae),是本科最古老的化石紀錄。本種被命名為馬氏達爾文擬天牛(Darwinylus marcosi Peris),其屬名字首以達爾文命名,種小名則紀念作者的兒子馬可仕。擬天牛科為小、中小型甲蟲,軀體、足部修長而身體柔軟,觸角細長,前胸背板前寬後窄;成蟲白日會出現在花或葉面上,喜訪花取食花粉;部分類群像是芫菁會分泌毒素芫菁素(Cantharidin) 接觸到肌膚會造成起水泡、潰爛。

白堊紀有哪些昆蟲幫裸子植物授粉?
研究人員更進一步對這個化石物種的形態和古生物學角度的剖析,探討其演化意義。2017 年稍晚,同篇文章作者領頭的研究團隊在《當代生物學》(Current Biology)再次發表了針對馬氏達爾文擬天牛的古生物學研究,探討訪花甲蟲與裸子植物間的授粉關係及演化歷史。
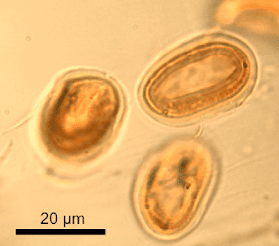
這次,研究團隊先確認了「這些花粉是否真的是屬於裸子植物的?」。透過植物孢粉化石的研究和微細結構的比對,這些花粉被認為屬於單槽粉屬(Monosulcites)(下圖),雖然單槽粉屬實際上除了包含各種不同的中生代裸子植物的花粉,在一些少數的例子裏,有一些被子植物的花粉也被歸類到單槽粉屬,然而由於這些被子植物單槽粉屬的化石在年代上均是新生代,因此研究團隊確認該琥珀化石中的這些花粉應是屬於裸子植物的花粉。
在確認包裹馬氏達爾文擬天牛的的確是裸子植物的花粉後,文章作者接著探討達爾文擬天牛屬與裸子植物間的交互關係。
在此之前,與中生代裸子植物授粉有關的昆蟲依口器和取食方式分為三類:
- 透過吸管狀的長喙吸食裸子植物的授粉滴(Pollination Drops),這類昆蟲包括了:雙翅目張氏擬樹虻科 (Zhangsolvidae)的華麗喇叭虻(Buccinatormyia magnifica)、脈翅目麗蛉科(Kalligrammatidae)的猛暴麗蛉(Kallihemerobius feroculus) 和 艷麗中生脈翅蛉(Meioneurites spectabilis)。
- 利用唇瓣舔吸授粉滴的雙翅目昆蟲,如:帕洛蠅屬(Paroikus)。
- 使用口錐對植物體進行銼吸的纓翅目食孢薊馬科(Merothripidae)裸子粉授薊馬屬 (Gymnopollisthrips),包含大裸子粉授薊馬(G. maior)和小裸子粉授薊馬(G. minor)。
透過形態觀察,研究人員發現馬氏達爾文擬天牛的口器屬於咀嚼式口器;這點與原先的三種分類不同,卻與現生的擬天牛一樣:利用強壯的大顎啃食花粉。因而亦可能扮演著協助傳播花粉的角色,進而被認為是第四種中生代裸子植物的授粉形式。

植物大規模改朝換代,活下去或是我跟你走?
然而現生的擬天牛科成員常見於被子植物的花叢間,與裸子植物沒有明顯的伴生關係。那麼,又是什麼讓我遇見這樣的你?
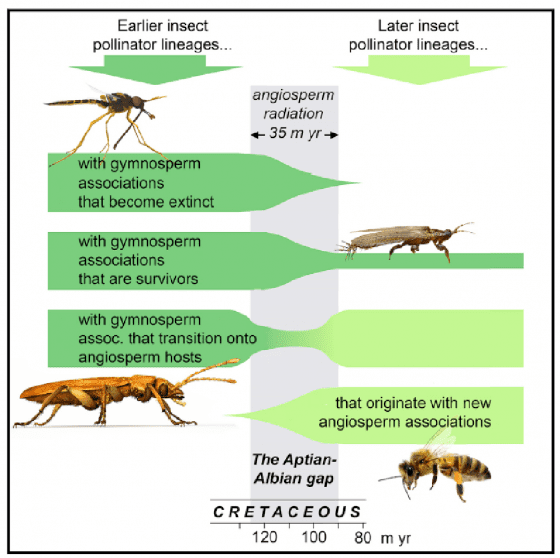
白堊紀中期,有段全球性震盪期被稱為阿普第─阿爾布間斷期(Aptian-Albian gap),約在 1.25 億到 9 千萬年前。從化石紀錄來看,這段期間中原本優勢的裸子植物多樣性驟降,而被子植物則漸漸興盛,可謂改朝換代。此時站在命運交叉點的裸子植物伴生昆蟲們當然也面臨了生存挑戰,某些類群出現了新的策略,當然也有一些維持原來的生存方式,迎來了不同的結局和未來 (如下圖)。
某些昆蟲的類群因此在演化的歷史上滅絕,如:張氏擬樹虻;另一些昆蟲則繼續維持與裸子植物的伴生關係、存續至今,如現在還存在的食孢薊馬。當然,還有另外一些昆蟲的寄生對象則由裸子植物轉移到被子植物。如今在花間依然常見的擬天牛,由這次的琥珀化石暗示我們的,很可能就是成功由裸子植物拓殖到被子植物,度過嚴峻考驗、從此生生不息綿延昌盛的好例子。
論文連結:
- Peris, D., 2017. Early Cretaceous origin of pollen‐feeding beetles (Insecta: Coleoptera: Oedemeridae), Cretaceous Research 33: 268-278.
- Peris, D., Pérez-de la Fuente, R., Peñalver, E., Delclòs, X., Barrón, E., Labandeira, C.C., 2017. False Blister Beetles and the Expansion of Gymnosperm-Insect Pollination Modes before Angiosperm Dominance. Current Biology 27: 897-904.






































{kind=link}