並沒有,但朗之萬公式是今天的主角。 這兩年全世界都被 COVID-19(特殊嚴重傳染性肺炎、新冠肺炎、武漢肺炎)疫情搞得雞飛狗跳。除了疫苗之外,「口罩、洗手、社交距離」堪稱「物理防疫三神器」。我們剛度過了第二個疫情下的中秋假期,看到各大交通轉運樞紐人山人海的群聚,不禁讓人擔心,擠成這副德性,樣怎麼保持社交距離啊?
最近頒發的 2021 年「第 31 次的第一屆」搞笑諾貝爾物理獎,也跟「社交距離」有關:在行人十分擁擠的通道上,大家如何互相閃躲以避免相撞,並且順利通行?
疫情前,大家在生活中碰到這種情境的經驗應該很頻繁,反正就順著人流走,有人擠過來過互相閃一下(然後心裡暗譙一下…有時候啦),經過一個不怎麼舒服的過程後,通常能順利通過。
但是這種在生活中看起來簡單的過程,有沒有辦法以物理學來理解呢?
物理學的主流是「化約主義」:希望用最簡單的理論來解釋各種現象。例如古典物理中用一個牛頓第二定律「F = ma」來解釋物體如何運動,用馬克斯威爾的四條方程式解釋一切電、磁與光的現象。物理學家的終極目標就是找出可以用一條方程式理解整個宇宙的過去、現在與未來的「萬物理論(The Theory of everything)」,所謂的萬物,當然是包含「人類行為」在內囉!
但是其他領域的學者可不吃這一套!比如說「人類的社會行為」,牽涉到神經科學、心理學、社會學等領域,每個領域都十分複雜,怎麼可能用物理學的化約主義來研究呢?
物理學家才不管這些,先做了再說! 荷蘭 Eindhoven 科技大學、加州州立大學長灘分校以及義大利 Vergata 大學組成的研究團隊,探討了「擁擠的車站內通道的行人動力學」。其中加州州立大學的成員,是來自台灣的女科學家 Chung-min Lee 教授。
遊戲機變成高效的姿態感測器! 研究者將四部微軟電視遊樂器 X-BOX 用來捕捉玩家身體姿態動作的影像捕捉週邊設備「Kinect」裝設在 Eindhoven 火車站的通道上方,用以記錄通過這個通道的人群動態。這條通道一頭是市中心,另一頭則是巴士總站。
圖一:(a) Eindhoven 車站的通道平面圖,以及 Kinect 感測器(K)配置。(b) 實景照片,上方白色橫樑可見四支 Kinect 感測器。 利用這四部 Kinect 拍攝到的行人影像,搭配影像辨識以及追跡演算法,可以同時標定每個進入畫面的行人,並且一路追蹤其軌跡直到離開畫面為止。整套系統從 2014 年 10 月到 2015 年 3 月,不間斷的記錄了六個月的時間,一共得到大約 500 萬人次的行人軌跡。
數據太複雜?別擔心,物理學家最擅長「化約」了 這些紀錄是貨真價實的複雜人類行為:有的是勇往直前一直線,有些左右搖擺,有些因為某些原因走到一半掉頭,也有真的就跟別人撞成一團的…物理學家如何發揮「化約主義」本色,將這些複雜的行為化簡成可以分析的數學形式呢?
研究團隊採取的方法是用將這長達六個月,累計數百萬行人來來去去的影片轉換成一個由一組「節點」(node)以及節點與節點之間的連線(edge)所組成的「圖」(graph)。
圖中每個節點都代表一個行人以及通過通道時的相關資訊,如行徑方向與軌跡長度。如果兩個行人(節點)在同一時間出現在同一畫面中,則這兩個節點就用線連起來,這條線的資訊包含它連結了哪兩個節點、兩節點間最大與最小的距離、同時在畫面上的時間等等。
圖二:將影像轉變為圖形,每個節點(以帶數字的圓圈表示)都是一個行人,如果兩個行人同時在鏡頭裡就會有一條連線。(a) 從影像轉來的原始圖形示意圖,這個圖可以分成四個子圖。(b) 把雖然有同時入鏡,但是距離太遠,不太可能會互相影響的兩個節點間的連線去掉(以虛線表示),讓圖形更進一步簡化。(c) 「只有一條線連結兩個節點」的子圖。(d) 行進方向相同,不需考慮迴避碰撞,所以把連結拿掉。(e) 最後剩下的「雙節點子圖」。圖/參考文獻 1 假設一個情境如下(請拿出您的耐性,搭配圖二 (a) 看):天剛亮時第 ① 個行人被攝影機捕捉到,接著第 ② 個行人跟在①後面進來,① 離開畫面後,③ 跟 ④ 分別從兩側走進來,在 ② 跟 ③ 離開畫面後,一班火車進站 ⑤⑥⑦ 先後進入畫面,然後人都離開了,中間的空檔只有 ⑧ 獨自通過,接著又有一班火車進來,⑨~⑫ 一起入鏡,最後一個離開鏡頭的 ⑫ 出鏡前瞬間 ⑬ 進來了,⑫ 離開後,⑭⑮ 進入,接著 ⑬⑭⑮ 先後出鏡,然後 ⑯ 獨自通過。
看起來有點煩,對不對?
不過轉換成圖二 (a) 的表示法,是不是就一目了然了呢?這就是「化約」的威力。即使如此,六個月累積下來的圖,上面會有 500 多萬個節點,節點間的連線數目可能上千萬,還是非常複雜。不過我們可以把這一大張圖拆成幾個「子圖」(subgraph):每個子圖包含的節點可以靠彼此的連結連成一片,不同子圖之間則完全沒有連線。
以圖二 (a) 為例,可以分成四個子圖:一、節點 ①~⑦;二、節點 ⑧;三、節點 ⑨~⑮;四、節點 ⑯。只有子圖內部的節點可能彼此有交互作用。
但是即使把整張幾百萬個節點的超大圖拆成許多節點數較少的子圖,可能還是很難分析,像圖二 (a) 的「子圖一」包含了七個節點,要分析這七個行人怎麼互動,怎麼彼此調整行進的路線,還是太複雜了。考慮實際狀況,可以再進一步簡化:
兩個人即使同時出現在畫面中,如果距離很遠或接觸時間很短,幾乎不可能影響彼此,就把這兩人之間的連線拿掉 ,比如前面的例子「⑫ 出鏡前瞬間 ⑬ 進來了」的情形,就可以拿掉連線。如圖二 (b) 所示,這種太弱的連線(以虛線表示)拿掉後,會把圖形分成更多、更小的子圖。以圖二 (b) 來說,變成 8 個子圖,其中最大的也只有四個節點。
接下來,這篇論文只探討最簡單的兩種子圖:只有一個節點的,如圖二 (b) 中的 ⑧、⑬、⑯,以及兩個節點的 ①②、③④、以及 ⑭⑮,如圖二 (c)~(e)。其中 ①② 為同方向,不需要迴避相撞,所以也把這條連結拿掉,就變成各自落單的單一節點子圖了。
實際上「單節點子圖」一共有 47122 個,「雙節點子圖」一共有 9089 個。
A 編按:圖2 (a) 上「節點上的數字」代表「進入鏡頭的順序」,「節點間的連線」代表「兩人是否同時出現在同一畫面」,透過這種方式組成的圖 2 (a),可以明確區分出那些序列是有可能相撞的。
接著再細部分析每個連線,如果距離太遠或接觸時間太短,就不可能產生碰撞或閃避行為,將符合此條件的連線設為「虛線」,形成圖 2 (b)。
最後考慮圖 2 (b) 內,每個有實線連結的節點行徑方向,如果是兩節點的行徑方向相同,就不會發生碰撞或閃避行為,可以排除不用分析,得到圖 2 (e) 的圖。
雖然我們物理學家經常吹噓物理很厲害,不過事實上我們能夠解出精確答案的力學問題,只有「一個粒子的運動」跟「兩個彼此交互作用的粒子的運動」而已,碰到「三個彼此交互作用的粒子的運動」就沒輒了,只能有近似解或是用數值模擬,所以才會有像「三體」這種科幻作品的出現啊!
三個、四個、五個…粒子的問題物理學家不會算,但是當粒子數目成千上萬或更多時,「熱力學」就登場了,物理學可以回答「很多粒子的平均行為」,並且拿來解釋熱、溫度與壓力等現象。
回歸正題,人類行為顯然比質點複雜太多,所以先從「一個人」跟「互相作用的兩個人」的行為模式著手,以此為基礎來探討「很多人的集體行為」,是相當合理的策略。
行人的軌跡其實不是直線,曲折的像是水裡的灰塵
先從最簡單的「一個人的動力學」開始,在沒有其他人的影響下,行人的軌跡大多會呈現頻率約 1 Hz(每秒一次)的小幅度「抖動」,這個很容易理解,因為這大約是人類的步伐頻率;除此之外,少數軌跡也會有比較大的晃動,甚至轉頭往回走的情形。研究團隊發現,這個行為模式跟「布朗運動」——把花粉、灰塵這些細小的物體放在水中,會被亂跑的水分子撞來撞去也跟著亂跑——類似。
既然如此,就用解釋布朗運動的「朗之萬」方程式(Langevin equation,對,就是那位跟偉大的瑪麗‧居禮傳出緋聞的朗之萬)試試看吧!
所謂的朗之萬方程式其實也很簡單,就是在物體「本來的運動傾向」之外,加上「流體的阻力」,以及「隨機的力量」。
什麼是這些行人「本來的運動傾向」呢? 因為這是一條連通兩端的通道,不管是為了節省力氣或趕時間,絕大部分的人都是沿著平行通道的方向從一端以最短距離走向另一端,而不會斜著走;其次是多數人用正常速度走,但也有相當比例的人因為趕時間是快走或小跑步,其平均速率分別為每秒 1.29 與 2.70 公尺(換算成時速是 4.64 與 9.72 公里);最後就是兩個方向都有人走。以上這些「運動的傾向」,可以寫成牛頓第二運動定律的方程式。
接著是「流體的阻力」,當行人開始偏離原來的行進路線時,會受到一個與垂直原方向的速率成正比的阻力,要將這個人「推」回原來的路線。
各位在像台北車站這類擁擠的走道上時可能有注意到:雙向行人會構成「層流」的結構,走同一個方向的人自動排起來列隊前進,這是阻力較小,也會比較省力的走路方式 ,偏離你所在的隊伍,就可能跟隔壁的隊伍發生摩擦甚至碰撞而難以通行,所以除非有強大的改變路徑的原因,不然我們自然就會回到原來的路徑上。
最後就是「隨機的力量」,我們周圍的其他行人隨時都有狀況,停下來拿東西的、路線突然歪掉的、腳扭了一下、忘記東西回頭的… … 我們必須眼觀四面,耳聽八方,隨時對這些狀況做出反應,以避免可能的衝撞,同時也造成路徑的改變。
寫下了運動方程式後,就可以在電腦裡面進行模擬,然後來跟攝影機拍到的行人真正的行為比較。結果出來了,人類的行為,可能沒有比空中的灰塵,水中的花粉更高明……
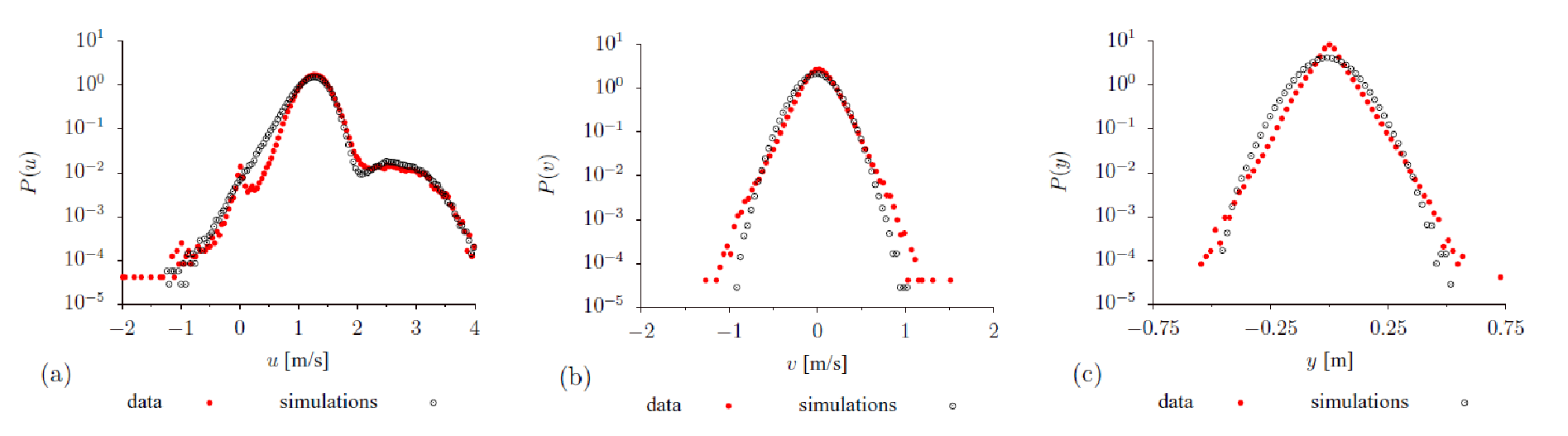
圖三:行人在 (a) 平行通道人流方向速率、(b) 垂直於人流方向的速率、與 (c) 偏離路徑的程度的統計分布。實際觀察結果(紅點)與電腦模擬數據(黑圈)的比較。 圖/參考文獻 1 圖三為「一開始朝著巴士站方向走」的那些「單一節點」(沒有受到旁人影響)的運動狀況統計,紅點是攝影機拍到的真實行為,黑色圈圈是朗之萬方程式模擬的結果。
圖三 (a) 為平行通道方向的速率分布(本來的運動傾向),可以發現真實行為與模擬結果相當吻合! 最多人是用秒速 1.29 公尺前進,有少數人是用跑的,所以在超過秒速兩公尺處也有一個小高峰,還有極少數的人會往回走(速率是負的),唯一沒抓到的特徵是在速率為零(停止)的附近。因為行人偶爾會因為種種原因而在路上停下來一段時間,但是布朗運動中的微小粒子只有在轉向的瞬間才會測得速率為零。
圖三 (b) 為垂直於行進方向的速率(流體的阻力),圖三 (c) 為偏離原來行進路線的距離(隨機的力量),兩者也都相當吻合。
結論是:如果行人的密度相當稀疏,不需要互相閃避時,行人的行為基本上跟水中的花粉進行的布朗運動很類似,可以用朗之萬方程式模擬出來。
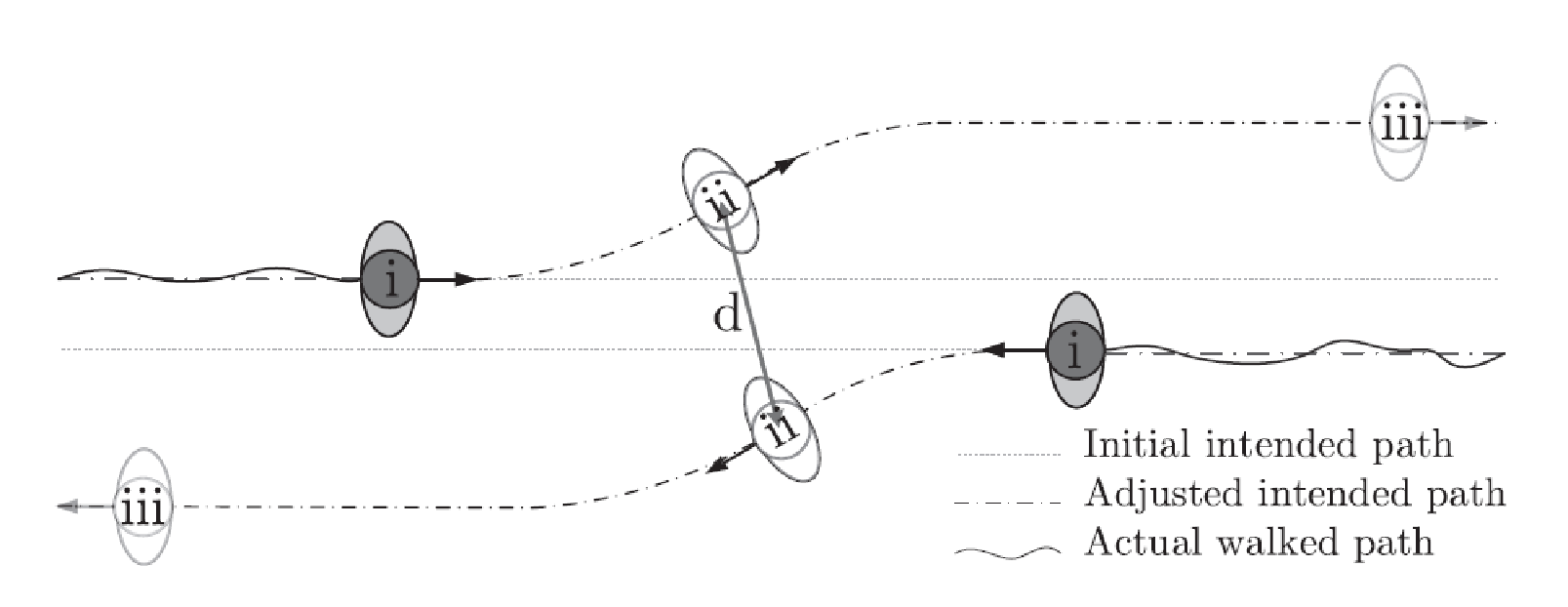
接下來,就是考慮「兩個人互相靠近,需要互相迴避,但附近沒有其他人攪局」 ,也就是如圖四的狀況。
圖四:兩個互相接近的行人彼此閃避的示意圖。灰色實線是各自原來的預定路徑,黑色實線是真正走的路線,會有點隨機擾動,但基本上跟預定路徑同方向,(i) 發現彼此可能相撞之後,開始調整路徑,改走虛線,到 (ii) 時兩者靠得最近,此時距離為 d,(iii) 擦身而過後進入互相遠離,又會把路徑調整到與通道平行的方向,但是跟原來的預定路徑有個平移。 圖/參考文獻 1 圖四中互相靠近的兩人,原本的預定路徑,也就是兩條灰色實線的距離太近,如果堅持往前走就會撞在一起,所以靠近到某一個距離就會開始調整方向,把路徑距離拉開避免碰撞 (現實中還會有兩個人很有默契的往同一邊閃、再同時換邊、再同時換邊……一直閃不開的爆笑場景,這篇論文中倒是沒有討論),然後再互相遠離。
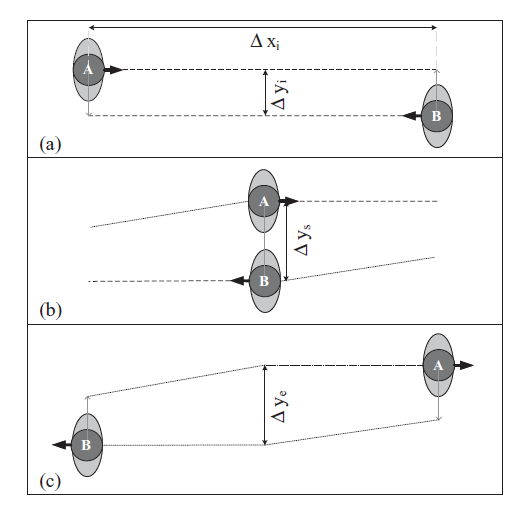
由於真實的路徑歪七扭八,加上每個人開始轉彎的時機也不盡相同,所以我們再度發揮「化約主義」的精神,把圖四簡化成圖五。
圖五:AB 兩人互相接近、閃避、遠離的簡化示意圖。 圖/參考文獻 1 我們採用直角座標系,把通道方向(也是人流移動的分向)定義為 X 方向,垂直 X 的為 Y 方向,當大家都沿著 X 方向移動時,「會不會碰撞」是由 Y 方向的距離所決定。當兩人進入畫面時,兩條路徑的距離為 Δyi ,兩人擦身而過時的距離為 Δys ,遠離後的路徑距離為 Δye 。
在物理模型方面,得在「一個人的朗之萬模型」裡面加上「兩個人的交互作用力」,這個力分為兩部分:
「遠遠看到前方有人走過來該準備閃了」的「長程力」 「靠快撞到了趕快閃」的「短程力」 兩者都可以用數學函數寫出來加進方程式,成為「兩個人的朗之萬模型」。
研究團隊量了所有「雙節點子圖」的 Δyi ,Δys ,Δyie ;同時也以「兩個人的朗之萬模型」在電腦上模擬了行人的行為並且量測了這三個數值,然後畫了 e(Δys ) 對 Δyi 的關係圖,其中 e(Δys ) 為對應於同一個 Δyi 的所有 Δys 的平均值;以及 e(Δye ) 對 Δys 的關係圖,分別為圖六 (a) 與 (b)。
再一次,真實世界的行人行為(紅點)與電腦模擬(虛線)相當吻合。此外,這個模型連「發生相撞」的頻率都可以預測得很準。難道人類行為真的跟隨波逐流的布朗運動一樣?!
圖六:(a) 兩個人擦身而過時的距離平均值與起始路徑距離的關係。(b) 兩人互相遠離後的路徑距離平均值與擦身而過時的距離的關係。紅點為真實世界的人類行為,虛線為電腦模擬結果,通過原點的點線為兩人都不改變方向直直往前走的情形。 圖/參考文獻 1 每個人都有 AT 力場,半徑 1.4 公尺 值得注意的是,當 Δyi 較小時,互相走近的兩人會開始調整方向,把距離拉開,讓兩人擦身而過時,不至於撞到(Δy > 0.6m)。有趣的是,這個現象從 Δyi < 1.4m 就開始發生,在 0.6m~1.4m 這個範圍內,即使不改變方向,也不會撞到,但是這個距離已經夠近,讓人感到「個人領域受到侵犯」的威脅,而開始迴避對方,把距離拉開。
也就是說,在擁擠的通道中,「讓人安心的社交距離」是 1.4 公尺(我是很想把它叫做「AT-Field 絕對領域」啦…),我們不太想讓陌生人靠近到這個距離以內。要提醒各位的是,這是「一大堆人的行為」的平均值,並不是每個人都是同一個數值。
雖然說得到的是「搞笑諾貝爾獎」,不過這個研究過程可是很嚴謹的,一點也不搞笑。 這個研究也說明了,個人的想法跟行為很複雜,人與人之間的互動很複雜,但是一大堆人的行為平均起來,可能會呈現簡單的模式,可以用物理學的「化約主義」方法,來理解「人類群體的行為」。
當然這還是相當初步的研究,而車站裡移動的人潮,也不過是人類的社會行為中一個非常簡單的現象,所以想用物理學的方法論,來研究社會科學,還有很長的路要走(而且社會科學家可能也會不高興)。
但是在物聯網越來越盛行的今日,各式各樣的人類活動被轉換成大量的資料累積下來,可以預見研究人類行為的方式會越來越多樣化。到最後會不會出現像艾希莫夫的科幻經典「基地系列」中,可以預知人類未來命運,並且扭轉其方向的「心理歷史學」呢?讓我們繼續看下去——
※ 更多搞笑諾貝爾的相關介紹,請到泛科專題【不認真就輸了!搞笑諾貝爾獎】
參考文獻 Alessandro Corbetta, Jasper A. Meeusen, Chung-min Lee, Roberto Benzi, and Federico Toschi, Physics-based modeling and data representation of pairwise interactions among pedestrians , Phys. Rev. E 98 , 062310 (2018).


 NGC 5907是個位在天龍座方向的螺旋星系,星系的銀暈中有由恆星組成的巨大環圈構造。經由中國科學院及巴黎天文臺的科學家王建嶺(Jianling Wang)等人的研究,利用電腦模擬20,000~600萬個氣體質點的流體力學的成果,認為這個巨大的恆星環構造可能是80~90億年前一場龐大的星系碰撞事件造成的。
NGC 5907是個位在天龍座方向的螺旋星系,星系的銀暈中有由恆星組成的巨大環圈構造。經由中國科學院及巴黎天文臺的科學家王建嶺(Jianling Wang)等人的研究,利用電腦模擬20,000~600萬個氣體質點的流體力學的成果,認為這個巨大的恆星環構造可能是80~90億年前一場龐大的星系碰撞事件造成的。