「我們正在做夢?」「妳其實是在進行中的工作坊睡覺,這是共享夢境的第一課。保持冷靜。」[1] 電影《全面啟動》(Inception)於夢裡互動的概念,被美、德、法和荷蘭的科學家,以非常初階的形式實現。2021 年 4 月《當代生物學》(Current Biology)期刊的論文,稱之為「互動式做夢 」(interactive dreaming)。[2]
電影《全面啟動》的預告片說:「在夢裡,我們覺得真實;醒來後,才明白事有蹊蹺。」圖/Inception (2010) on IMDB 清醒夢 一個人睡醒後,描述的夢境記憶,多半相當殘破。要是做夢時,能與科學家雙向對談,勢必有利研究。然而,人們易於接受夢裡的經歷,鮮少在當下檢視批判,根本沉迷其中。[2] 就像電影預告片所言:「在夢裡,我們覺得真實;醒來後,才明白事有蹊蹺。」[1] 唯獨於睡眠的快速動眼期 (rapid eye movement sleep),某些人會有罕見的清醒夢 (lucid dreams),意識到自己正在夢境之中。這種情形似乎提供了科學家即時訪談的契機。無奈清醒夢一般為自然發生,時機難以掌控。[2] 倘若能將任何夢境,轉換為清醒夢,那就方便得多。
電影《全面啟動》的主角靠陀螺是否持續旋轉,分別夢境和現實。圖/Inception (2010) on IMDB 標的清醒再活化 電影畫面上,陀螺不合理地無止盡旋轉,主角提醒他的雇主:「這個世界不是真的。」[1] 陀螺是否會停止並倒下,為《全面啟動》中判定虛實的經典線索。換句話說,也是由做普通的夢,轉變為做清醒夢的關鍵 。臨床試驗中,進行標的清醒再活化 (targeted lucidity reactivation)時,這類線索就是聲音 或光線 等感官刺激。受試者先認識設定來代表清醒的線索,並於即將入睡前加強此連結;睡著且進入快速動眼期後,科學家再次給出的線索,會暗示正在做夢的受試者保持清醒。 [2]
就拿此研究裡,美國組的流程為例:首先,科學家設定短促輕柔(650 ms;40-45 dB),音調漸升(400、600和800 Hz)的「嗶、嗶、嗶」三個音,作為線索。訓練受試者將之與清醒的狀態連結。再告訴他們這個線索會出現在睡覺時,以促成清醒夢。接下來的 15 分鐘內,反覆播放 15 次。前 4 次搭配語音指示:「當你聽到線索,你就會清醒。專注於你的思考,並注意心思的流向…(停頓)現在觀察你的身體、知覺和感受…(停頓)觀察你的呼吸…(停頓)維持清醒,保有批判的意識,注意此經驗在哪方面與你平常清醒時不同。」[2]
受試者通常會在 15 次「嗶、嗶、嗶」結束前睡著。科學家一旦偵測到他們進入快速動眼期,就會以 30 秒為間隔,再度重複播放。當受試者以事前約定好的眼球運動,通知外界他正在做清醒夢,或是在 10 次「嗶、嗶、嗶」後,仍然毫無動靜,互動測試便開始進行。[2][註]
互動式做夢 美、德、法和荷蘭的科學家,總共招募了 36 名志願者。他們涵蓋下列 3 種類型:[2]
數名具清醒夢經驗的人 。[2] 幾個雖無經驗,但訓練後能做清醒夢的健康人士 。[2] 白天睡眠過多,容易突然進入快速動眼期,又常做清醒夢的猝睡症 (亦稱「嗜睡症」;narcolepsy)患者 1名。[2] 他們在做夢時答覆提問;醒來後立即報告夢境與感受。期刊論文中,列舉了下面幾個例子。[2]
互動式做夢示意圖。圖/參考資料 2,Figure 1(CC BY 4.0) 美國組:計算 曾有過 2 次清醒夢的 19 歲美國受試者,在 90 分鐘的白天睡眠過程中,回答簡單的計算問題。首先,他以 3 次連續的眼球左右運動,表達自己進入了清醒夢。於是,科學家就問他「8 減掉 6」等於多少。約莫 3 秒內,他做了 2 次上述的眼球運動。科學家馬上又重複問題,他也再度用相同的方式,給予正確答案。[2]
醒來之後,這名美國男子分享其經歷:「本來是夜間,於一處停車場。…然後是白晝,我在電玩裡。…我想,好,大概是在做夢。接著很怪…我失去對全身肌肉的控制。有一陣血流洶湧的浪濤聲,朝我的耳朵襲來。」此外,他依稀記得當時的題目與答案。[2]
美國組:右下的 2 個小橙框,圈出快速動眼期(REM)作答時,眼電圖(EOG)的波動。圖/參考資料 2,Figure 2(CC BY 4.0) 德國組:計算 在德國,也有曾做過清醒夢的受試者。這名 35 歲的男子,在夜間睡眠的快速動眼期,以眼球運動表示自己進入了清醒夢。科學家就用 LED 燈改變房間的光線,來發出摩斯密碼。那串訊號的意思是「4 減去 0」,事前受過訓練的男子,則以 4 次左右交替的眼球運動答覆。看起來是答對了,但是他醒來後說,以為題目是「4 加上 0」。[2]
德國男子覺得夢裡的場景,可能是物理治療診所。四周無人,只有架子、櫥櫃和醫師的座椅。當診間的燈光忽明忽滅,他「意識到閃爍的訊號來自外面」,便運動眼球作答。之後,男子尋找發光工具,弄到一只碗。裏頭盛滿的水,竟像魚缸燈管般發出明滅光芒。他知道,又是訊號。偏偏無法判讀,還不小心在解碼時把碗摔破。[2] [2]
德國組:小橙框圈出快速動眼期(REM)作答時,眼電圖(EOG)的波動。圖/參考資料2,Figure 3(CC BY 4.0) 荷蘭組:計算 26 歲的荷蘭受試者,因為記得夢中的細節,並正確回答「1 加上 2」等於「3」,而感到自豪。可惜她在 134 分鐘晨眠的清醒夢起始點,沒有通知科學家,所以儘管 5 題對了 2 題,數據並未允予採計。[2]
「我必須記得事情」,她在夢裡這麼想著,並聽到科學家的聲音。「我坐進車裡…」,那些題目「感覺像是某種車上的廣播」。[2]
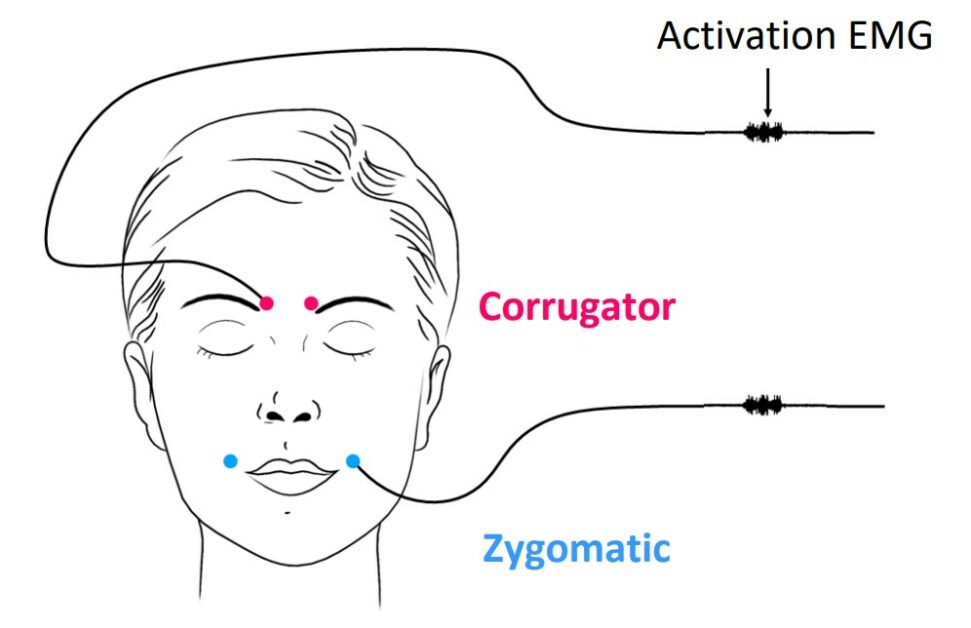
荷蘭組:小橙框圈出快速動眼期(REM)作答時,眼電圖(EOG)的波動。圖/參考資料2,Figure 5(CC BY 4.0) 法國組:是非題 法國組招募到 1 名 20 歲的猝睡症患者,他於 16 歲確診,每天平均做 4 次清醒夢。論文形容他「做清醒夢的能力卓越」,能輕易控制夢境。在 20 分鐘白天小睡的第 1 分鐘,他就火速進入快速動眼期,並且於 5 分鐘後開始做清醒夢。科學家問是非題,請他收縮臉部肌肉作答:顴肌(zygomatic muscle)代表「是」;而皺眉肌( corrugator muscle)則為「非」。[2]
收縮臉部肌肉:(藍)顴肌代表「是」;而(紅)皺眉肌則為「非」。圖/參考資料2,Figure S6(CC BY 4.0) 「我聽到你的聲音,你簡直像上帝。」猝睡症患者回憶夢裡的派對上,出現猶如電影旁白,來自外面的幾個問題,例如:愛不愛吃巧克力;是否唸生物學;還有會不會講西班牙語。「最後一題我不確定,因為我的西班牙語不流利…終究我決定答『否』,然後回到派對裡去。」[2]
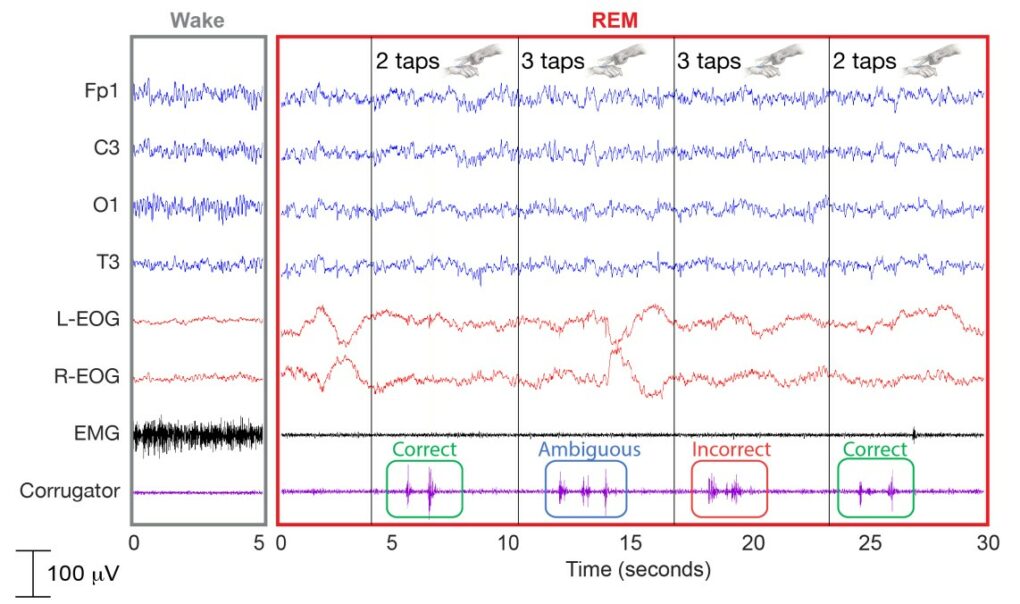
法國組:小紫框圈出快速動眼期(REM),針對「是否看足球賽」,用皺眉肌(corrugator muscle),回答「否」的肌電圖(EMG)波動。圖/參考資料2,Figure 4(CC BY 4.0) 法國組:觸覺 這名法國的猝睡症患者,還有參與觸覺等其他測試。他在清醒夢的過程中,以收縮皺眉肌的次數,來表達自己的手被科學家輕觸了幾下。其答案有時正確,有時錯誤,還有的模稜兩可。[2]
法國組:小框框圈出用皺眉肌(corrugator muscle),做正確(綠)、錯誤(橙),以及模糊(藍)答案時,肌電圖(EMG)的波動。圖/參考資料 2,Figure S4(CC BY 4.0) 雖然沒有全部答對,但能有此成績,說來也頗不簡單。畢竟他當時正在清醒夢中打怪,並且對自己「能一心這麼多用」,感到吃驚。[2]
互動式做夢的成功率 「這或許可行。」《全面啟動》裡,討論任務計劃時,不意外地下一句台詞就是:「或許?我們需要比『或許』更肯定。」[1] 在此研究中,四個國家的團隊,總共做了 57 場互動式做夢的嘗試:26% 的場次裡,受試者依照指示,告知科學家自己進入了清醒夢;而這些成功案例中的 47%,至少答對 1 個題目。整個臨床試驗的答題正確率,僅約 18.4%;多數則是連反應也沒有,其比例高達 60.1%。[2]
目前互動式做夢,仍有一些技術侷限,比方說:外界的提問在夢裡走樣;夢境描述依然仰賴事後回顧;受試者在清醒夢與沉睡的狀態間擺盪;或是標的清醒再活化的聲光,把人叫醒等。不過無論如何,科學家已經得知提問的聲音,如何在夢中呈現:有些像天外之音;有的則會合理化地融入夢境。而且研究結果不僅證實做夢者與外界互動的可能,更展現睡夢中的認知能力。有別於以往,只能在人醒著的各種狀態下試驗;將來科學家應該有機會,比較包含清醒夢在內,不同清醒程度的認知表現,甚至影響夢境內容,來治療心靈創傷或增強學習效果。[2]
備註 美國與荷蘭兩組,皆採取標的清醒再活化,但細節稍有差異;法國的猝睡症患者天賦異稟,無須借助外力;而德國組則是睡著後被叫醒,然後又回去睡覺,並在之間做自我暗示的夢境辨識等練習。[2]
參考資料 ‘Inception (2010) – Quotes ’. IMDB. (Accessed on 15 FEB 2023) Konkoly KR, Appel K, Chabani E, et al. (2021) ‘Real-time dialogue between experimenters and dreamers during REM sleep ’. Current Biology, 31 (7): 1417-1427, e6.



































-200x200.jpg)