日本的史前居民繩文人,即使在台灣也有相當知名度。許多學者認為繩文人是日本人的祖先之一,但是繩文人對於現代的日本族群,遺傳貢獻究竟多大卻難以估量。而繩文人從何而來,也是爭論已久的問題。最近由繩文人遺骸取得 DNA 的遺傳學研究,對於這些問題提供了相當有用的線索,還意外發現繩文人與台灣原住民之間,有著非常古老的聯繫。

繩文人的時空範圍
繩文時期定義上,最早的草創期始於距今約 16,000 年前,接下來是早期、前期、中期、後期、晚期。各家對於草創期在何時開始、每一時期的分期認定有點出入。不過晚期都大概在 2,350 年前結束,隨後接續到彌生時期。
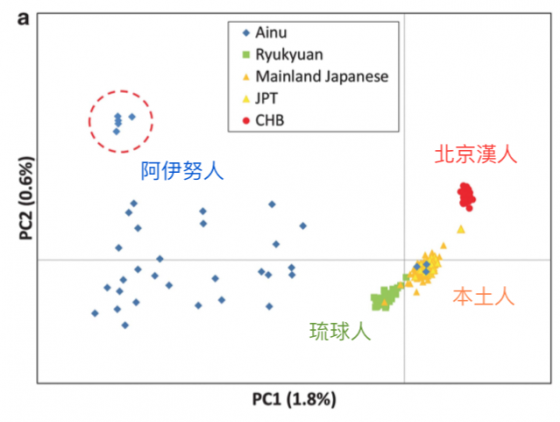
如今的日本國土,各處都有繩文人遺址的分佈,包括最北方的北海道、最南方的琉球群島,以及介於其間的本州等國土。有一派說法認為,兩千多年前彌生人移民進入日本以後,只有北海道與琉球保留較多繩文人的元素。此一論點使得許多分析日本人的遺傳學研究中,將日本分為三個族群:北海道的阿伊努人、琉球人,以及其餘地區的「本土人」。
現代三個地方的族群,遺傳組成上確實能看出不太一樣,本土人比較接近北京漢人,與阿伊努人的差異最大,而琉球人介於其間,不過較為靠近本土人。1
若是將日本人視為繩文與彌生的合體,繩文人的遺傳比例佔有多少?假如把現代的阿伊努人當作繩文人,北京漢人或韓國人當作彌生人,用於估計本土人的血緣,不同方法略有出入,不過估計結果都不到 20%。但是無法克服的問題是,漢人不是彌生人,阿伊努人更不是真正的繩文人。這就能看出直接取得繩文人 DNA 的價值。

取得繩文人的DNA,身世終於要釐清啦
首度取得繩文人基因組的論文發表於 2016 年,兩位距今約 3000 年的繩文人住在本州東部,福島縣的三貫地貝塚(Sanganji)。儘管基因組非常殘缺,仍是值得紀念的第一篇論文。2
第二篇論文發表於 2018 年,報告愛知縣伊川津貝塚(Ikawazu),一位 2500 年前繩文人的基因組,不過這篇論文主要的研究範圍是東南亞,繩文人只佔其一小部分 3。第三篇論文於今年(2019 年)問世,2 件樣本來自北海道的船舶遺址(Funadomari),距今 3500 到 3800 年4。第四篇論文則是進一步分析伊川津貝塚的樣本,論文尚未正式發表,作者先將初稿上傳網路5。
目前繩文人的古代基因組已經有 5 個樣本,共 4 篇論文問世,對於釐清繩文人的身世很有幫助。
東亞大家族的一員,很早離開大家
歐亞大陸東方與西方的人類族群,遺傳上大概分開 4 萬年左右。繩文人比較接近東方族群,故可以推論繩文人是東西大分家以後才誕生的遺傳族群。然而繩文人和東方各族群,包括美洲原住民比較的結果是,繩文人與大家的分歧程度都差不多,表示他們與眾人分離的年代,處於現代各東方族群分家以前,或是很初期的階段。
美洲原住民遺傳上,保守估計最初在 2.6 萬年前與其他東亞族群分家,而繩文人或許又早於此一年代。綜合起來就是:繩文人遺傳上誕生的年代介於 2.6 到 4 萬之間。
- 延伸閱讀:北境永不遺忘,西伯利亞,美洲人的交流分合
再考慮到本州島最早的遺址是 3.8 萬年前,比距今 1.6 萬年開始的繩文時期更早很多;由此可以推測,繩文人遺傳上或許傳承自更早來到日本的祖先,於 1.6 萬年前出現文化轉變而進入繩文時期。
東南亞或東北亞,繩文人從哪裡來?
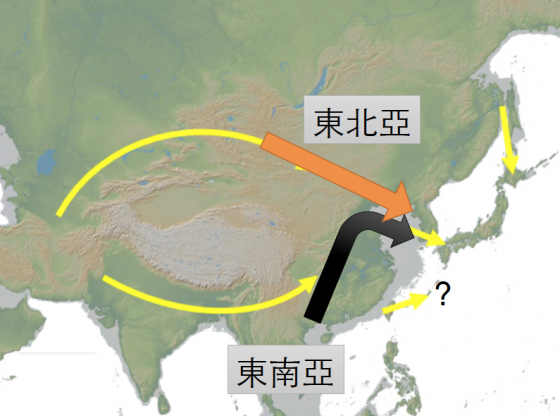
繩文人住在日本,關於他們的來歷,主要有東南亞、東北亞兩種說法。東南亞說的支持者認為,智人祖先離開非洲以後,一群人先來到東南亞,繩文人的祖先之後離開大家,一路向北,最後抵達日本。東北亞說的支持者則主張,繩文人的祖先是直接由東北亞進入日本。
要注意的是,對於繩文人祖先由哪裡進入日本,兩套說法不見得有差異,抵達日本的前一站都可以是朝鮮半島,分歧關鍵在於更早以前的經歷。目前的古代 DNA 分析比較支持「繩文人來自東南亞」的論點,但是考古上,也能見到繩文人與東北亞在文化、科技上的交流。
延伸閱讀:
- 短篇 沖繩島海洋世界-世界最早的魚鉤,很多跟海有關的東西
- 東京國立博物館,繩文特展-一萬年的美的鼓動
- 短篇 早期繩文人的陶器,就是要裝水產
- 大量日本古狗墓葬,反映狗是繩文人的狩獵好夥伴
- 航向琉球的草船──日本人起源探秘
- 福島繩文人DNA 揭露日本史的未知境地
參考文獻:
- Jinam, T., Nishida, N., Hirai, M., Kawamura, S., Oota, H., Umetsu, K., … & Tanabe, H. (2012). The history of human populations in the Japanese Archipelago inferred from genome-wide SNP data with a special reference to the Ainu and the Ryukyuan populations. Journal of Human Genetics, 57(12), 787.
- Kanzawa-Kiriyama, H., Kryukov, K., Jinam, T. A., Hosomichi, K., Saso, A., Suwa, G., … & Inoue, I. (2016). A partial nuclear genome of the Jomons who lived 3000 years ago in Fukushima, Japan. Journal of Human Genetics.
- McColl, H., Racimo, F., Vinner, L., Demeter, F., Gakuhari, T., Moreno-Mayar, J. V., … & Wasef, S. (2018). The prehistoric peopling of Southeast Asia. Science, 361(6397), 88-92.
- KANZAWA-KIRIYAMA, H. I. D. E. A. K. I., JINAM, T. A., KAWAI, Y., SATO, T., HOSOMICHI, K., TAJIMA, A., … & SHINODA, K. I. (2019). Late Jomon male and female genome sequences from the Funadomari site in Hokkaido, Japan. Anthropological Science, 190415.
- Gakuhari, T., Nakagome, S., Rasumussen, S., Allentoft, M., Sato, T., Korneliussen, T., … & Mizushima, S. (2019). Jomon genome sheds light on East Asian population history. bioRxiv, 579177.
本文亦刊載於作者部落格《盲眼的尼安德塔石匠》暨其 facebook 同名專頁。
想親耳聽聽繩文人的故事嗎?歡迎參加 2019 年 9 月 14 日在台中象仔書屋免費特別講座:『繩文人的dna,大家愛的暴龍,還有很多很多書』