上個月於日本舉行的 CEATEC 2011 展出不少款 3D 顯示器,紛紛以「裸眼(glasses-free)」這項特色做為號召,不過在其中一款 3D 顯示器簡報中所提到的技術格外令人感興趣。日本筑波大學(Tsukuba University)的研究者展示一款 3D 顯示器原型,那在焦深(focal depth)上運用了多層次透鏡並強化 3D 影像的深度知覺。當前方物體位於焦距內時,後方的就會變模糊。當你觀看位於後方的物體時,那些在前方的就會變模糊。
在 CEATEC 之外,掛谷教授的研究聚焦在利用粗整合體積成像(coarse integral volumetric imaging,CIVI)的精確深度知覺上。這在最近的一篇論文中被定義成:藉由引進多層次化結構,結合多視角(multi-view)與體積解(volumetric solutions)以整合成像的 3D 顯示技術。
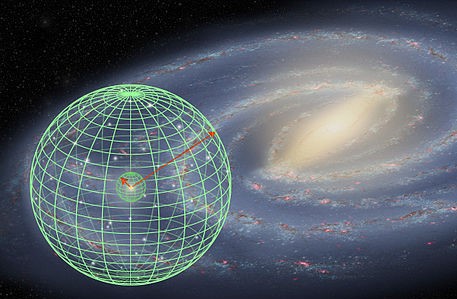
圖 3:哈伯太空望遠鏡所能精準定位距離的恆星範圍。內層是過去的極限約1,600光年,外圈是現在的極限,約10,000光年。雖然已經很厲害了,但其實連銀河系都還看不穿。圖/改自 NASA, ESA, A. Feild (STScI), A. Riess (JHU/STScI), S. Casertano (STScI/JHU), J. Anderson and J. MacKenty (STScI), and A. Filippenko (University of California, Berkeley)


 上個月於日本舉行的 CEATEC 2011 展出不少款 3D 顯示器,紛紛以「裸眼(glasses-free)」這項特色做為號召,不過在其中一款 3D 顯示器簡報中所提到的技術格外令人感興趣。日本筑波大學(Tsukuba University)的研究者展示一款 3D 顯示器原型,那在焦深(focal depth)上運用了多層次透鏡並強化 3D 影像的深度知覺。當前方物體位於焦距內時,後方的就會變模糊。當你觀看位於後方的物體時,那些在前方的就會變模糊。
上個月於日本舉行的 CEATEC 2011 展出不少款 3D 顯示器,紛紛以「裸眼(glasses-free)」這項特色做為號召,不過在其中一款 3D 顯示器簡報中所提到的技術格外令人感興趣。日本筑波大學(Tsukuba University)的研究者展示一款 3D 顯示器原型,那在焦深(focal depth)上運用了多層次透鏡並強化 3D 影像的深度知覺。當前方物體位於焦距內時,後方的就會變模糊。當你觀看位於後方的物體時,那些在前方的就會變模糊。