車輛中心的團隊研發出all in one複合式全景影像系統(以下簡稱all in one),藉由硬體的整合和軟體的設計,在單一運算單元有限的運算能力下實現多種影像功能。此系統以四顆具有190度廣角攝影機為基礎,擷取車輛周圍的影像資訊,再藉由軟體和硬體的整合,成為擁有全周影像系統、車道偏移偵測系統、盲點警示系統和停車輔助系統等四項影像輔助功能的複合式影像系統,也是目前市場上唯一具備多功能的影像系統。車輛中心陳建次副專說:「過去沒有人做過(硬體整合)這件事。」這項突破性的整合軟硬體技術也榮獲國家發明獎和國內外發明競賽的大獎。
車輛中心-陳建次副專
四種影像安全系統一次滿足
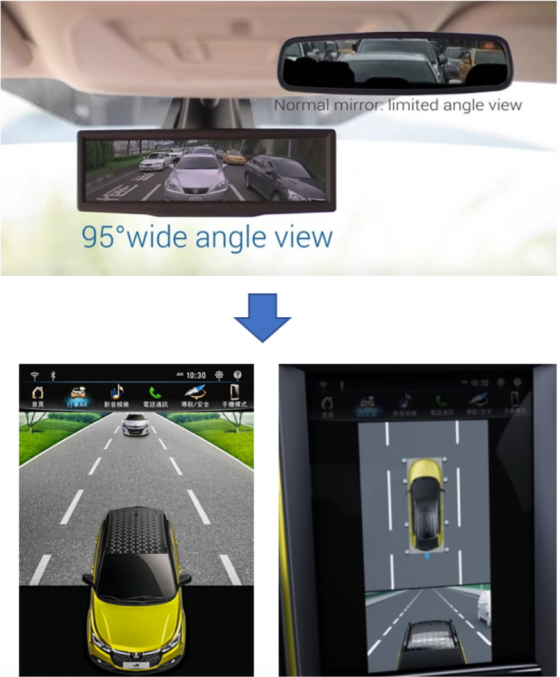
all in one所結合的四項功能可在許多情況下滿足影像輔助的需求,全周影像系統利用車身前後左右的四個鏡頭捕捉影像,透過影像座標轉換,將四個方向的影像即時動態縫合,在螢幕上呈現車身周圍的鳥瞰畫面,讓駕駛一目了然地看到車身周圍的環境。盲點警示系統利用車身左右、後方的鏡頭,呈現駕駛視線的死角,若有物體接近車身,也會發出警告提醒駕駛。車道偏移系統確保駕駛行駛在適當的車道上,若駕駛在高速公路上精神不濟,行駛路線偏移,系統就會發出警示,提醒駕駛集中注意力。倒車輔助系統讓駕駛在螢幕上看到車輛後方的影像,並標示倒車路線供駕駛參考。
-----廣告,請繼續往下閱讀-----
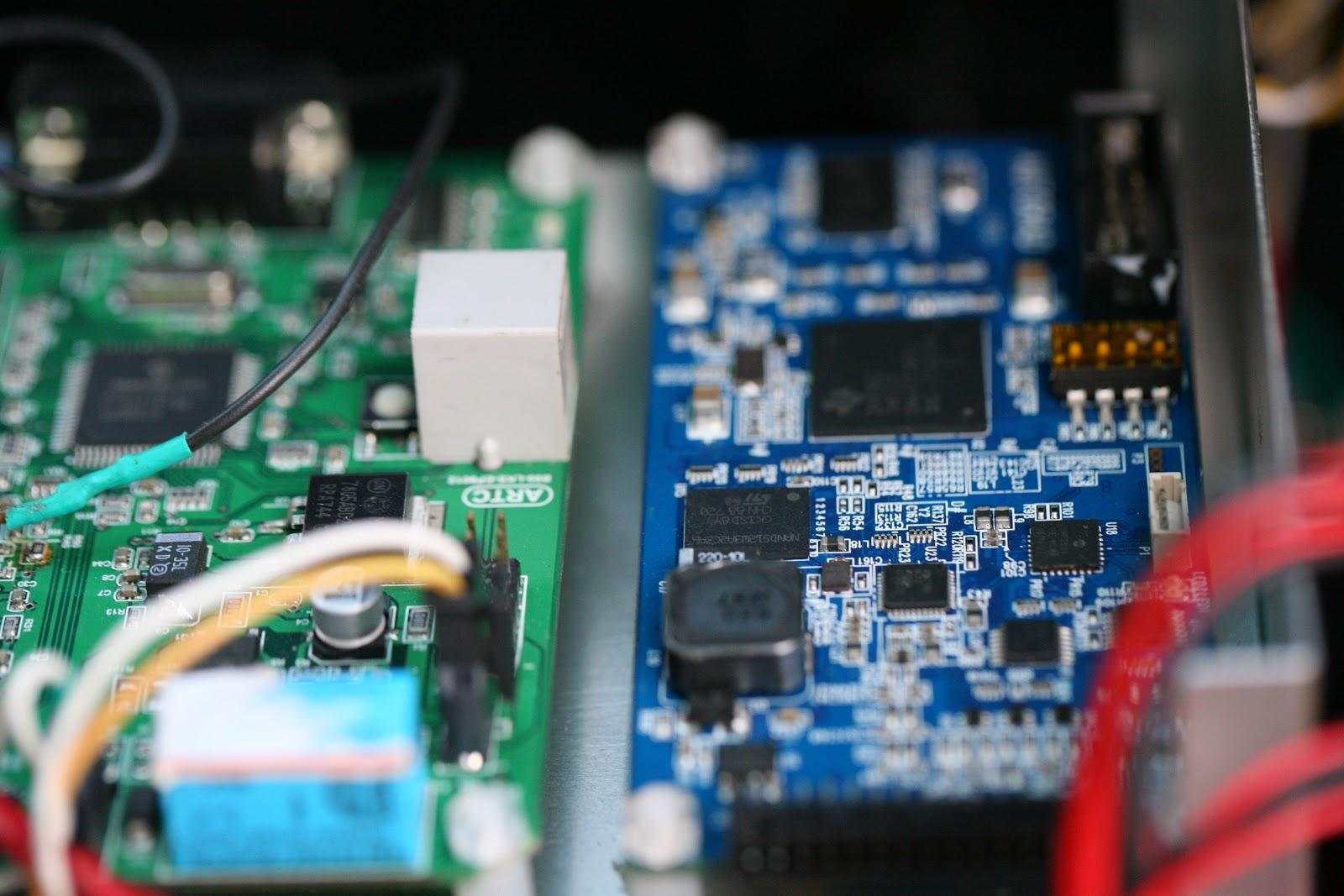
原本,每一個單獨的影像系統都有各自的ECU,但四個系統就要有四塊電路板,不同的影像系統也有各自的鏡頭。依據運算能力,ECU上的影像運算系統分為高速和低速兩種,低速影像運算系統能夠負荷低速或低解析度的影像,但高速移動或高解析度的影像需要使用高速運算系統。陳副專表示,all in one在硬體上最大的突破,就是將高速影像運算單元跟低速影像運算單元整合在同一塊ECU上,可以節省晶片的使用量,也併用了鏡頭,降低系統成本,更提供未來擴增功能的機會。
All in one功能示意圖,AVM:全週影像,WLDW:車道偏移系統,PA:倒車輔助。盲點警示系統在模型卡車上的展示,紅車靠近卡車後,螢幕的左方畫面會發出警示all in one複合式影像安全系統將高速影像系統和低速影像系統整合在同一塊ECU上。
自動切換影像功能 維持精簡運算量
要讓all in one的四個功能在一塊ECU有限的運算能力下流暢運行,則有勞軟體的管理。研究團設想了各種駕駛情境以及該情境所需的輔助影像,依照重要性排列各個功能的優先順序,車輛行駛時只要掌握車輛的時速、檔位、方向燈等訊息,軟體就能推估當下的情境,自動切換到最重要的功能,關閉不需要的功能,並調低次要功能的解析度,以降低運算的負荷量。例如,高速公路上行駛的車輛需要車道偏移系統及盲點警示系統,當駕駛「度估」失去方向時、或有車輛逼近時,系統會發出警示提醒駕駛提高警覺,而全周影像和倒車輔助這兩項功能則可關閉。
車輛中心的all in one複合式全景影像系統已經相當成熟,目前正在與許多系統商和台灣大車隊、和欣客運、台北客運、首都客運、新竹物流等車隊積極合作,進行不同程度的功能試運行,合作的車隊有小客車、大客車、貨車等,駕駛環境也涵蓋市區和高速公路,從司機的訪談中,研發團隊可以得到使用者在不同車種、環境下的經驗回饋,進而優化功能。
All in one 目前整合了車輛中心過去自行研發的四個影像技術,有了這個成功經驗,研究團隊未來將進一步整合駕駛者監控、前方防撞、全周影像式障礙物系統和倒車影像式障礙物系統,發展成八合一的影像系統,一次實現目前市場上所有的影像功能。
他叫多蘿西‧萊維(Dorothy Elizabeth Levitt),是英國第一位女賽車手,也是女性主義的先鋒,在上(20)世紀初的英國汽車才發明不久,開車的男生少,開車的女生更是罕聞。當時極少人可以接受女生開車,就連他的老師都嫌棄他是個女生,很不情願地教導。而且,早期的學車不僅要會開,還要會維護保養修理,與今日車手只專注於操駕大大不同。
車輛中心的團隊研發出all in one複合式全景影像系統(以下簡稱all in one),藉由硬體的整合和軟體的設計,在單一運算單元有限的運算能力下實現多種影像功能。此系統以四顆具有190度廣角攝影機為基礎,擷取車輛周圍的影像資訊,再藉由軟體和硬體的整合,成為擁有全周影像系統、車道偏移偵測系統、盲點警示系統和停車輔助系統等四項影像輔助功能的複合式影像系統,也是目前市場上唯一具備多功能的影像系統。車輛中心陳建次副專說:「過去沒有人做過(硬體整合)這件事。」這項突破性的整合軟硬體技術也榮獲國家發明獎和國內外發明競賽的大獎。
車輛中心-陳建次副專
-----廣告,請繼續往下閱讀-----
四種影像安全系統一次滿足
all in one所結合的四項功能可在許多情況下滿足影像輔助的需求,全周影像系統利用車身前後左右的四個鏡頭捕捉影像,透過影像座標轉換,將四個方向的影像即時動態縫合,在螢幕上呈現車身周圍的鳥瞰畫面,讓駕駛一目了然地看到車身周圍的環境。盲點警示系統利用車身左右、後方的鏡頭,呈現駕駛視線的死角,若有物體接近車身,也會發出警告提醒駕駛。車道偏移系統確保駕駛行駛在適當的車道上,若駕駛在高速公路上精神不濟,行駛路線偏移,系統就會發出警示,提醒駕駛集中注意力。倒車輔助系統讓駕駛在螢幕上看到車輛後方的影像,並標示倒車路線供駕駛參考。
原本,每一個單獨的影像系統都有各自的ECU,但四個系統就要有四塊電路板,不同的影像系統也有各自的鏡頭。依據運算能力,ECU上的影像運算系統分為高速和低速兩種,低速影像運算系統能夠負荷低速或低解析度的影像,但高速移動或高解析度的影像需要使用高速運算系統。陳副專表示,all in one在硬體上最大的突破,就是將高速影像運算單元跟低速影像運算單元整合在同一塊ECU上,可以節省晶片的使用量,也併用了鏡頭,降低系統成本,更提供未來擴增功能的機會。
All in one功能示意圖,AVM:全週影像,WLDW:車道偏移系統,PA:倒車輔助。
盲點警示系統在模型卡車上的展示,紅車靠近卡車後,螢幕的左方畫面會發出警示
-----廣告,請繼續往下閱讀-----
all in one複合式影像安全系統將高速影像系統和低速影像系統整合在同一塊ECU上。
自動切換影像功能 維持精簡運算量
要讓all in one的四個功能在一塊ECU有限的運算能力下流暢運行,則有勞軟體的管理。研究團設想了各種駕駛情境以及該情境所需的輔助影像,依照重要性排列各個功能的優先順序,車輛行駛時只要掌握車輛的時速、檔位、方向燈等訊息,軟體就能推估當下的情境,自動切換到最重要的功能,關閉不需要的功能,並調低次要功能的解析度,以降低運算的負荷量。例如,高速公路上行駛的車輛需要車道偏移系統及盲點警示系統,當駕駛「度估」失去方向時、或有車輛逼近時,系統會發出警示提醒駕駛提高警覺,而全周影像和倒車輔助這兩項功能則可關閉。
車輛中心的all in one複合式全景影像系統已經相當成熟,目前正在與許多系統商和台灣大車隊、和欣客運、台北客運、首都客運、新竹物流等車隊積極合作,進行不同程度的功能試運行,合作的車隊有小客車、大客車、貨車等,駕駛環境也涵蓋市區和高速公路,從司機的訪談中,研發團隊可以得到使用者在不同車種、環境下的經驗回饋,進而優化功能。
All in one 目前整合了車輛中心過去自行研發的四個影像技術,有了這個成功經驗,研究團隊未來將進一步整合駕駛者監控、前方防撞、全周影像式障礙物系統和倒車影像式障礙物系統,發展成八合一的影像系統,一次實現目前市場上所有的影像功能。