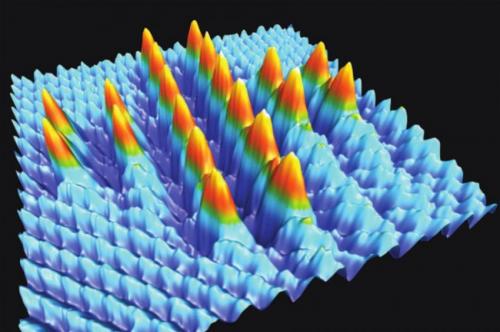
在這篇研究中,瑞士巴塞爾大學(University of Basel)的Ernst Meyer團隊使用了原子力顯微鏡(atomic force microscope)的針頭,將20個溴原子排在氯化鈉表面,每顆溴原子都替換掉了一個原本在該位置上的氯原子,構成一幅瑞士國旗的圖樣。這幅可能是世上最小的瑞士國旗面積僅有5.6平方奈米(奈米=10−9 米),且它的重要性在於,這是人們首次能在常溫下置換20個單原子,並且維持住它們穩定的結構。
Shigeki Kawai, Adam S. Foster, Filippo Federici Canova, Hiroshi Onodera, Shin-ichi Kitamura, and Ernst Meyer, Atom manipulation on an insulating surface at room temperature, Nature Communications , DOI: 10.1038/ncomms5403
但當時第一次世界大戰的主要參戰國家,如德、英、法、美等國為了避免影響士氣,嚴格管制媒體報導疫情。然而保持中立而未參戰的西班牙,因為沒有實施戰時審查制度,西班牙媒體自由報導著流感相關新聞,甚至連西班牙國王阿方索十三世(King Alfonso XIII)感染重症的消息也被廣泛報導,造成西班牙疫情特別嚴重的錯覺,也因此被命名為「西班牙流感」。
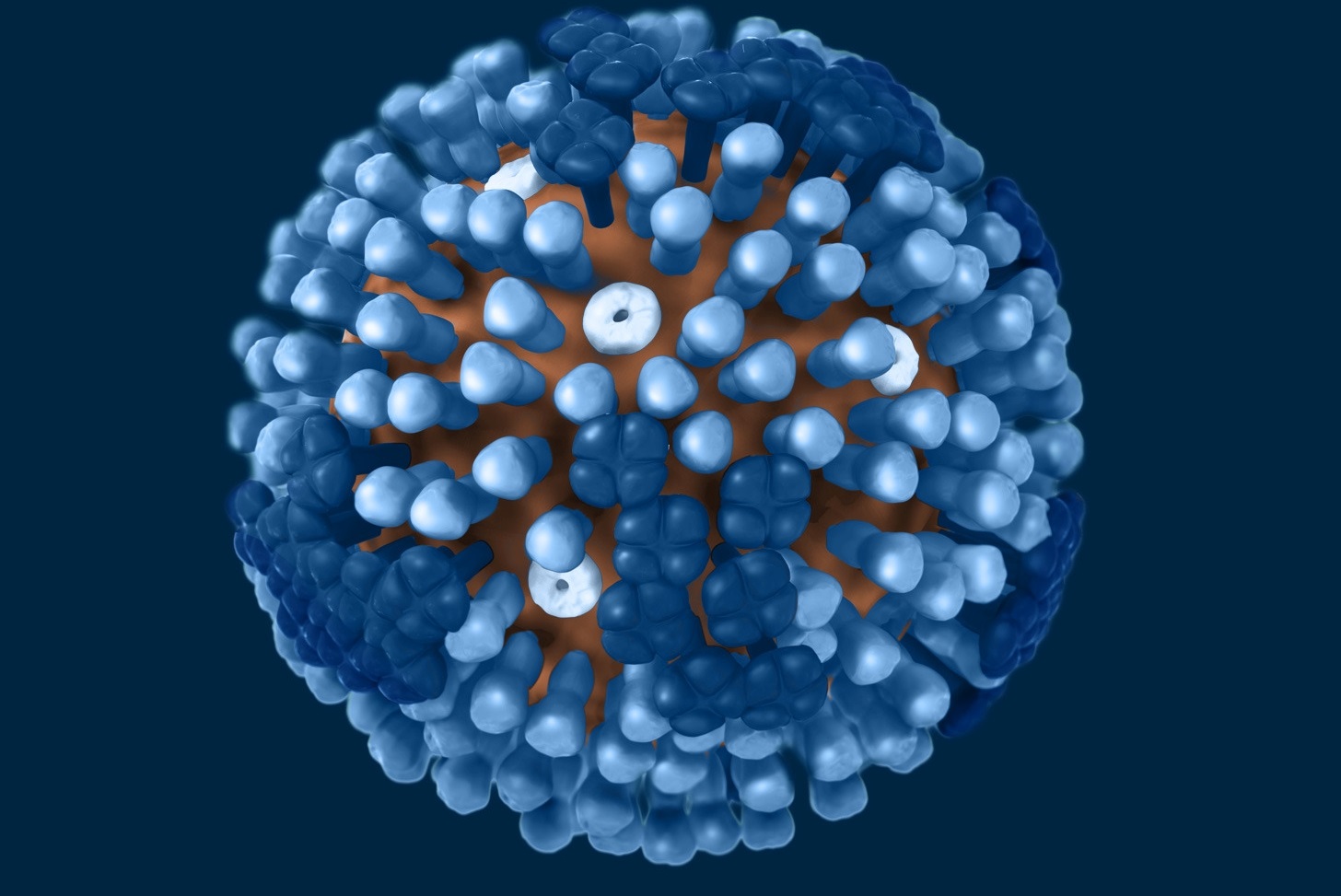
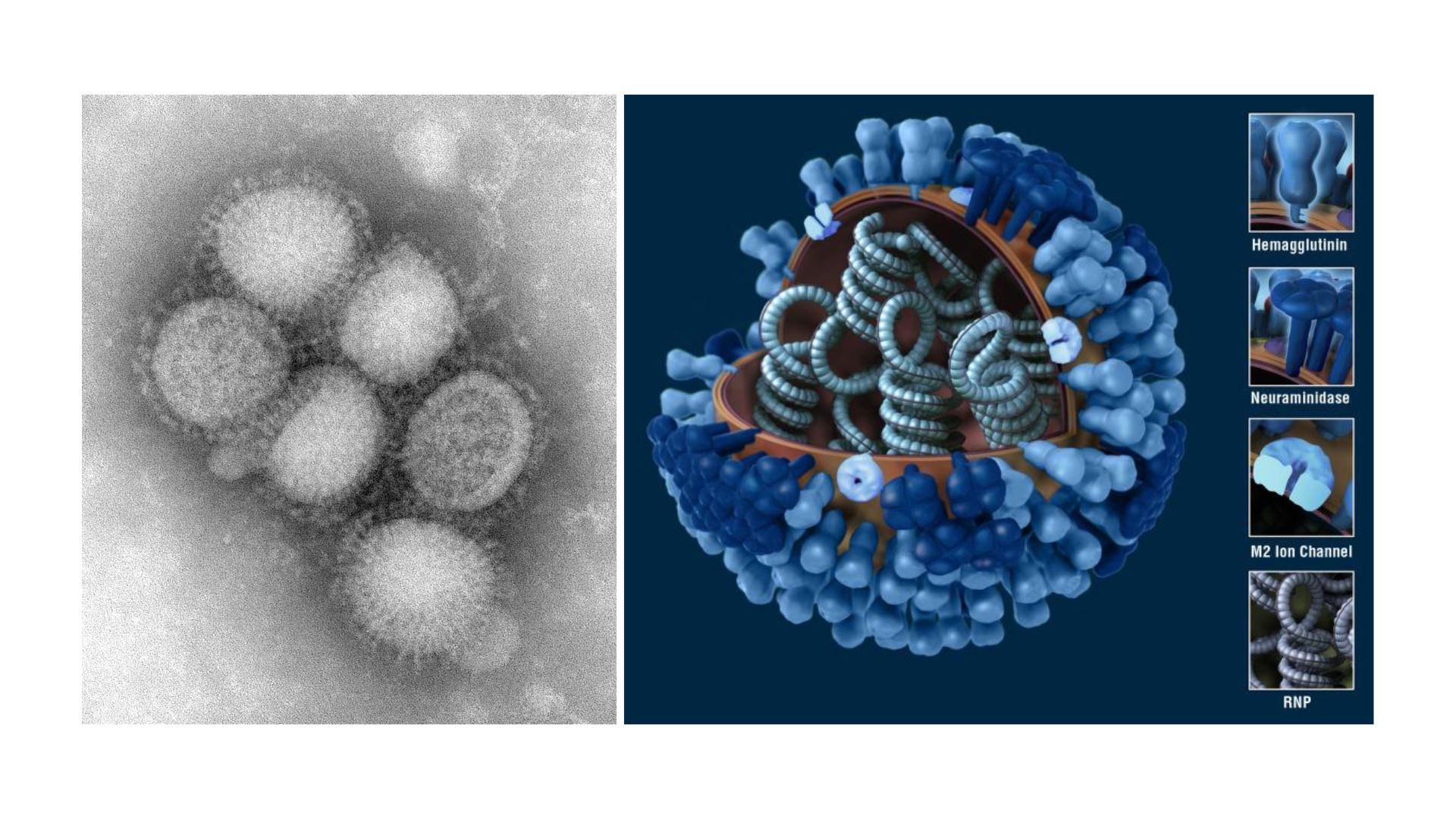
病毒外殼上還零星分布M2離子通道蛋白(M2 ion channel protein),但數量非常少,平均每100至200個HA,才有一個M2。套膜下則有M1基質蛋白(matrix protein M1)支撐病毒結構,維持病毒穩定。B型流感病毒的整體結構和A型非常類似,只是膜蛋白組成略有不同,除了HA和NA之外,另有兩種B型流感獨有的NB和BM2蛋白。至於C型流感病毒,外型就和A、B型明顯不同,它們在感染細胞表面時,能形成長達數百微米的「繩索狀結構」。
Bouvier, N. M., & Palese, P. (2008). The biology of influenza viruses. Vaccine, 26 Suppl 4(Suppl 4), D49–D53.
Berche P. (2022). The Spanish flu. Presse medicale (Paris, France : 1983), 51(3), 104127.
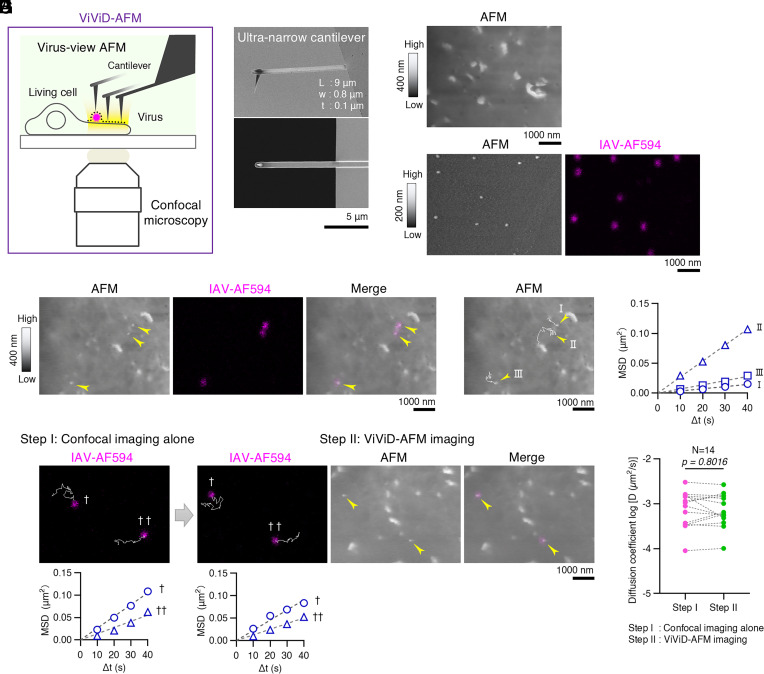
Yoshida, A., Uekusa, Y., Suzuki, T., Bauer, M., Sakai, N., & Yamauchi, Y. (2025). Enhanced visualization of influenza A virus entry into living cells using virus-view atomic force microscopy. Proceedings of the National Academy of Sciences of the United States of America, 122(38), e2500660122.







































{kind=link}