

美國萊斯大學的化學家James Tour與軍事用品公司洛克西德‧馬丁合作開發出一種塗料,可以幫海洋和空用雷達天線罩除冰,並且不會影響無線電波接收,穿透率很高。文章於12月11號刊載於美國化學學會期刊Applied Materials and Interfaces。
所謂的雷達天線罩,可以幫雷達裝置擋住凍雨(freezing rain)和冰,不過在天寒地凍的天氣中,這些雷達天線罩也需要除冰,免得損壞。目前多是用金屬支架支撐和加熱氧化鋁陶瓷,其缺點是重量很重,金屬部分也要離裝置很遠,避免干擾雷達。

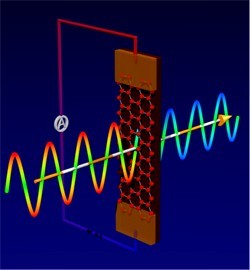
「而且氧化鋁陶瓷非常難加熱,需要耗很多能量,因為導熱很差。」Tour表示。而只有幾個原子厚的石墨烯則能夠導電,還很薄讓無線電波可以輕易通過。若是將能夠除冰的材料噴在石墨烯奈米帶上,除冰裝置就能更輕更便宜更有效。
「當洛克西德‧馬丁公司的工程師Vladimir Volman聽到我的博士生Yu Zhu的報告,講述如何噴塗製造奈米帶薄層,他馬上就知道這是他需要的東西。因為Volman計算過只要用小於100奈米厚的石墨烯薄層,就可以因電阻加熱達到除冰效果。」
未加工的石墨烯原材有彈道電子傳導的特性(Ballistic onduction),電子幾乎不會散射,電阻很小,因此沒有辦法產生足夠的熱量融冰,但是Tour團隊從多層奈米碳管切割出來的石墨烯奈米帶(graphene nanoribbons, GNRs,)經過化學反應處理後可以產生足夠熱量融冰。當石墨烯奈米帶平均地散佈在固體表面時,各個奈米帶會互相重疊,這樣當電子在奈米帶間移動的時候,就會因電阻而產生熱量。而電流通過副產出的熱量多寡,只要調整塗層的厚度就可以調整控制。
在一開始的實驗中,Zhu和Volman所帶領的團隊,是用水溶性的石墨烯奈米帶噴塗在物體表面。「他們跟我說運作的效果很好,但是當我們一用手指摸,就會剝離沾到我們手上。」Tour表示。他在休士頓的一家汽車配件店找到了解決方法:「我買了聚胺酯汽車烤漆,因為它非常耐用,可以在黏著汽車上好幾年都不會掉。所以我們就將聚胺酯與石磨烯奈米帶結合在一起,結果既能生熱融冰,也不會輕易從物體表面剝離。」
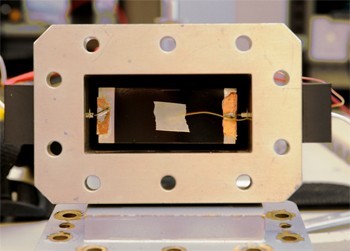
在實驗室中做出約 0.18 平方公尺的樣品,其基底是有彈性的聚亞醯胺,噴塗上聚胺酯放乾後,再用加熱板加熱軟化塗料,再用噴槍噴上石墨烯奈米帶薄層。如此一來,乾燥後的石磨烯奈米帶就會嵌入塗料,極難移除,不會再動不動就掉下來。Tour說他們的團隊也有嘗試過先噴石磨烯奈米帶再噴聚胺酯,效果也不錯。
將其製作出的只有頭髮千分之一厚的100奈米薄層接上白金電極,通以一般船艦上的電壓,在攝氏零下二十度幾分鐘內,就可以把雪融化。進一步的實驗則發現,他們新開發出的塗料,在無線電波的頻率波段近乎透明,因而能應用在雷達天線罩除冰而不會影響訊號。
Tour表示由於石墨烯奈米帶已經可以工業量產,現在實驗室的下一步則是,希望能做成幫汽車的擋風玻璃除冰。Volman補充表示他們的聚胺酯石墨烯奈米帶,有望取代目前噴在飛機上除冰的奈米管氣凝膠。
資料來源:Phys.org – News and Articles on Science and Technology
科技大觀園相關文章:






































{kind=link}