
「人類天生就超八卦!從八卦找出值得追的完美情人!」
「夫妻注定越來越像?同步的行為帶來親密感,有利集體生存!」
「焦慮是天生的!焦慮才能激發具體行動,讓你好好活下去」
「常常覺得有人在盯著你?為了躲避老虎,祖先遺傳下來的警覺本能!」
人類跟動物一樣,擁有助於繁衍的「本能」?

你大概讀過上面這樣的演化心理學報導或科普文章,就算沒有點進去,至少也看過擁有相同概念的標題,不外乎是「人有某種天性,因為這種天性有助我們的祖先生存和繁衍」。
這類論述大約在 1970 年代開始成形。當時,許多受生物學影響的研究者開始主張,人類的行為並不像人文社會學科所認為的自成一套體系,而是演化的產物,人類的行為的目的是好好在當前環境下生存和生殖,和其他動物並無不同。
威爾森(E. O. Wilson)提出「社會生物學」,認為人的行為就像鳥會飛、老鼠會打洞一樣,是透過基因遺傳,從而受到天擇演化影響。
畢竟許多生物如魚群、蜜蜂、羊群都懂得合作,這些生物也會用各種方式通訊,社會生物學由此推斷,人類行為只不過是其中一個特例。
然而,人們的行為如果都是直接被基因調控,人們又是如何「在不同的情境下輕易轉變行為」,見人說人話、見鬼說鬼話、入境隨俗呢?
許多人認為人類的的行為無法被基因直接調控,因此轉向「演化心理學」。
演化心理學:人類擁有一套演化而來的「內建程式」
在加州大學聖塔芭芭拉分校的托比(John Tooby)和科斯米德斯(Leda Cosmides)夫婦領導下,演化心理學認為:基因決定的是我們的大腦中的「認知模組」,這些認知模組可以想像成「大腦中的程式」。
當這個內建程式被輸入特定的刺激時,就會輸出特定的行為反應,有的程式負責逃避天敵、有的負責防詐騙、有的負責找食物、有的負責找伴侶……等。
演化心理學認為這些認知模組是我們祖先在遊獵採集社會中演化出來的,寫死在我們基因和腦袋中,世上每人都受制於它們。
雖然人類已經生在充滿高科技的現代社會,但我們的大腦因為「演化延遲」來不及適應,仍停留在石器時代,所以身處在現代社會時,會做出演化上不適應的行為。
舉例而言,即使香煙有害健康、保險套阻止人類繁衍,但卻因為祖先並沒有碰過香煙和保險套, 現今人類來不及演化出對這些東西的抗拒。
以前活在部落社會中,左鄰右舍都是親戚、而且食物缺乏,所以現代人會為國捐軀、嗜吃高熱量的甜食和油炸物。

演化心理學是一種適應主義(adaptationist)的觀點。適應主義認為所有的性狀背後都(曾經)有重要的適應功能,而演化心理學對於認知模組也是採取這樣的看法。
反對方:這些「內建程式」可能不是為了適應環境呀!
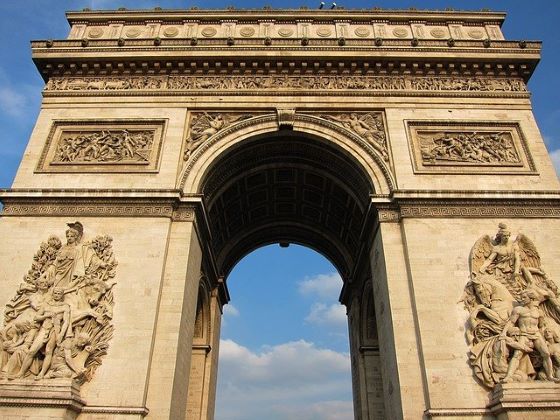
有不少演化生物學家反對適應主義,最有名的反對論點是古爾德(Steven J. Gould)和李文丁(Richard Lewontin)提出的拱肩(spandrel),也就是建築物圓拱門和垂直牆角間必須存在的那塊大致呈三角形的構造;拱肩會存在只是因為門是圓的、牆角是方的,不是因為它有重要的功能,就算建築師把拱肩裝飾得很美,這個裝飾性的功能仍不是它存在的原因。
對應到生物上的例子,人會有下巴只是因為我們直立行走,造成頭和脖子的連接角度和其他動物不同;下巴本身沒有任何演化上的適應功能。或者,我們閉上眼睛時會看到黑暗,只是因為不透明的眼皮在保護眼睛的同時會擋住光,而不是因為「看見黑暗」有利於我們適應環境。
同理,我們擁有某些認知模組可能不是因為這能適應某些環境,而是因為演化了其他特徵而發生的副作用。
大多數科學哲學家也反對演化心理學,認為演化心理學的研究方法只能瞎編出一些無法驗證的故事來解釋人的行為,或許有些解釋沒錯,但根本證明不了。
想用演化心理學解釋人類行為?反對方提出三個條件!
例如去年有篇否定演化心理學的研究,美國新罕布夏大學的 Subrena Smith 教授指出,演化心理學要能完整解釋某個行為,必須證明以下三點:
- 證明現代人的各種行為是受制於特定的認知模組而形成
- 證明這個認知模組在古代的環境下能產生某種有利生存、適應的功能
- 證明這個認知模組是透過基因遺傳自古人
第一點或許可以用心理學實驗研究,觀察現代人的行為傾向或用功能性磁振造影來推論我們有哪些認知模組。
第二點或許可以用演化模型和各種間接資訊來推論,例如從人的生理構造推論怎樣的行為較有利於生存、從考古遺跡推論古人有哪些行為能力、從其他動物的行為來推論人類如何取食或躲避天敵。
然而,第三點目前卻完全無法證明:就算現代人的行為確實源自某些認知模組、而且古人也確實在當時的環境中演化出了某個類似或完全相同的認知模組,我們仍無法證明前者遺傳自後者。
古人沒有文字,為什麼我們自帶閱讀的認知模組?
有不少證據都顯示認知模組可以習得,不見得源自基因遺傳,例如,文字大概三、四千年前才出現,但人腦中卻有專門負責閱讀的認知模組。
四千年前人類足跡早已遍及五大洲,如果閱讀的基因在四千年前才開始演化,那麼沒有文字的撒哈拉以南非洲和大洋洲的原住民應該無法閱讀,由此可知,這個認知模組應該是後天學習而得。
若人的認知模組能在現代環境下習得,那表示現代人的行為並不受制於古代的環境,演化心理學的基本假設就無法證明。
此外,還有許多人類學家也反對演化心理學,因為人類學在世界各地的研究顯示人類行為極為多元,然而演化心理學卻常常只用已開發國家的大學生當受試者,便把這些人的行為當作全人類的行為,宣稱人類「天性」如何如何,忽略人類的多元性。
這三個問題(拱肩、現代人的認知無法證明是遺傳自古人、人類行為很多元)表示用演化論來研究人類只是死路一條嗎?話別說太快。
擺脫生物學的枷鎖!如果行為不只來自「基因」呢?
社會生物學和演化心理學認為人類的行為主要都是不變的天性,是因為這兩個學科認為要能套用演化論,行為一定要能透過基因遺傳,不管是直接由基因控制行為,或是間接透過認知模組。
同時,遺傳學研究又顯示基因演化的速度很慢,人與人之間的基因大同小異,那些差異之處也很少會對應到行為差異,所以兩個學科才預期演化會造成人類的行為普世皆然。
然而,達爾文從未主張演化只能發生在基因遺傳的特徵上。
達爾文沒有讀孟德爾寄給他的論文,直到到過世前,他都不知生物的特性是如何從一代傳給下一代,也就是說,達爾文提出演化概念時,連基因、性狀遺傳的機制都還不清楚。
此外,當達爾文提出演化論時,強調的也從來就不是「不變的天性」,而是多樣性。
他在《物種原始》開頭的第一、二章開宗明義先介紹生物個體之間的可遺傳差異,然後在第三、四章說明這些差異如何影響存活、傳給下一代,於是發生天擇演化。即使在第七章特別討論生物本能從何而來時,他也斬釘截鐵地說:「我可以斷言,本能無疑存在變異」(I can only assert, that instincts certainly do vary),然後以鳥類為例,說明鳥類在遷徒、築巢和對天敵的反應方面,同一物種的本能往往會有各地差異。
文化演化認為,可能是來自「學習」的遺傳!
用演化論研究人類行為的另一嘗試是文化演化。
簡單來說,雖然人的行為或認知模組可能不是由基因決定,但仍然可以透過學習而代代相傳,並同樣受到天擇的影響。
比較適應當地的生態或社會環境的行為就容易存活並傳給下一代,不適應的就容易消失。因為「學習」成了另一種遺傳機制,文化演化避開了社會生物學和演化心理學太依賴基因的問題,也就不用預設人類有什麼不變的天性。
在同樣的環境下,人類和動物竟然出現一樣的傾向
最近有篇研究很漂亮地示範了文化演化的研究潛力。
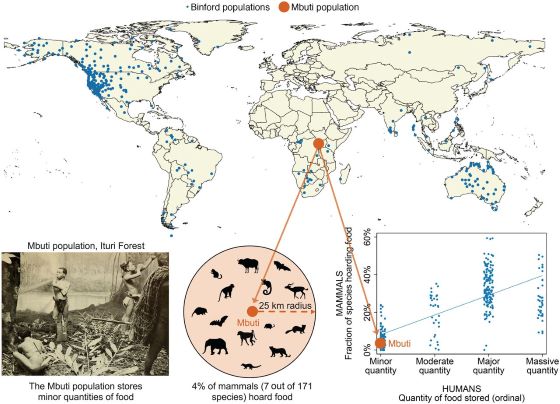
英國布里斯托大學的 Toman Barsbai 教授、德國普朗克研究院的 Dieter Lukas 研究員、以及德國波昂大學的的 Andreas Pondorfer 研究員,集結了從古至今許多研究者在世界各地 339 個遊獵採集社會做的民族誌,以及這些社會周邊 25 公里內的所有已知的哺乳動物和鳥類名錄,整理出這些人和動物在取食、生殖以及社會方面的行為予以比較,並用當地的生物群系、緯度、海拔高度、到海岸的距離等變因來描述這些人和動物是處在什麼樣的生態環境。
結果,他們發現類似生態環境中的遊獵採集社會,人們的行為常有類似的傾向,不但如此,當某地區或環境中的人類行為有特定傾向時,不管是拿這些人和25公里內的動物比較,還是和同樣生態環境中的動物比較,往往都有類似的傾向:
- 常吃魚的人類社會,同樣環境的動物也較常會吃魚
- 隨季節搬家越遠的人類社會,同樣環境的鳥類遷徙距離也越長
- 越偏一夫多妻制的人類社會,同樣環境的哺乳動物越容易會重組群體(使少數雄性有機會霸佔多數雌性),雄鳥的羽毛也越豔麗
- 外婚制(出嫁或入贅到其他部落)的人類社會,同樣環境的哺乳動物也在找交配對象時遷徙較遠,但鳥類則較近
- 允許離婚的人類社會,同樣環境的鳥類更常每年重新找對象
- 父親貢獻越多食物給家人的人類社會,同樣環境的雄性哺乳動物越傾向會照顧後代,鳥類越容易只由雄性照顧後代
- 有階級的人類社會,同樣環境的動物也越常會區分出生育者和幫手

進一步的分析又顯示,雖然前述各種人類行為特別類似 25 公里內的動物,而非 25 公里外的動物,但若是只比較相同生態環境之內的人和動物,分析人類行為是否仍比較像 25 公里內的動物時,則相似的程度會下降或消失。這顯示人類之所以會和附近的動物會有相似的行為,正是因為人類和其他動物都受到了類似的生態限制。
這表示遊獵採集的人類只是受天性趨使的禽獸嗎?非也。水鳥直接叼起獵物,人類卻會用複雜的方式製作漁網和漁籃來捕魚,這絕非本能。
這研究結果顯示的是:不論是人或禽獸,如果住在水邊卻不利用水產,就處在劣勢,較容易被演化淘汰。具體淘汰的方式仍待進一步研究。
我們可以猜測,或許小孩子比較喜歡向每天吃魚吃飽飽的大人學習,造成捕魚的行為在社會中成為主流?或是拒絕吃魚的人容易餓死或生較少小孩,造成拒絕吃魚的信念慢慢失傳?或許是不捕魚的社會在戰爭中容易被會捕魚的社會消滅或被同化?
無論細節如何,總的來說,人類的文化和動物的基因在類似的環境演化出了類似的行為。
文化演化的集大成:加上歷史與生態環境的形塑
文化人類學的傳統觀點認為人類的行為差異來自後天學習的文化,而且文化發展沒有特定的趨勢,人們的行為只能放在他們各自的文化背景中理解。
這篇研究的重要貢獻是它顯示雖然人類的行為是來自文化,但文化差異並非全都源自歷史,而是有很大部份受生態環境的天擇形塑。
此外,各文化也不是只能放在該文化中單獨理解,而是能透過文化演化的框架來找尋一套可以解釋許多不同文化的理論。
除了天擇,先前的研究顯示文化也受歷史影響。
語言較相似或距離較近的社會,就算生態環境不同,在文化上的許多特徵仍較為類似,尤其是在政治結構、宗教儀式和親族關係方面,歷史的影響往往比環境更重要。
生態環境的影響可以使用天擇演化來詮釋,而歷史的影響則可能用演化樹來分析。
演化論不是只有適應環境,另一個重要概念是地球上的每個獨立個體、族群和物種,都有共同的血統,可以表示成同一棵樹的不同分枝。這樣的概念已經廣泛應用在語言學,比較不同語言之間的關係;在考古學,也有些研究者開始用這種方式研究文物之間的關係。
人類行為能用演化論研究嗎?看來是可以的。
參考資料:
- Smith, S.E. (2020) Is evolutionary psychology possible?. Biological Theory. 15: 39-49.
- Hill, K., Boyd, R. (2021) Behavioral convergence in humans and animals. Science. 371(6526): 235-236.
- Barsbai, T., Lukas, D., Pondorfor, A. (2021) Local convergence of behavior across species. Science. 371(6526): 292-295.
- Mathew, S. Charles, P. (2015) Behavioural variation in 172 small-scale societies indicates that social learning is the main mode of human adaptation. Proceedings of the Royal Society B: Biological Sciences. 282: 20150061.








































