COVID-19(武漢肺炎、新冠肺炎)肆虐至今,帳面死亡數字已經超過 87 萬人,但是實際人數肯定更多。由 SARS-CoV-2(SARS二世冠狀病毒)引發疫情的影響太過廣泛,直接亡於瘟疫的死者之外,也有不少間接受害者,幾乎不可能精確評估實際人數。

以「額外死亡數」評估疫情影響
若想評估疫情的影響,最方便的估計方法稱作「額外死亡數(excess mortality)」,也就是比較今年瘟疫肆虐下,和過往同期的差異,看看死亡人數超過多少。每一年的死亡數會波動,所以通常是和前 5 年的平均相比。
由 30 多個國家(多數在歐洲)的資料看來,到今年 7 月底,死亡人數比預期多出約 60 萬人,同時帳面上武漢肺炎的死亡數只有 41 萬,差異將近 20 萬。
然而,額外死亡數並非全部直接來自武漢肺炎,例如沒有感染武漢肺炎,卻由於醫療系統崩潰而造成的死者,就算是被間接影響。
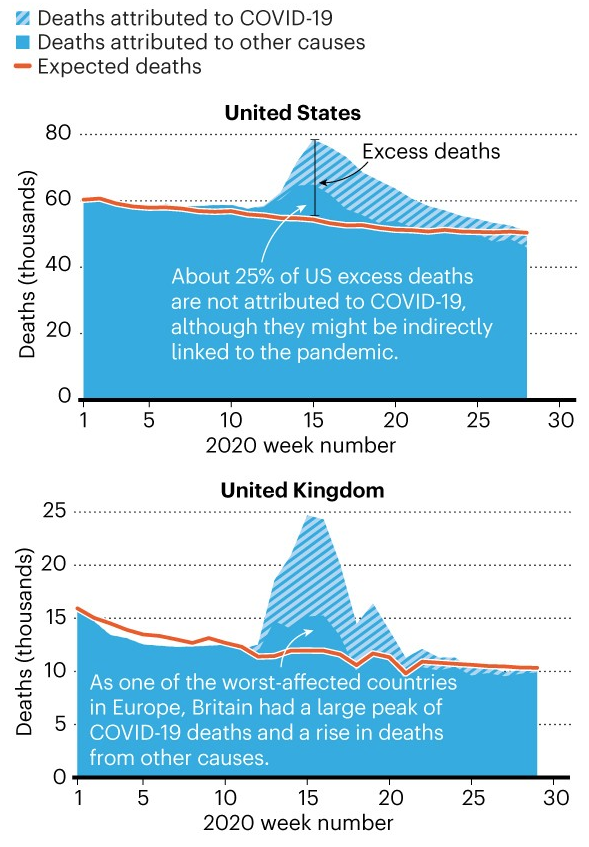
科學媒體 Nature 分析指出,額外死亡數和武漢肺炎死亡數的距離,不同國家的差別很大。美國的額外死亡數中有 25% 不是列為武漢肺炎,西班牙則是 35%。差距最大的秘魯高達 74%;可以推論,秘魯有非常多武漢肺炎死者,沒有被正式記錄。
保加利亞比較特別,額外死亡數是負的,表示瘟疫肆虐下反而比預期死掉更少的人(不過保加利亞目前的確診與死亡數,正處於指數上升的趨勢)。
南非從 3 月底嚴格防疫管制開始後,額外死亡數也一度是負的,不過 5 月底放鬆管制,後來感染人數又上升之後,額外死亡數便很快明顯增加。
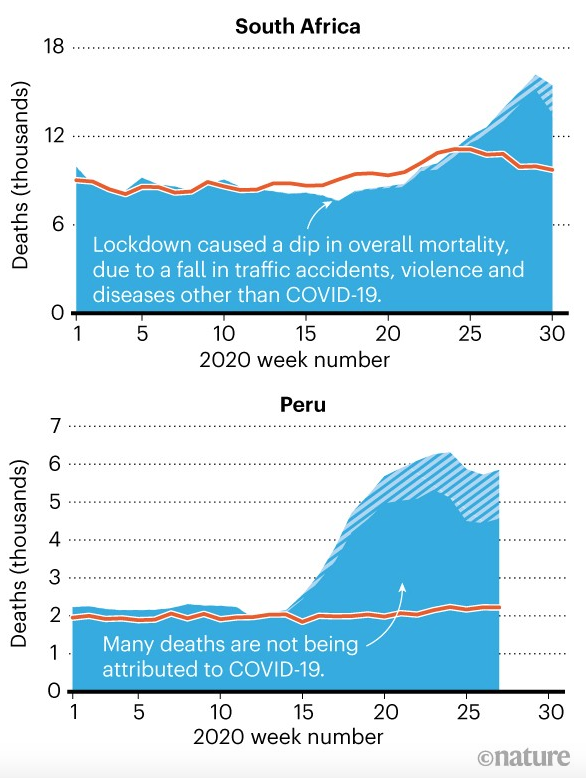
死亡人數比預期少,除了隨機波動外,是因為實施防疫措施,如減少人群接觸、停班、封城等影響,使得暴力衝突、交通事故等死亡事件減少。而阻止 SARS二世冠狀病毒傳播的行為,也會阻止某些疾病傳播,特別是流感。死於流感等疾病的人數變少,也會減少死亡數。
也就是說,人為介入防疫之後,原本的預計死亡人數會減低一些;因此 SARS二世冠狀病毒實際上的負面影響,應該要比額外死亡數再高一些。
疫情影響太大,死亡數字難以釐清
死亡數的詳情相當難以釐清,西班牙流感(照現在流行可以稱為 1918 年新型流感)已經過去一百多年,但是仍然不太清楚詳細的死亡數據。
儘管武漢肺炎的疫情就在眼前上演,專家依然沒有把握能精確釐清各種死亡人數。全世界每年粗估只有 50% 的死亡有明確記錄,另外 50% 缺乏存在感,就跟沒有發生過一般,尤其是在中、低收入國家。
想要估計額外死亡數,必需掌握充足的資料,這樣的國家卻不多。人口統計不發達的國家,原本有多少活人、死人就不太清楚,還要計算瘟疫下額外死掉多少人,實在是強人所難。由於各種原因沒有被記錄到的死者,即使可以透過事後調查得知,也將是一段時間以後的過時資訊。
對於瘟疫期間去世的人,一些專家希望精確釐清各種不同的死因,深入認識 SARS二世冠狀病毒在各個層面造成的直接與間接影響。卻也有些專家認為分那麼細沒什麼意義,因為不論直接或間接,這些額外死亡數皆與武漢肺炎有關。
還有些專家提醒各位,目前疫情還在持續,感染與死亡數仍然持續增加,一些估計其實不用急於一時。
根據已知資訊判斷,感染 SARS二世冠狀病毒以後的死亡率並不是太高,介於 0.5 到 1% 之間。不過由於感染人數眾多,對全人類或各大地區的影響,仍然算是非常廣泛。
本文轉載自新公民議會〈武漢肺炎究竟殺死多少人?〉
延伸閱讀
- COVID-19 有多致命?認識3種死亡率
- 黑死病、西班牙流感到 COVID-19,瘟疫如何重塑社會貧富?
- 瘟疫的長久烙印──回顧100年前西班牙流感蔓延時的台灣
- 為什麼台灣在某一天,不可能有640位無症狀感染者?
參考資料
- How many people has the coronavirus killed?
- Excess mortality from the Coronavirus pandemic (COVID-19)
本文亦刊載於作者部落格《盲眼的尼安德塔石匠》暨其 facebook 同名專頁。