由生物去世已久的遺骸取得大量 DNA,拼湊出古代基因組進行研究,是近年一大科學突破。
台灣所屬的東亞,最近有數項這類「古代DNA」的論文發表,其中也包含來自台灣遺址的樣本。一系列研究以遺傳學視角認識東亞歷史上的人群遷徙、混血之外,對於漢人、通古斯語族、南島語族的源流,也提供了重要的指引。
新石器時代的東亞,南北遺傳差異明顯
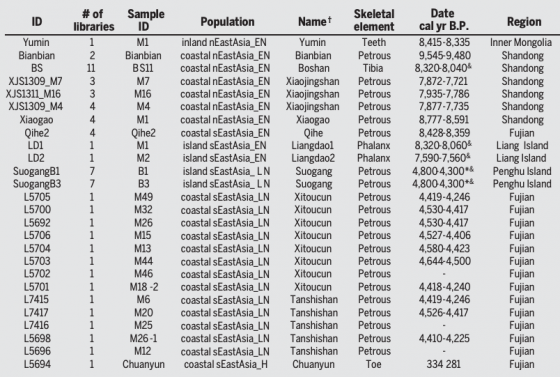
其中一項研究,由東亞的北方與南方取樣 24 個古代基因組,除了一個樣本距今 300 多年以外,其餘年代都介於 4000 到 9500 年前之間,全都算是新石器時代,或是差不多正在轉型為新石器時代。1
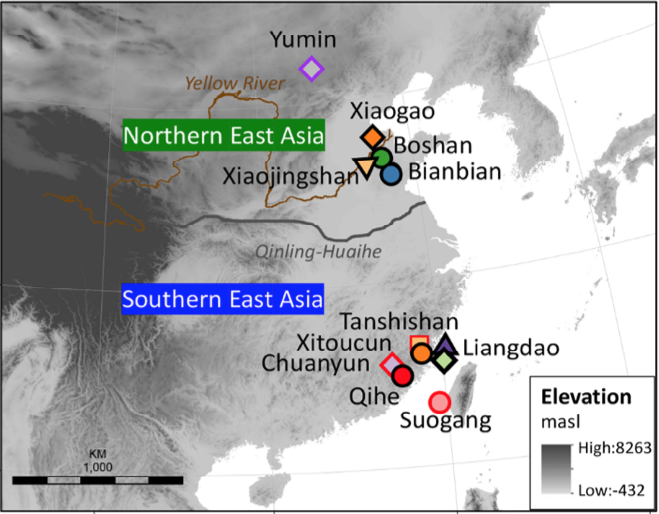
值得一提的是這項研究中,台灣也貢獻了 4 人,都位於台灣海峽的小島。住在馬祖旁邊的亮島人(Liangdao)一號距今 8000 多年,二號距今約 7500 年;以及將近 5000 年前的 2 個樣本,來自澎湖的鎖港遺址(Suogang)。
其他樣本地理上可分為兩大群,8 個樣本位於東亞大陸北方的內蒙古、山東,距今 7000 到 9500 年前,屬於新石器時代早期。另一群 11 個樣本位於東亞大陸南方的福建,最早 1 個距今約 8400 年前;10 個年代比鎖港遺址稍晚,算是新石器時代晚期。

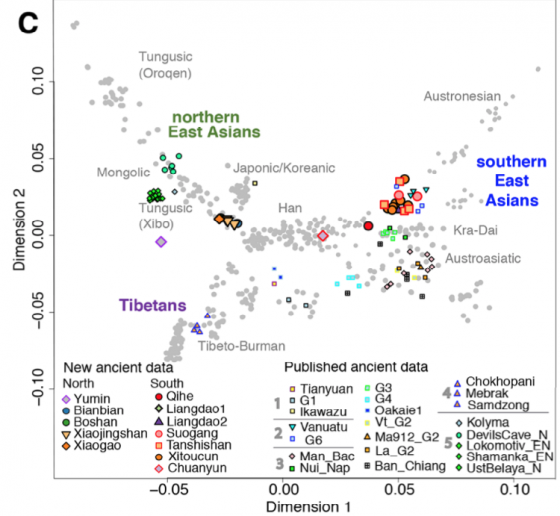
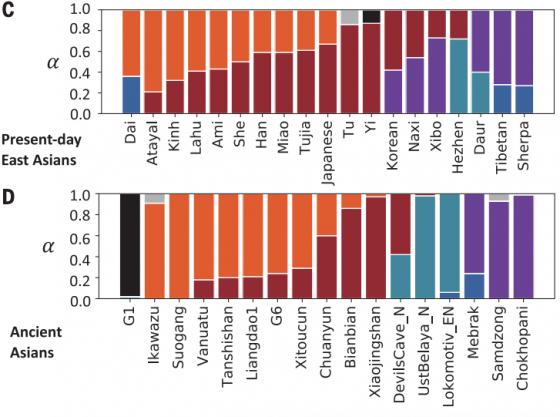
和已知的現代、古代基因組比較,東亞整體上可以區分出南方、北方兩大古老祖源(ancestry)。這回發表的新石器時代基因組,各自屬於南方與北方,而且彼此遺傳上的差異相當明顯。
加入現代族群一同比較,東亞南北兩大祖源的分佈和地理密切相關。偏向南方祖源的現代族群,包括位於中國西南部和東南亞的南亞(Austroasiatic)、壯侗(Kra-Dai)、南島(Austronesian)語族。
偏向北方祖源的族群,則有韓國人、日本人、蒙古人、通古斯(Tungusic)語族,另外圖博人(西藏,Tibetans)也算是北方那群,不過差異稍大。至於現代定義的「漢人(Han)」,則介於這一大群人之間。
新石器時代以後,東亞南北的遺傳交流
過去幾年古代DNA 研究發現,世界許多地方的族群,較早的時候各地遺傳差異比較大,後來隨著移民、遷徙、混血、遺傳交流,使得不同地點間的差異減少,令大家在遺傳上變得更加相似。而這回分析指出,東亞也不例外。
比較新石器時代與現代,身處同一地點的人,可以發現東亞北方、南方的現代人,彼此的遺傳差異比新石器時代小得多。意謂新石器時代以後,東亞南北之間發生明顯的遺傳交流,使得如今南方人在遺傳上,更接近新石器時代的北方人,反之亦然。
遺傳交流應該是雙向的,也就是新石器時代的南部祖源進入北方,北部祖源也流向南方。估計現代東亞北部族群有 21 到 55% 祖源來自南方;中國南邊的省,漢人則有 36 到 41% 祖源來自北方。
另一項尚未正式發表的研究,報告 191 個取自東亞各地的古代基因組,分析所得的結果除了祖源比例稍有不同以外,結論與上述研究十分類似。2
解釋東亞人類起源的「二層假說」,不受遺傳證據支持
有一派考古學家以「二層假說(Two-Layer Hypothesis)」解釋東亞人群的起源。簡單來說,此一假說主張東亞人可分為兩層,第一層是數萬年前比較早的移民,持續依賴採集、狩獵維生,例如東南亞的和平文化(Hoabinhian);第二層則是發展出農業,新石器時代以後的新移民。3
二層假說的證據主要來自人骨型態,由型態差異區分第一層或第二層人。二層假說若是正確,由於兩層人分家上萬年之久,彼此間的 DNA 差異應該非常明顯。
以頭骨型態區分,亮島人一號和福建 8400 年前的奇和洞人(Qihe)都被歸為第一層人;可是他們的 DNA 和東亞南方被歸為第二層的人(例如亮島人二號),看起來沒有太大差異。東亞南部所謂的第一層人,與東南亞年代類似的和平文化人,遺傳上可謂截然不同。
由此看來,二層假說中的第一層人,定義上並不成立。第二層人或許仍有些許參考價值,但是東亞與東南亞新石器時代後的移民不只一波,光是籠統的第二層人,恐怕不足以解釋複雜的狀況。
- 延伸閱讀:解釋東亞人類的形成,二層假說?
南島語族—傳承新石器時代南方祖源至今
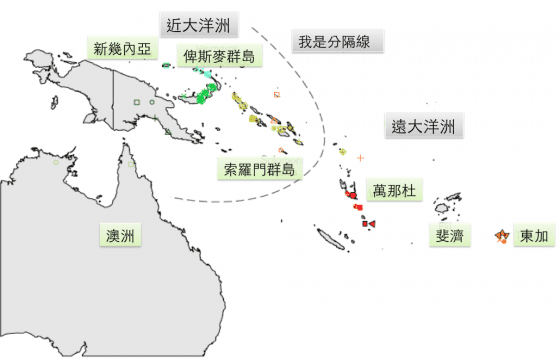
這回另一意義重大,不過不太意外的發現是,新石器時代的福建、亮島、澎湖樣本,遺傳上皆與約 3000 年前,位於萬那杜的拉匹達文化人非常相似(不過沒有到完全一樣)。
萬那杜位於澳洲更東方的海域,島上出土的拉匹達文化(Lapita),被視為是最早移民遠大洋洲(Remote Oceania)的南島族群。
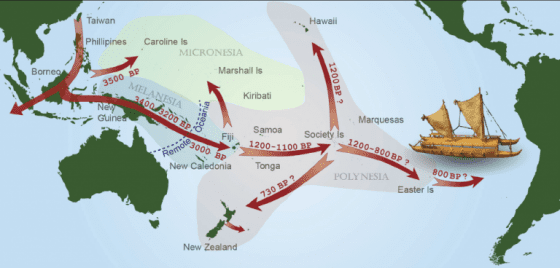
綜合地理、年代、遺傳資訊,可以重建南島族群的旅程:由新石器時代的東亞大陸南方,先移民台灣,再一路遷徙前進太平洋。
根據現有資訊判斷,東亞至少到新石器時代結束以前,南部與北部的居民遺傳上仍有明顯差異(不過至今取樣都限於很南與很北,地理中間的或許也會相對介於其間)。東亞南方在這個時期的居民,分別向更南邊的東南亞,還有海外仙島移民。
超過 5000 年前抵達台灣的移民,帶來當時東亞南方的祖源。他們在台灣後來發展為南島族群,一段時間後又繼續前進太平洋和印度洋;但是至此之後好幾千年,台灣和東亞大陸間缺乏直接的遺傳交流。
新石器時代東亞南方的祖源,除了被移民帶到台灣以外,也被帶往另一個方向的東南亞。抵達東南亞的移民,後來與當地更早的居民合體;隨後又與來自北方,更晚的移民有過較多遺傳交流。他們後來發展為南亞、壯侗語族。
所有族群中,壯侗語族與台灣的南島語族在遺傳上相似度最高;他們的淵源,或許能追溯到新石器時代的長江流域。4, 5
- 延伸閱讀:和平文化,繩文人,東南亞古代DNA,不斷南向的人們
- 延伸閱讀:古代東南亞南向的DNA、語言、農業
至於東亞大陸,現在屬於中華人民共和國領土的地區,在新石器時代結束後,則是出現由南向北,以及由北向南的情慾流動,使得東亞大陸的南北之間在遺傳上更加接近。因此,能追溯到新石器時代南方祖源的海外南島族群,和後來又加入北方 DNA 的東亞大陸南方族群,遺傳差異變得更大。
台灣南島語族從古至今的延續性
另一項尚未正式發表的研究,有 52 個古代基因組取自台灣,分別來自台灣東北部的漢本遺址(Blihun Hanben),以及綠島的公館遺址(Gongguan)。
漢本遺址有早晚兩個年代,距今各 3300 年和 1600 年左右;公館遺址大概介於 1300 到 1700 多年前。他們算是新石器時代晚期,到鐵器時代早期的台灣人。(台灣已知最早的鐵器約在 2400 年前出現,位於台東的舊香蘭遺址6)
和其他地方的古今族群相比,這群台灣古代人彼此在遺傳上最為相似,與現代台灣原住民的差異也很小,反映出台灣南島語族從古至今的延續性。
另一方面,台灣之外南島語族的祖先,大概在 4000 多年前離開台灣;他們深入太平洋的後裔拉匹達人,和較早的漢本人年代接近,大洋洲與台灣兩處地理距離遙遠,DNA 卻十分相似,顯示他們有著共同的遺傳源頭。
探討東亞的古代遺傳學除了上述兩項研究,最近還有第三篇論文問世,著重於東亞北部三條大河:黃河、西遼河、黑龍江流域的遺傳歷史。7
延伸閱讀
- 除了左鎮人,還有哪些古代人們在台灣生活過?
- 繩文人真是現代日本人的祖先?有多少遺傳留下?──繩文人DNA研究(上)
- 日本的繩文人從哪裡來?和台灣原住民又有什麼淵源?──繩文人DNA研究(下)
- 熟悉的澎湖,最對味──鎖港遺址
- 台東都蘭,南島語族從台灣出海前的最後一站
- 航向太平洋的DNA之旅:南島語族與拉匹達關係解密
- 航向太平洋的DNA之旅:人口劇烈轉換卻仍說著南島語?拉匹達以後的南島語族
參考資料
- Yang, M. A., Fan, X., Sun, B., Chen, C., Lang, J., Ko, Y. C., … & Wu, X. (2020). Ancient DNA indicates human population shifts and admixture in northern and southern China. Science.
- The Genomic Formation of Human Populations in East Asia
- Matsumura, H., Hung, H. C., Higham, C., Zhang, C., Yamagata, M., Nguyen, L. C., … & He, J. N. (2019). Craniometrics reveal “two layers” of prehistoric human dispersal in eastern Eurasia. Scientific reports, 9(1), 1-12.
- McColl, H., Racimo, F., Vinner, L., Demeter, F., Gakuhari, T., Moreno-Mayar, J. V., … & Wasef, S. (2018). The prehistoric peopling of Southeast Asia. Science, 361(6397), 88-92.
- Lipson, M., Cheronet, O., Mallick, S., Rohland, N., Oxenham, M., Pietrusewsky, M., … & Domett, K. (2018). Ancient genomes document multiple waves of migration in Southeast Asian prehistory. Science, 361(6397), 92-95.
- Hung, H. C., & Chao, C. Y. (2016). Taiwan’s early metal age and Southeast Asian trading systems. Antiquity, 90(354), 1537-1551.
- Ning, C., Li, T., Wang, K., Zhang, F., Li, T., Wu, X., … & Dong, G. (2020). Ancient genomes from northern China suggest links between subsistence changes and human migration. Nature Communications, 11(1), 1-9.
本文亦刊載於作者部落格《盲眼的尼安德塔石匠》暨其 facebook 同名專頁。