


- 文/仰望天空的智人│目前為高三自學生,在升上高三的那個暑假,毅然決然走上自學的道路。希望在有限的青春,不要只是僅追求紙上的對錯,而是時時刻刻的詢問世界,「為什麼?」。
上物理課教到克卜勒(Johannes Kepler)的三大定律時,老師特別也介紹了對克卜勒的定律有很大貢獻的 第谷.布拉赫(Tycho Brahe)。
第谷是一位丹麥的貴族,鼻子因為決鬥而失去了一部分,擁有當時資料最多、最精準的天文台。他的助手約翰尼斯.克卜勒(Johannes Kepler)之後會靠著這些資料,成功地發現橢圓行星軌道。可惜第谷去世的早,無緣見證到克卜勒的曠世巨著《新天文學》的出版。
課堂投影片上,老師放了一張畫作,其中第谷用右手指著牆上的小洞。我心中很快地列出了某些想像,認為第谷是一位腦袋內建「量角器」、每天有閒情逸致仰望天空的貴族。
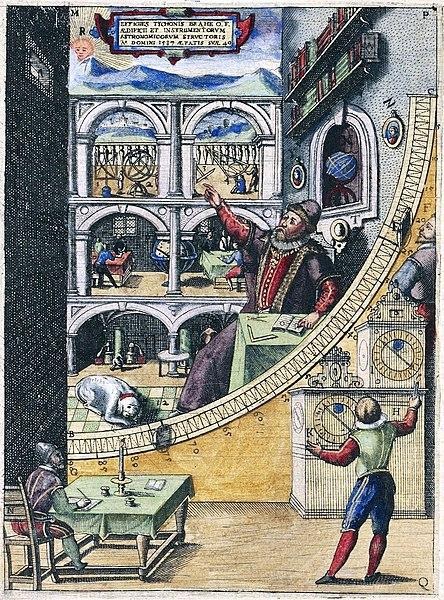
等到我有了機會研究更多有關第谷的資料時,才赫然發現,當初看到的畫作,就已經揭露了第谷在烏蘭尼堡(Uraniborg)的多種精密觀星儀器。
一幅畫帶你認識第谷如何觀星
介紹第谷時,無法忽視這張雕刻畫,裡面有著他一生的研究心血。它出自於第谷在西元 1598 年出版《Astronomiae Instauratae Mechanica》(中譯:新天文學儀器)中的雕刻畫,畫裡清楚地繪畫出第谷的儀器,並隱含了他的觀星技術。
回到稍早的西元 1597 年,第谷因為和新繼位的丹麥國王克里斯蒂安四世(Christian IV)長期的爭執無法解決,最終被迫離開了哥本哈根。第谷帶著儀器,暫時借住到貴族朋友海因里希.蘭卓(Heinrich Rantzau) 的城堡。
在流亡的這一年中,他完成了此書,希望藉此讓國王了解他的貢獻以及放棄他的損失。但丹麥國王並不領情,最後第谷將此書獻給了神聖羅馬帝國魯道夫二世(Rudolf II),並很快地獲得了賞識,第谷因此得以設立新的天文台,進而邀請克卜勒加入。後來沿用多個世紀、精準的「魯道夫星表」(Tabulae Rudolphinae)也是由此為開端建立的。
第谷如何獲得魯道夫二世的青睞?他的書中又提到了哪些觀星的技術呢?我們可以從雕刻畫裡的內容談起。
畫中透露了第谷擁有三種主要的觀星儀器分別為:四分儀(Quadrant)、六分儀(Sextant)、渾天儀(Armillary)。每一種儀器都有各自特殊的用處。
四分儀:建立天體的絕對座標
四分儀,顧名思義,儀器角度為全圓周的四分之一,即 90 度。90度是地平線到天頂的範圍,方便直接從地平線開始量測,是所有天體量測的基準。第谷以四分儀建立精準的天體座標。

在畫作中,佔據最大版面的壁畫四分儀(Mural Quadrant),就是第谷在烏蘭尼堡的主力觀察儀器,長期固定面對著子午線,進行天體座標的測量與修正,半徑 1.94 公尺的龐大身軀上刻滿了細緻的刻度。需要三個人協作,一人看緯度,一人看時間,一人指揮,才能夠完成觀測。此儀器精度可達 10 角秒,遠遠超越人類的裸眼極限。
除了定點觀測外,第谷也設計了另一個室外四分儀,用來觀察太陽相對繞行的位置。此儀器擁有和壁畫四分儀一樣半徑(1.94公尺)的方形設計,它能旋轉到任意方位。特別的是第谷選用鐵材來製作方形四分儀,堪稱所有儀器中的傑作,堅固、輕巧、可移動、同時又兼具驚人的 10 角秒精準度。

六分儀:量測天體間的角度差

六分儀,儀器角度為全圓周的六分之一,即 60 度。特別的是它並不是測量物體水平或垂直角度,而是測量物體在天空中的角度差。可以再透過幾何運算與其他測量資訊,來獲得相對天體座標。
第谷設計六分儀時,利用 60 度結構與等腰三角形的特性,簡化了許多繁複的幾何運算,並透過經年累月的重複量測,讓這身長 1.55 公尺的龐大儀器精度仍可達 24 角秒。
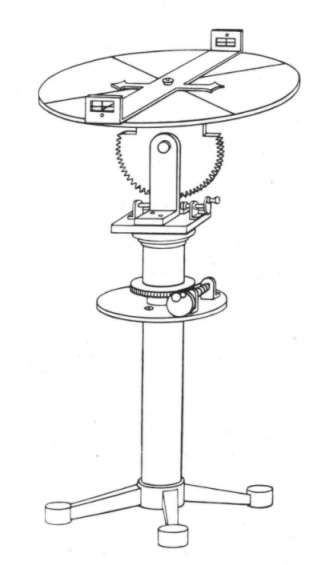
渾天儀:協助進行座標轉換

渾天儀,為一個大型的活動圓形儀器,內部由多個圓環組成天球外框,能夠同時決定黃道面、天球赤道面、子午線以及天極。主要會有兩個環一個代表黃道,一個代表天球赤道,也象徵著自轉和公轉,再加上其他輔助環代表行星、垂直面等等。
在當時因為沒有電腦,因此有兩者的微調需要經過複雜的幾何運算,為了簡化問題,才有了這類型的儀器。渾天儀較為類似輔助儀器,方便占星學家做座標轉換,不像是四分儀或六分儀為直接觀測儀器。
第谷在此儀器上的創新在於,當時的天文學家都是以黃道面當作他們的天體基準面;但第谷認為,從天極得到的緯度要轉換到天球赤道坐標系相當不便,於是他將基準面設定為天球赤道面。如此可以透過模擬地球自轉來簡化觀測儀器的操作,直接同時量測出天體的赤經與赤緯,也因為這樣的設計,讓後人認為第谷是發明望遠鏡赤道儀的天文學家。
渾天儀全部圓環皆以鐵材製作,龐大沉重的結構能夠在天極軸上精準又平衡地旋轉,在當時的製作工藝是相當大的挑戰,第谷設計了獨一無二的軸承,解決了天極軸旋轉的問題。因此,此觀星巨獸直徑達 1.55 公尺,但觀測精度卻可達 1 角分。

天文儀器的改良:刻度小還要再更小
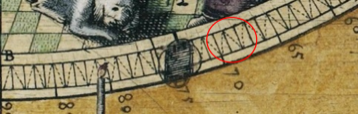
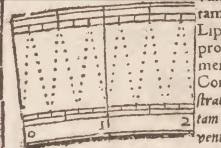
第谷嘗試了多種特殊創新的刻度劃分,包括設計了游標卡尺的前身「Nonius」,但他最終選擇了「橫向刻度」(Transversal Scale)作為每個儀器的標準刻度劃分。
除了圓周刻度劃分外,第谷在圓周兩側的刻度間交錯畫上斜線,並刻上橫向刻度,他巧妙的運用截線定理,讓刻度劃分並不再侷限於圓周上,更能夠藉由儀器的圓周寬度來增加刻度劃分。
舉例來說,第谷的壁畫四分儀,半徑 194 公分,一度的圓周長約有 3.4 公分,劃分成六格,每格長約 0.5 公分,代表 10 角分。0.5 公分的圓周已經無法再劃分到更小,橫向刻度就能夠派上用場了,第谷將四分儀的圓周寬度設計約 13 公分,因此兩側 10 分角刻度間隔的對角線約為 13 公分,再細分 10 格,使得刻度來到 1 角分。
此時每角分間隔 1.3 公分,此間隔足夠讓第谷再劃分 6 格,使得刻度來到 10 角秒,每 10 秒角間隔 0.2 公分,裸眼可以輕鬆識別此間隔,達到裸眼 10 角秒的觀測精度。
排除觀測者造成的誤差
從累積多年觀測經驗中,第谷體悟到:如果觀察者無法精準的觀測星體,再精準的儀器也是徒勞。
當時人們靠著「針孔」來對準目標物,他很快地發現,觀察者無法每次都用單眼將目標物的中心對準在孔洞裡,因此造成了 8 角分的誤差,這對於擁有精度 1 角分儀器的第谷來說,實在是太過荒謬了。
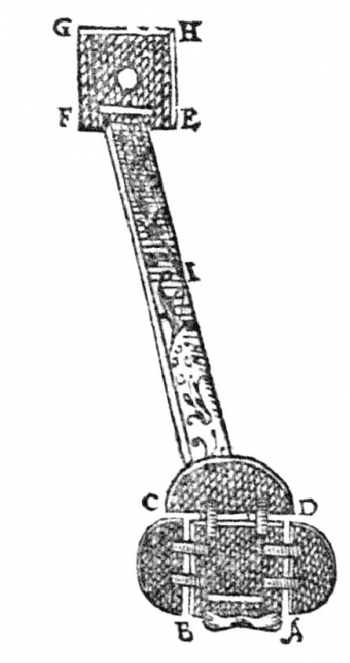
因此他發明了「無視差瞄準器」(Parallax-free Sight),讓觀察者用雙眼通過兩側隙縫,觀察目標物通過前方的圓柱孔,當物體都在左右眼的隙縫裡,這就是完美對準。
不只是嶄新的天文儀器,讓觀測不再受人眼所限
普遍人類裸眼最多只能看到 1 角分,第谷當時最好的四分儀就已經能夠看到 10 角秒的精度了,持續領先當時眾多天文學家 100 年,直到 1660 年代開始發展天文望遠鏡。
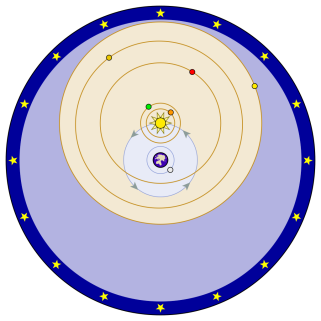
第谷是一位相信客觀中立的科學家,嘗試用他超精密的觀星儀器,來探索困擾當時天文學家的誤差。他深信著精準資料給予的結果,而建立了介於地心與日心之間的「第谷模型」,讓克卜勒在這基礎上,更進一步建立了完整的行星軌跡模型。他並且推論,如果地球繞行太陽的話,應該能夠觀察到星星的視差,殊不知星星與地球的距離超乎了當時人類的想像,視差小於 1 角秒,這超過人類肉眼的極限。
但一切都無妨,在第谷之後的 200 年,人類首次測量到天鵝座 61, 313.6 毫角秒的視差。距離地球 10 光年,星星不再是天空中遙不可及的光點,人類會繼續一步一步的了解天空的每個角落。
參考資料
- Chapman,A.,1989,Tycho Brahe – Instrument designer, observer and mechanician,J. Br. Astron. Assoc,99(2),70-77
- Tycho Brahe,1598, Astronomiae Instauratae Mechanica





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}