採訪/謝瑩霖‧協助取材/美商國家儀器股份有限公司
採訪/謝瑩霖‧協助取材/美商國家儀器股份有限公司
由臺灣大學BioRoLa實驗室製作的輪足複合機器人(Quattroped)與六足仿生機器人(miniRHex),以獨特的運動方式來適應各種地形,提供了不同於以往的觀點,讓大家對機器人有更多樣化的想像。本篇將為各位更詳細的介紹這兩臺頗具特色的機器人。
(左圖為臺大機械所林沛群老師。)
【以「仿生機器人」為主軸,取材自生物步態】
由臺灣大學機械所林沛群老師所帶領的仿生機器人實驗室(BioRoLa),主要研究領域是以「仿生機器人」為主軸,研究機器人足部運動系統。其中最主要的兩臺機器人為六足仿生機器人(miniRHex)與輪足複合機器人(Quattroped),皆是以特殊的足部結構為特色的機器人。
林沛群老師說:「輪跟足之間有很大的差異,人在發展環境的過程中,若要使用輪必定要先將路剷平,所以輪是人創造出來的;但如果是生物體在自然且未開發的環境裡,經過時間的証實,演化出來最好用的還是足,這也是為什麼生物體幾乎是使用足來行走。而在日本機器人發展主要以人形為主,反倒是在美國機器人研究主要是輪型,而我是將研究的重點放在足部的運動。」
而輪足複合機器人(Quattroped)與六足仿生機器人(miniRHex)最主要的取材對象是「生物的步態」,林沛群老師根據生物在自然界中行走的模式與方法,製作出「仿生」機器人。以下將分別為大家介紹這兩臺機器人的獨特之處。
六足仿生機器人(miniRHex)
六足仿生機器人藉由其多種步態來行走,可行走於崎嶇不平的路面、跨越障礙、爬上樓梯及斜坡。這臺六足機器人的行走模式是參考在日常生活中,人們總是對敬而遠之的生物──蟑螂。林老師說:「我在美國時,與一位柏克萊UC-Berkeley專門研究蟑螂運動的教授Prof. Robert Full討論時發現,蟑螂看起來簡單,但實際上卻有很大的學問。牠們只須透過足部簡單的交互運動,就能前進以及越過障礙,這其中必定有值得我們學習的部分。」
目前機器人的步態包含前進及後退,在速度上又可分為一般行走、慢跑及高速奔跑,但更特別的是不需足部翻轉的蹬跳前進。而攀爬方面已可克服斜坡及樓梯,另外較為有趣的步態是利用機腹平坦部分來滑下樓梯,以及兩組足部反向運動的原地旋轉和足部瞬間出力的跳躍,現今林老師仍在努力於步態的開發,以提升機器人對於各種環境的適應性。
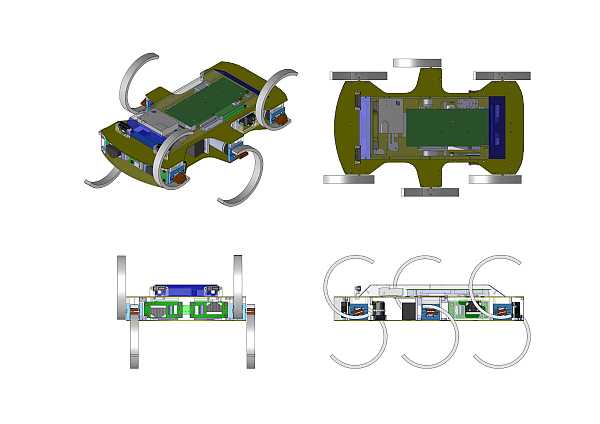 ▲六足仿生機器人工程三視圖。
▲六足仿生機器人工程三視圖。
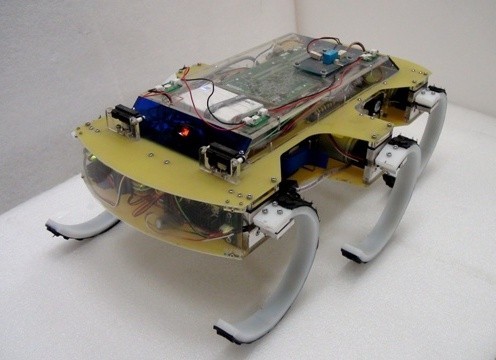 ▲六足仿生機器人。
▲六足仿生機器人。
輪足複合機器人(Quattroped)
林沛群老師實驗室的另一臺機器人──輪足複合機器人(Quattroped)是一臺不論在室內或室外都可自由運行的機器人,這臺複合式機器人的輪和足使用同一組動力來源,藉由「轉換機構」可將輪足切換成足部或是輪型兩種不同的移動模式。相對於前面提到的六足仿生機器人,可輪足變換的好處在於,平面時以輪的方式來移動,較為省力也可提升速度。
但由於輪、足兩者運動模式所需的軸心不同,於是必須透過「轉換機構」來切換軸心點。以輪移動模式時,輪圈與地面相接觸的點則落在軸心點的正下方固定距離處;但在足部移動模式中,由於足部運動一般為週期性的向前擺動,軸心點與地面相接觸點並未依循特定的規則,所以在足部的週期運動中,足部對地面的相對位置會呈現頻繁但不固定的變化。
基於上述的原因,林老師與學生們設計了一個新式的轉換機構,此機構可以直接控制輪圈的外形以及輪心與關節的相對位置。由於輪圈本身是二維平面物體,為使輪模式能直接延伸轉換成足模式,最直接的方式就是在原本的旋轉自由度之外,再增加一個自由度,這個自由度可調整關節連接點和輪心在垂直方向上的相對位置,並在機體傾斜時可發揮校正的功能。由於這兩個自由度互相垂直,並不會產生干擾的問題。如此一來就能藉由切換的方式來產生「輪」和「足」兩種移動模式。
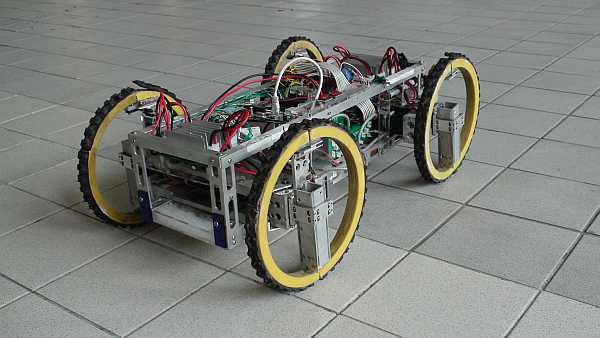 ▲複合機器人輪的狀態。
▲複合機器人輪的狀態。
這兩臺機器人在設計架構上非常相似,皆採用彎曲的足部以及扁平的機體,機身內部皆設置慣性量測系統,內含加速規及陀螺儀,行進時六足機器人,六個足部以三足為一組,分成兩組交替行走,在機構的控制上非常簡單,每一隻足由一顆馬達提供一個由後向前翻轉的自由度,利用最少的馬達數量來控制機器人。而在輪足機器人方面,則採用一隻足兩顆馬達,用意在於提高足部自由度。另外由於四足平衡不易,在崎嶇地時可採用三足不動一足動的方式前進,以保持機身平衡,除輪移動模式外,輪足機器人其餘行走時皆採由後往前翻轉的自由度。
【使用的軟體以及硬體】
仿生機器人實驗室的六足機器人所運用的硬體系統為Single board RIO,而輪足機器人則採用CombactRIO,兩者皆架構簡單、穩定、可長時間使用且可模組化,非常適合學術界進行各式原型機開發測試,因為大小、重量、效能以及學習時間均是重要的因素。
而機器人要能夠動作,只有硬體結構是不行的。在研發這兩臺仿生機器人時,除了運用CompactRIO及Single board RIO系統,在軟體上便使用圖形化介面的LabVIEW。
至於為什麼選擇使用LabVIEW而非C語言為撰寫程式語言的軟體,林老師表示:「在國外我們大多使用的C語言來寫程式,運用工業電腦的架構來將一塊塊不同功能的電路板互相堆疊,造出一臺機器人,由於國外的機器人通常是整合電機、資工、機械三方共同研發,程式部分可交由熟悉C語言的資工系學生來寫。使用C語言有利也有弊,缺點就是程式量過大,可能一個機器人程式碼會多達幾百萬行;但不可否認的,使用C語言可使CPU使用量較低,讓機器人做出更多的行為動作。」
LabVIEW和CompactRIO與Single board RIO皆有良好的整合性,讓使用者在系統整合上能節省下大量時間與精力。在林沛群老師的仿生機器人實驗室裡,所有學生幾乎都是機械工程背景,對他們而言,採用可快速建立原型、穩定、容易上手、具良好整合性的機電系統,為機器人開發的關鍵因素。
林老師也說道:「經過審慎的評估後,LabVIEW和CompactRIO與Single boardRIO恰好符合我們的需求。由於研究所學生兩年就換一批,而LabVIEW 圖形化的程式介面,可使學生快速的學會如何撰寫程式,也較容易理解先前開發者所撰寫的程式,方便學生們進行交接。」但說到底,機器人是具備高複雜度的系統,要成功開發一臺可適切運作的機器人,仍需要整合機械、電子、和資訊等不同領域,並投入大量的時間和精力,才能順利完成。
 ▲六足整體系統架構圖。
▲六足整體系統架構圖。
【未來目標】
這兩臺機器人在目前已經在重新組裝做更新,林老師透露,他希望六足的仿生機器人在未來可以跳躍並飛越兩個身長以上的距離。要做出這樣的行為,必須使機器人能夠瞬間出力,目前元件已經是使用在市面上可取得最合適的零件,但仍然無法做出期望達到的動作,因此還需要再想其他的方法來完成目標。
跳躍的步態比較特別,不像之前行走及翻越障礙物是從研究蟑螂所得來的,跳躍這部分林老師改為探討馬在跨欄時的步態,必須先將六隻足部經由數學軟體計算過後,再由電腦各自分開控制,與先前行走步態時分成兩組來控制有所不同。
而在輪足複合機器人部分,一個地形中可能同時含有崎嶇地與平地,於是當機器人遇到崎嶇地形時,就會切換為足移動模式,但遇到平地又想切換成省能的輪移動模式時,都必須停下來在原地進行長時間的切換,但如此一來耗費的時間自然就增加,而且原本流暢的移動就須強迫暫停。所以林老師希望「深入研究如何在移動的過程中進行輪足的變換」。期望未來可以像變型金剛一樣,一邊移動一邊變換形態,充分展現出大家對於未來機器人的期望及獨創性。
截至目前為止,林老師的實驗室主要研究機器人的運動方式,未來可能朝向探測機器人或機器人載具來研究。現在需要機器人去探測的是還未開發(或仍在開發中)的地方,因此需要讓機器人學會更多的步態去適應。「目前臺灣的生物學者大部分都是研究生物的繁衍,較少研究步態」,林老師希望未來能跟動物學者一起整合進來參與這樣開發研究。
文章原文刊載於《ROBOCON》國際中文版 2013/3月號
























-1020x601.jpg)