


十一月專題【食慾之秋】天冷了,來點好吃的吧!
嘿嘿嘿,最近季節也漸漸邁入秋天,畢竟是果實豐收的季節,所以總是讓人聯想到一大堆好吃的東西,對吧!
不過今天介紹的其實不是像大閘蟹或秋刀魚的海鮮,是口感綿密鬆甜,又暖呼呼的,號稱「千果之王」的——栗子!

栗子背景小檔案
大家平常看到的栗子,不外乎就是小攤販賣的一顆一顆的糖炒栗子,或是超市中盒裝販賣的栗子,不太有機會看見栗子經過處理前到底長什麼樣子。
我們平常說的栗子,其實來自於一種叫做「板栗」(Castanea mollissima) 的植物。有些人可能會認為我們平常看見那一顆一顆的栗子,就直接長在樹上,實際上,採收前長在樹上的板栗果實,長得跟我們日常生活中所看見的「栗子」可是大不相同喔!

你可能會想,這個長的跟海膽有點像的東西到底是什麼構造?是果皮嗎?所以栗子到底又是什麼構造?
其實,板栗是「殼斗科」的植物,而殼斗科顧名思義就是「有殼」,對吧!那一層看起來有好多好多刺的外殼,其實就是它的殼斗喔!
有些人可能會對殼斗這個名詞非常陌生,但其實殼斗科的植物大家一定不陌生,比如說,冰原歷險記中,那顆劍齒松鼠不斷想要拿到手的橡實,就是殼斗科的果實喔!

大家應該都有學過,有些植物會長出特化的葉子,而我們將這種特化的葉子稱為「苞片」。有些植物的苞片長得又大又鮮豔,其中,最經典的例子就是聖誕紅!聖誕紅鮮紅的苞片能夠吸引昆蟲來接近真正的花,幫助花粉傳遞;同時,為了吸引昆蟲,許多植物開花時會讓它的小花有特殊的排列,看起來又大又漂亮,這種時候,我們就稱這些小花為「花序」;但有些植物,有著保護一整個花序的苞片,這時候,我們就稱它「總苞」。
不過,講這麼多,它究竟和栗子有什麼關係啊?其實,殼斗科的「殼斗」,就是由雌花總苞發育而成的木質化構造喔!
而板栗在成熟後,殼斗就會十字形裂開,裂成四瓣,露出裡面的三顆栗子。

說到栗子的味道,通常都是想到糖炒栗子的味道,感覺又香、又可口、又甜潤。不過偷偷告訴你們,栗子花的味道可就不那麼令人香甜可口了。
栗子花的味道有一股又濃郁卻又難以言喻的特殊氣味,其實,說得更簡單一點,它聞起來像「嘉明的味道」。對,你想的沒錯,就是精液的味道。雖然成分完全不一樣,但是卻讓人不由自主地想到同一個方向,實際上,醫學上也直接用栗子花散發的味道來形容男性的精液。
不過就算是這樣,糖炒栗子的香味還是非常美好的啊!請大家繼續對栗子抱持著食慾吧!

栗子到底是什麼部位啊?
看完上面的介紹後,有個疑問還是沒被解答到:「栗子到底是果實還是種子啊?」
其實答案是——都是,它是果實,也是種子。
先別急,待我為你好好解釋一番。
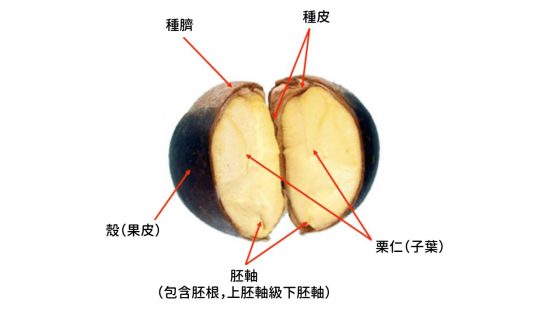
相信有吃過糖炒栗子的朋友們,剝開堅硬的外殼,還會發現裡面還有一層苦苦的皮。
實際上,我們撥開的堅硬外殼就是栗子的「果皮」,那層苦苦的皮,就是「種皮」。
由於板栗是雙子葉植物,而雙子葉植物的種子儲存營養的地方是子葉,所以我們吃的部分則是並不是果肉,而是栗子的子葉還有胚軸的部分。
所以我才會說栗子既是果實又是種子。如果是說包含深褐色堅硬外殼的果皮部分,就是果實;但如果是說剝開後,當然就是指種子啦!
蹦!你知道栗子其實是會爆炸的嗎?

你知道想吃糖炒栗子,可是需要經過兩個爆炸關卡的!
第一個關卡:料理的時候。
其實料理栗子時,不管是用烤的或是微波的,都可能都會爆炸!
原理其實不難,是因為栗子畢竟還是一個封閉的果實,而殼內的栗仁也含有水分,加熱時自然而然就會產生水蒸氣,但當溫度迅速升高,水蒸氣迅速增加,如果封閉的栗子殼受不了裡面過大的壓力,就會爆炸了。
所以,自己在家料理的時候,最好還是讓每個栗子都有個切口,可以排出水蒸氣喔!
你可能會想說,那那些糖炒栗子的攤販呢?他們不也是讓栗子的溫度迅速升高了嗎?嘿嘿,這就是為什麼在製作糖炒栗子時,要把栗子和許多小石頭一起炒啦!
攤販在製作糖炒栗子時,會一直將栗子上下翻動,而待在上層的栗子就會與室溫接觸,所以能降溫,不用有切口也能將栗子給炒熟。同時,小石頭能夠讓栗子非常均勻的受熱,不用過高的溫度也能慢慢把栗子蒸熟。
不過你以為你石頭的妙用就只有如此嗎?不,還遠遠不止呢!
栗子不算是很小顆的東西,如果直接炒,每顆栗子之間的空隙很大,熱傳導就相對慢上許多。石頭的體積比栗子小很多,能填滿栗子間的空隙,使得加熱效率提高許多。
栗子料理完成後,就是第二個關卡:剛加熱好時。
其實只要注意,千萬要等放涼一陣子再吃糖炒栗子啊!如同剛剛前面所說的,栗子裡面有一定的壓力,如果想使用牙齒將剛炒好的糖炒栗子咬出一條縫來,或是想要剝開它,用力壓迫到栗子裡的空間,栗子殼支撐不了壓力,一樣會爆炸的!
實際上,不少夜市裡的攤販也都會提醒大家千萬要等放涼一陣子再吃喔!下次吃栗子時記得千萬要注意啊!
不過在看完這些栗子小知識後,有沒有燃起了想吃糖炒栗子的慾望呢?各位有志一同愛著栗子的同胞們,趕快手刀出門購買,在食慾之秋好好滿足自己吧!
參考資料:
- 生態通—櫟櫟皆辛苦-殼斗科
- 維基百科:苞片
- Donis-González, I. R. (2008). Management of microbial decay of fresh and peeled chestnuts in Michigan. Michigan State University. Plant Pathology. Available from: https://www.researchgate.net/figure/Chestnut-fruit-morphology-A-Chestnut-fruit-longitudinal-cut-B-Spiny-burr-attached-to_fig16_265221329 [accessed 22 Nov, 2019]
- 黑胡桃網路閣—栗子解剖
- 每日頭條:地上的栗子不要亂吃,小心一命嗚呼
- 科技大觀園流體化技術:流體化床燃燒爐–由糖炒栗子談起
- 每日頭條:小心!用烤箱做糖炒栗子易爆炸 告訴你防炸小妙招
十一月專題【食慾之秋】天冷了,來點好吃的吧!

終於走過嚴厲的夏天,時序漸漸邁入秋高氣爽、食慾大開的時節。究竟秋天這個季節有什麼特別之處嗎?我們筷下的食物裡又有哪些科學事呢?
接下來每個小周末與周末晚間,與我們一同歡慶豐收季節,一起享用「食慾之秋」吧!































