

 生物與非生物之間,有什麼不一樣?什麼是生命?當我們走在海邊的沙灘上,腳下遍布著有美麗花紋的小石子,旁邊有著一顆顏色幾乎相同的小貝殼。雖然已經失去了生命,但我知道它確實曾有生命在運作。那麼,小貝殼和小石子的決定性差異是什麼?日本分子生物學福岡伸一教授,帶我們從分子的層次,了解什麼是生命。
生物與非生物之間,有什麼不一樣?什麼是生命?當我們走在海邊的沙灘上,腳下遍布著有美麗花紋的小石子,旁邊有著一顆顏色幾乎相同的小貝殼。雖然已經失去了生命,但我知道它確實曾有生命在運作。那麼,小貝殼和小石子的決定性差異是什麼?日本分子生物學福岡伸一教授,帶我們從分子的層次,了解什麼是生命。
閱讀全文:生物與非生物之間,在《生命是最精彩的推理小說》 | 張清浩律師的部落格。
-----廣告,請繼續往下閱讀-----
生物與非生物之間,有什麼不一樣?什麼是生命?當我們走在海邊的沙灘上,腳下遍布著有美麗花紋的小石子,旁邊有著一顆顏色幾乎相同的小貝殼。雖然已經失去了生命,但我知道它確實曾有生命在運作。那麼,小貝殼和小石子的決定性差異是什麼?日本分子生物學福岡伸一教授,帶我們從分子的層次,了解什麼是生命。
閱讀全文:生物與非生物之間,在《生命是最精彩的推理小說》 | 張清浩律師的部落格。
本文與 益福生醫 合作,泛科學企劃執行
昨晚,你又在床上翻來覆去、無法入眠了嗎?這或許是現代社會最普遍的深夜共鳴。儘管換了昂貴的乳膠枕、拉上百分之百遮光的窗簾,甚至在腦海中數了幾百隻羊,大腦的那個「睡眠開關」卻彷彿生鏽般卡住。這種渴望休息卻睡不著的過程,讓失眠成了一場耗損身心的極限馬拉松 。
要理解失眠,我們得先認識身體的一套精密防衛系統:下視丘-垂體-腎上腺軸(HPA axis) 。這套系統原本是演化給我們的禮物,讓我們在面對劍齒虎或突如其來的危險時,能迅速進入「戰鬥或快逃」的備戰狀態。當這套系統啟動,腎上腺就會分泌皮質醇 (壓力荷爾蒙),這種荷爾蒙能調動能量、提高警覺性,讓我們在危機中保持清醒 。
然而,現代人的「劍齒虎」不再是野獸,而是無止盡的專案進度、電子郵件與職場競爭。對於長期處於高壓或高強度工作環境的人們來說,身體的警報系統可能處於一種「切換不掉」的狀態。
在理想的狀態下,人類的生理時鐘像是一場精確的接力賽。入夜後,身體會進入「修復模式」,此時壓力荷爾蒙「皮質醇」的濃度應該降至最低點,讓「睡眠荷爾蒙」褪黑激素(Melatonin)接棒主導。褪黑激素不僅負責傳遞「天黑了」的訊號,它還能抑制腦中負責維持清醒的食慾素(Orexin)神經元,幫助大腦順利關閉覺醒開關。

然而,當壓力介入時,這場接力賽就會變成跑不完的馬拉松賽。研究指出,長期的高壓環境會導致 HPA 軸過度活化,使得夜間皮質醇異常分泌。這不僅會抑制褪黑激素的分泌,更會讓食慾素在深夜裡持續活化,強迫大腦維持在「高覺醒狀態(Hyperarousal)」。 這種令人崩潰的狀態就是,明明你已經累到不行,但大腦卻像停不下來的發電機!
長期的睡眠不足會導致體內促發炎細胞激素上升,而發炎反應又會進一步活化 HPA 軸,分泌更多皮質醇來試圖消炎,高濃度的皮質醇會進一步干擾深層睡眠與快速動眼期(REM),導致睡眠品質變得低弱又破碎,最終形成「壓力-發炎-失眠」的惡行循環。也就是說,你不是在跟睡眠上的意志力作對,而是在跟失控的生理長期鬥爭。
面對這種煞車失靈的失眠困局,科學家們將目光投向了人體內另一個繁榮的生態系:腸道。腸道與大腦之間存在著一條雙向通訊的高速公路,這就是「菌-腸-腦軸 (Microbiome-Gut-Brain Axis, MGBA)」,而某些特殊菌株不僅能幫助消化、排便,更能透過神經與內分泌途徑與大腦對話,直接參與調節我們的壓力調節與睡眠節律。這種菌株被科學家稱為「精神益生菌」(Psychobiotics)。

在眾多研究菌株中,發酵乳桿菌 Limosilactobacillus fermentum PS150 的表現格外引人注目。PS150菌株源於亞洲益生菌權威「蔡英傑教授」團隊的專業研發,累積多年功能性菌株研發經驗的科學成果。針對臨床常見的「初夜效應」(First Night Effect, FNE),也就是現代人因出差、換床或環境改變導致的入睡困難,俗稱認床。科學家在進行實驗時發現,補充 PS150 菌株能顯著恢復非快速動眼期(NREM)的睡眠長度,且入睡更快,起床後也更容易清醒。更重要的是,不同於常見的藥物助眠手段(如抗組織胺藥物 DIPH)容易造成快速動眼期(REM)剝奪或導致睡眠破碎化,PS150 菌株展現出一種更為「溫和且自然」的調節力,它能有效縮短入睡所需的時間,並恢復睡眠中代表深層修復的「Delta 波」能量。
科學家發現,即便將 PS150 菌株經過特殊的熱處理(Heat-treated),轉化為不具活性但保有關鍵成分的「後生元」(Postbiotics),其生物活性依然能與活菌媲美 。HT-PS150 技術解決了益生菌在儲存與攝取過程中容易失去活性的痛點,讓這些腸道通訊員能更穩定地發揮作用 。
在臨床實驗中,科學家觀察到一個耐人尋味的現象:當詢問受試者的主觀感受時,往往會遇到強大的「安慰劑效應」,無論是服用 HT-PS150 還是安慰劑的人,主觀上大多表示睡眠變好了。這種「體感上的進步」有時會掩蓋真相,讓人分不清是心理作用還是真實效益。
然而,客觀的生理數據(Biomarkers)卻揭開了關鍵的差異。在排除主觀偏誤後,實驗數據顯示 HT-PS150 組有更高比例的人(84.6%)出現了夜間褪黑激素分泌增加,且壓力荷爾蒙(皮質醇)顯著下降,這證明了菌株確實啟動了體內的睡眠調控系統,而不僅僅是心理安慰。
最值得關注的是,對於那些失眠指數較高(ISI ≧ 8)的族群,這種「生理修復」與「主觀體感」終於達成了一致。這群人在補充 HT-PS150 後,不僅生理標記改善,連原本嚴重困擾的主觀睡眠效率、持續時間,以及焦慮感也出現了顯著的進步。
了解更多PS150助眠益生菌:https://lihi3.me/KQ4zi
睡眠從來就不只是單純的休息,而是一場生理功能的全面重整。想要重獲高品質的睡眠,關鍵在於為自己建立一個全方位的修復生態系。
這套系統的基石,始於良好的生活習慣。從減少睡前數位螢幕的干擾、優化室內環境,到作息調整。當我們透過規律作息來穩定神經系統,並輔以現代科學對於 PS150 菌株的調節力發現,身體便能更順暢地啟動睡眠開關,回歸自然的運作節律。
與其將失眠視為意志力的抗爭,不如將其看作是生理機能與腸道微生態的深度溝通。透過生活作息的調整與科學實證的支持,每個人都能擁有掌控睡眠的主動權。現在就從優化生活型態開始,為自己按下那個久違的、如嬰兒般香甜的關機鍵吧。

討論功能關閉中。
本文由 肺纖維化(菜瓜布肺)社團衛教 合作,泛科學撰文
在現代醫學的警示清單裡,乳癌、大腸癌這些疾病大家都不陌生;但有一個「隱蔽且致命」的威脅卻常被忽視,那就是「肺纖維化」。其中最常見的類型「特發性肺纖維化」(IPF),其預後往往不太樂觀,確診後的五年存活率甚至比許多常見的癌症還低。
首先,我們得先破解一個迷思:肺纖維化並不是單一疾病,而是許多種間質性肺病的共同表現。當我們聽到「肺纖維化」,腦中常浮現「菜瓜布肺」的形象,患者的肺部外觀充滿一個個空洞與疤痕,像極了乾燥的絲瓜。這精準描繪了肺部組織逐漸硬化、失去彈性的過程。
更重要的是,IPF 這類肺纖維化的威脅在於「不可逆」的特性,一旦形成就很難逆轉。這跟部分 COVID-19 康復者身上、仍有機會復原的肺纖維化,是兩種完全不同的概念。

為什麼好端端的肺會變成菜瓜布?這其實是一場身體修復機制失控的結果。
「纖維化」的組織,就是肺部間質組織(interstitium)的疤痕化。間質是圍繞在肺泡周圍,包含血管與支持肺部結構的結締組織。在正常情況下,肺部損傷後會啟動修復機制,並再生健康組織。但在肺纖維化的患者體內,這套修復機制卻「當機」了。
身體會不斷地發出訊號,導致負責修復工作的「纖維母細胞」(fibroblasts)被過度活化,進而失控地沉積膠原蛋白疤痕組織,最終在肺部形成永久性的纖維化。
科學家發現,這個過程之所以棘手,在於它是一個「惡性循環」,肺部同時存在著「發炎反應」與「纖維化」這兩條路徑 ,它們相互加乘,演變成難以阻斷的強大破壞力。
雖然特發性肺纖維化 (IPF) 的具體成因不明 ,但已知某些特定族群的風險更高。例如抽菸,特定年齡與性別(50歲以上男性)、長期暴露於粉塵環境的工作者(農業、畜牧業、採礦業…)、胃食道逆流者。此外,患有自體免疫疾病(如類風濕性關節炎、乾燥症、硬皮症、皮肌炎/多發性肌炎,)的患者,他們併發肺纖維化的機率遠高於一般人,必須特別警覺。

面對這個不可逆的疾病,醫學界長年束手無策,直到 2014 年才迎來一道曙光。美國 FDA 批准了兩種機制不同的新藥:Nintedanib 和 Pirfenidone。這兩種藥物的出現是治療史上的分水嶺,首度被證實能夠「延緩」IPF 患者肺功能的惡化速度。
然而,這場戰役尚未結束。現有的治療雖然帶來了希望,卻也凸顯了「未被滿足的醫療需求」。從機制上來看,這些藥物主要抑制的是「纖維化路徑」。
這讓科學界開始思考這個未被滿足的棘手問題:既然疾病的本質是「發炎」與「纖維化」的雙重打擊,那麼,我們是否能找到「同時抑制」這兩條路徑的全新策略,從而更有效地打斷這個惡性循環?
為了解決難題,科學家將目光鎖定在一個細胞內的酵素:磷酸二酯酶 4B(PDE4B)。
為什麼鎖定它?讓我們看看它的「雙重作用」機制:
簡單來說,鎖定並抑制 PDE4B,就像是同時抑制了免疫風暴與纖維化的工程,有望從雙從抑制打擊這個惡性循環。
近十年來,全球在肺纖維化領域投入了大量的臨床試驗,我們相信,在科學家逐步破解肺纖維化惡性循環的複雜難題後,期盼未來能為無數患者爭取到更安全、健康的生活與未來。
最後,我們必須再次提醒,特發性肺纖維化(IPF)與漸進性肺纖維化(PPF)是極具破壞性、且不可逆的疾病。面對這個比癌症更致命的對手,雖然現有的治療手段能延緩惡化,但無法逆轉已經形成的肺部疤痕組織,因此「早期診斷、早期治療」仍是對抗肺纖維化最重要的黃金時刻。

討論功能關閉中。
本文轉載自中央研究院研之有物,泛科學為宣傳推廣執行單位。
我們怎麼「看到」顏色,「察覺」東西在動?大腦如何產生視覺?中央研究院「研之有物」專訪院內細胞與個體生物學研究所所長李奇鴻,他是國際知名的神經科學家,過去長期在美國國家衛生院(National Institutes of Health)做研究,2018 年回到中研院貢獻自己所學。李奇鴻的實驗室主要是以果蠅視覺系統為模型,研究神經元如何在發育過程形成複雜的突觸連結,以及神經迴路如何產生視覺來引導動物行為。
神經系統如何運作?這對以前的科學家來說是黑盒子。由於大腦發生錯誤或出問題時,會直接表現在外在行為上,早期科學家想了解人腦運作機制,只能透過腦部哪裡受傷壞掉或中風等,知道腦部的大概功能區域,但沒辦法進入細胞層次。
「在生物學的發展上,除了需要有智慧的思考,其他都要靠技術去推動。你可能想到一個有趣的題目,但也許要 30 年後,才出現足夠的技術來解決問題。」李奇鴻舉例,從光學顯微鏡、電子顯微鏡、電生理技術、分子生物學到結構生物學發展,每個都在細胞、分子、及系統層次開啟了新的世界。
隨著顯微技術與遺傳工程日益完備,果蠅成為現今熱門的腦科學研究對象。李奇鴻指出,「果蠅的生長速度快,相較老鼠要幾個月成熟,果蠅只要兩週。果蠅的大腦複雜程度介於人和單細胞生物中間,結構跟人高度相似,成果可應用在人身上。」
因此,近 10 幾年來是神經科學大起飛時代,科學家透過遺傳學方法控制果蠅的神經元活性、觀察行為,藉此了解哪些基因會影響大腦發育和運作,逐漸破解神經迴路的奧祕。
「我在選博士後研究時,想到底要做線蟲、老鼠、魚、果蠅或其他模式生物?最後才選果蠅。回想起來,近年剛好碰到果蠅相關技術蓬勃發展,選果蠅是很正確的決定!」李奇鴻笑道。
李奇鴻引用知名神經科學家 David Marr 的三層假說(tri‐level hypothesis),認為大腦運作有三個層次:
李奇鴻表示,「過去多數神經科學家都在討論 computation,再探究 algorithm,卻沒辦法解決 implementation 。現在因為具備技術,科學家終於能找出 implementation,再回推上層問題,甚至發現 algorithm 跟原本想的不一樣。」
關於神經系統的操作方式(Algorithm level),也有因為技術進步而解決爭議的案例。李奇鴻舉例,以前神經科學家在研究視覺系統感受物體運動的機制,曾出現幾種理論,HR 理論認為神經訊號是用乘法,另一派 BL 理論認為是用減法,爭議了很久。
近年科學家發現,原來視網膜感知系統的運算機制是混合的,一共三種,稱為 HR-BL 混合視覺運動偵測器。過去兩派都只對了一半。
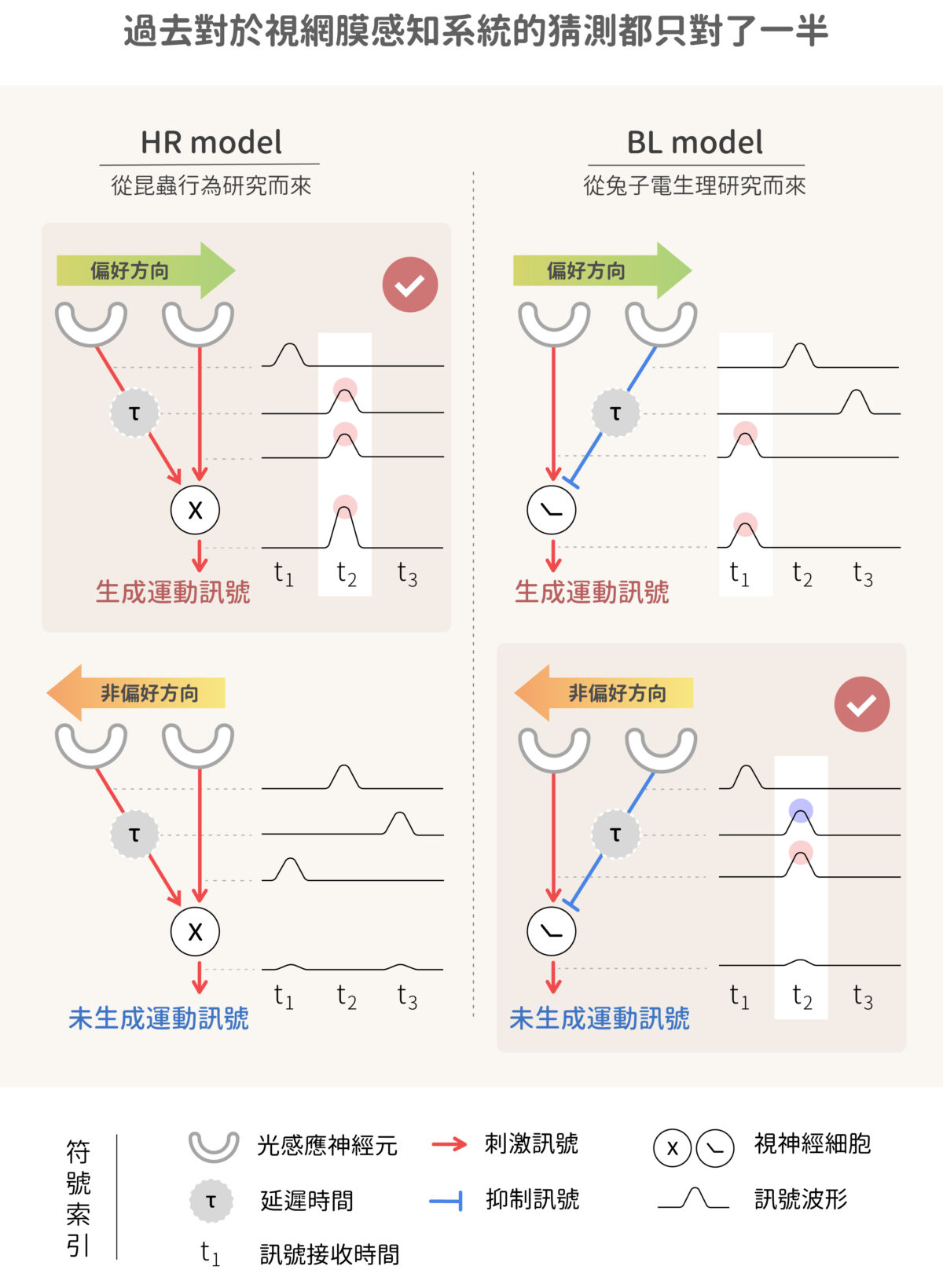
Hassenstein-Reichardt(HR)模型:從昆蟲行為研究而來。
Barlow-Levick(BL)模型:從兔子電生理研究而來。
近代電腦的所有運算都能用 and、or、Xor 三個邏輯閘表達,科學家想知道,大腦裡有沒有類似但更高階的神經迴路運作方式?「從感官到行為比較容易觀察和操作,目前在視覺運動方面的神經迴路運作,我們知道的最多。」
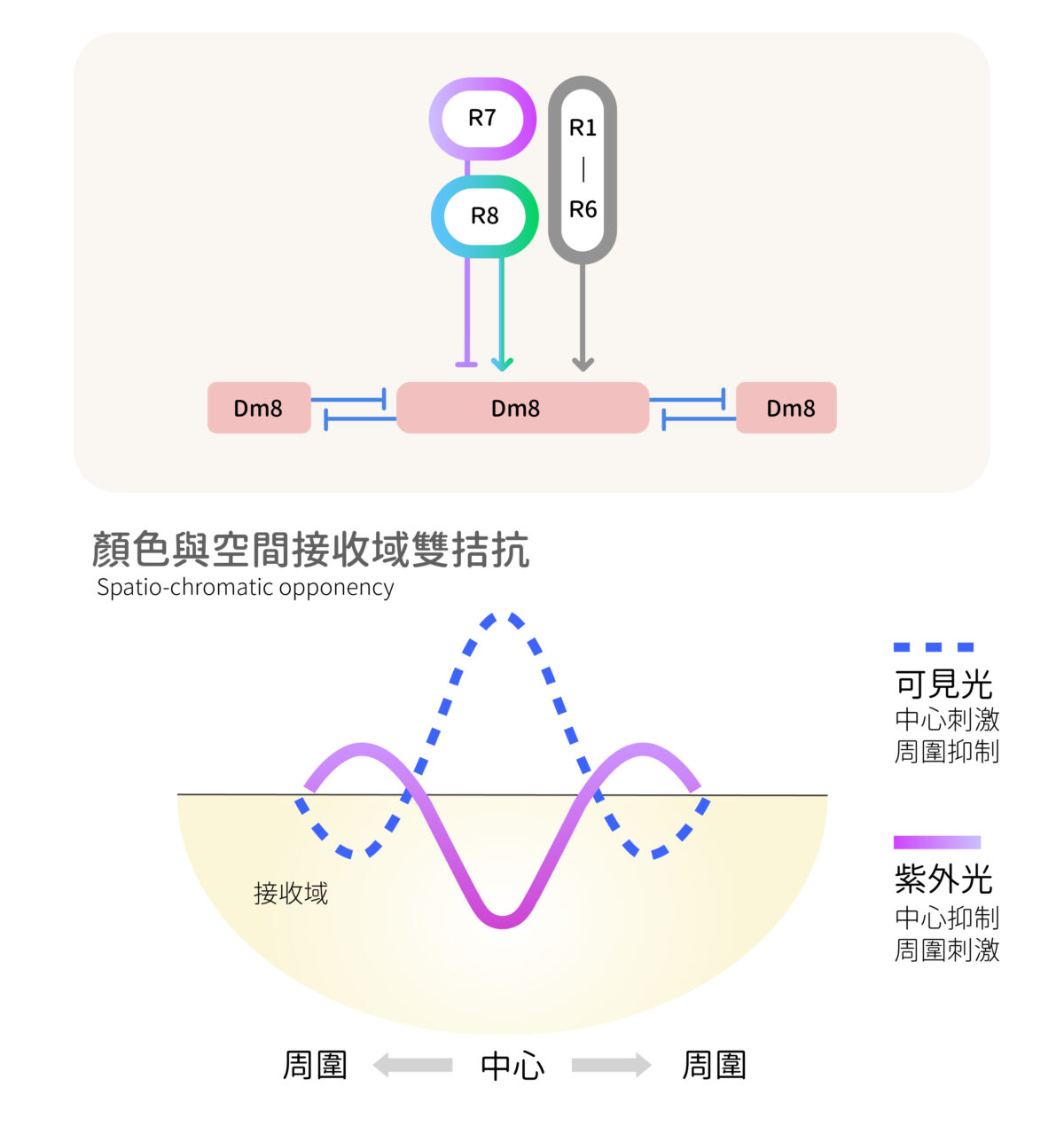
李奇鴻近年在做昆蟲視覺與行為研究,發現昆蟲在感受顏色,如綠光和紫外光時,感光細胞的處理方式是先將紫外光跟綠光的強度做比較,把兩個光的強度相減,讓原本兩個訊號變成一個訊號,所謂的「顏色拮抗」。
「這種神經迴路能解析、比較兩個顏色強度的差異性,因為大部分在視覺上最重要的正是對比。拮抗運算模組能在一片訊號裡找出哪裡最強、其他較弱。其他感官機制也一樣,像觸摸物品時有凸出來的部分較重要,聽覺上要找出哪個聲音特別高等,讓最重要的訊號能凸顯出來。」李奇鴻補充道。
2021 年李奇鴻的團隊首次發現果蠅視覺系統堆疊了多套拮抗運算模組,以達成顏色及空間接受域雙拮抗的效果,成果發表在《Current Biology》。這樣的神經迴路可以比較相鄰的顏色,產生色彩區間對比感。「沒這樣的功能,我們就看不出紅配綠很悲劇了!」李奇鴻笑道。
科學家們正努力鑽研果蠅大腦的神經運算迴路,希望逐步整理出基本運算模組。或許有一天,看似複雜的大腦功能,都可能用基礎的迴路來破解!
「我滿晚才走上科學研究的道路。我對電腦有興趣、喜歡寫程式,大學上中國醫藥學院醫學系,家裡也希望我當醫生。不過在實習時,我發現自己對治療病人沒興趣,反而對問題或疾病本身更有興趣。跟幾個老師談過之後,我決定不當醫生,跑去清華大學讀生命科學,後來就到中研院。」
因為有醫學背景,一開始比較想做能立刻解決問題的研究,像是用蛋白質跟毒素的綜合體來治療癌症。但後來了解,如果沒有深刻了解致病機制、沒有鑽進基礎科學研究,很難有突破。
後來去美國洛克斐勒大學攻讀博士,在洛克斐勒讀書期間,大家常互相交流,對我有很大的啟發。那時我在鑽研結構生物學,希望了解疾病真正的生理過程,曾解開愛滋病病毒跟人體信號傳遞有關的蛋白質結構。
博士畢業前,我接觸到神經科學,感到很有興趣,就去加州大學洛杉磯分校(UCLA)讀博士後,學神經科學裡的發育學,想了解大腦在發育過程是如何用不同分子在細胞間傳遞訊息。那時我待在很大的實驗室,老師不太管學生,要自己想辦法或跟旁邊的人學習,很多人素質都很高,學習環境很好。
之後我進入美國國家衛生院(National Institutes of Health,NIH)開始開實驗室帶自己的團隊,待了 16 年,算是真正進入神經科學領域,直到現在依然在做相關研究。
每個人的人生選擇,都被以前的經歷主導,如果沒有醫學背景,恐怕我不會去學結構生物學或走入大腦神經科學領域。
「我 26 歲出國,在美國也待 26 年,幾乎完全融入美國生活,實驗室運作得蠻好,連太太也是美國人。但在美國很多年後,內心出現一個很深感覺:我在臺灣待過這麼久,臺灣是我進入科學的起點,也許該回來教教臺灣的子弟。」
剛開始有些想法,曾受邀回臺演講幾次,但沒有下決心。後來出現一個重要轉捩點。中研院分子生物研究所 30 週年慶時邀我回來演講,那時有機會跟歷任所長聊天,這些所長中許多是我過去在中研院碰過的老師。聊了後感觸很深,發現每任所長都要面對分生所的成長或各種問題,每個所長都有獨到的見解和重要貢獻。
我看到分生所運作得很好,覺得非常感動, 內心想:也許我回來能效法他們,也許對中研院細胞與個體生物學研究所的發展能有一點點實質貢獻。
雖然如果待在美國國家衛生院,我也會有這樣一個機會,但還是想帶自己的子弟,把力氣用在自家子弟身上,讓自己的國家和組織進步。我想將在美國國家衛生院學到的經驗,像哪些組織可以運作、哪些不行,嘗試帶回臺灣。
我很清楚可能碰到的問題,像科學研究會受影響,要重新花幾年時間建立實驗室,但那次契機讓我徹底下定信心。我曾跟廖俊智院長開玩笑,就算不給我錢,我大概也會回來。因為真的覺得這是一個很好的機會,自己能為中研院、為臺灣做些事。畢竟中研院也一直都像我的家!
不過,畢竟過去在美國實驗室和家裡都是講英文,只有打電話給媽媽會說臺灣話,因此, 2018 年剛回臺灣時,國語講得不太流利,臺灣話反而比較流利。
「國外最大特點是學術交流很頻繁,雖然國內也蠻頻繁,但他們交流層次更深入。也就是說,我跟參與的老師交流之後,常能改變想法、做事方法或方向,且是正向的改變。」
國外老師受邀演講,會很積極在幾小時內一直談,在一天中完全沉浸其中,不單講出自己在做的東西,也要求聽眾給予批評或建議等,彼此有深度交流,我每次參加都覺得收穫很多並產生合作可能性。
國內我的經驗是,演講結束後比較缺乏機會跟其他老師深度溝通,領完演講費就屁股拍拍坐高鐵回來。這可能是國內的慣有模式,我覺得需要改變。現在所內我也要求大家,既然花錢請老師來,一定要做深度交流,請對方給予建議。
重要的不是形式或邀到諾貝爾獎得主之類,而是在演講結束後、這個人走出我的辦公室、這些人離開後,對我做的事或做事方法,是不是有什麼實質的改變?在其他科學家交談中是否能得到啟發,改變自己的思考或做實驗方式?或聽聽別人告訴你,你還有哪些沒想到的地方?
分享,也是一種很重要的技術,在交流過程中,當我們可以把一件事講清楚,自己也會茅塞頓開,知道問題在哪。
現在所裡的計畫是把老師分成各種不同興趣小組,組內做交流或有跨組活動。其餘像寫計劃、申請經費、經營實驗室或撰寫並發表文章,這些是基本技術問題。
做任何工作,一個是基本的核心技術,如果沒有「技」就無法生存;另一個是 「藝」(Art) , 可以驅動你一直做下去。訓練人才時,除了培養技術,還要訓練 Art。
「我想在科學裡面,Art 有很多面向。例如,你怎麼選擇一個問題,怎麼找切入點,如何把一個大問題拆成幾個可攻破的部分,一步步去解開,這是一種 Art。尤其在選擇問題和切入點上,要有獨特的見解或洞燭先機才能成功。」
科學家必須創造有用的知識。什麼叫有用的知識呢?就是聽到學到後,會改變你想事情的方向或做事的方法。很多東西都可以研究,只要科學方法夠嚴謹,都可以得到一些知識。但到底要選擇什麼題目呢?什麼叫做有趣的問題呢?評斷這些就是科學的 Art 。
如果說在人類前面是一個黑暗深淵,知識像光照亮我們前面的路,科學家就像站在最前面,要知道如何踏出那一步?怎麼踏出去?這是 Art。
當科學家看到一個問題、問題成形後,最重要的關鍵是如何選擇一個核心問題去解決。就像玩拼圖時,要放下去最核心、最重要的那塊拼圖。
我回到臺灣後,覺得這裡的研究環境很好,儀器不輸人家,老師很優秀。但可能我們多半只是關注自己的研究,沒有花時間認真去思考,最重要的一塊拼圖在哪裡?當我們有更深度的交流,才能找到最核心的那一塊,做出最重要的貢獻。

「在碩士、博士訓練中最重要的關鍵,是從「讀」科學變成真正「做」科學。我們攤開一本教科書,看到裡面講這個、那個,只是讀人家的科學。即使去念了原始文章,仍然是看著科學怎麼被別人做出來而已。」
自己真正做研究才知道,教科書上每一頁、每一句,背後都可能有數千篇文章支持,那時才知道自己很渺小,懂得謙虛,了解自己一生能做的有限。
所以,每次要跨出一小步,要想該怎麼跨最有效率、得到最大效果。我認為,在碩士班或博士班,最重要的就是了解這種感覺。
有些學生可能覺得,反正我很渺小,世界這麼大,即使做一輩子,即使最成功的科學家,也不過是得到教科書上面的一句話而已,我怎麼做都沒關係啊。 但我們必須帶領學生了解,這個計畫不是老師叫你做才做,而是讓學生覺得這個計畫是自己的,有前進和發展的空間,就像自己的小孩,必須負責。
以前在碩、博士班,剛開始學會技術、實驗做出結果,或能像人家一樣發表文章,會很高興,但這很短暫,真正的轉捩點是我知道有什麼事,是全世界任何人都不知道的那種驕傲,才是真的能支持很久的。我還記得在某一天做到早上五點,從實驗室走出來,知道有個東西全世界只有我知道的喜悅!
當學生曾感受這種發現真實的快樂,你不用規定他早上幾點來、晚上幾點走,他自己就有動機做。
當一個人想這東西應該是怎樣,想辦法做實驗證明出來時,那真的是一種快樂。我想,這是任何其他行業都沒辦法比較的!
學生是要培養成未來的科學家、獨當一面,應該讓他自己走。即使在你看得到的地方,也要讓他自己走出來,而且,他自己想到的,比你告訴他來的有用。
其實,我當老師最興奮時,是學生告訴我那些我不知道的事,會覺得很喜悅,學生想到我沒想到的東西,表示他們有進步,比我還厲害,這很棒!




























