

- 本文轉載自特有生物研究保育中心,《自然保育季刊》第 112 期
- 作者 / 鄭錫奇|行政院農業委員會特有生物研究保育中心研究員兼主任秘書、陳宏彰|行政院農業委員會特有生物研究保育中心計畫助理、周政翰|台灣蝙蝠學會理事
台 9 線蘇花公路山區路段改善工程歷時 9 年的努力終於在 2020 年 1 月 6 日全線通車。近年政府進行重大建設時日益重視工程對環境及生物多樣性的影響評估,蝙蝠類因其物種繁多、族群數量龐大、食性獨特、活動範圍廣泛且對環境變化敏感,其生存棲地品質攸關族群存續狀況,因此相當適合作為反應環境變化的類群。
上一篇〈台灣蝙蝠知多少?沿著蘇花公路,探尋豐富的蝙蝠多樣性(上)——蘇花改特輯(二)〉我們介紹了許多種臺灣蝙蝠以及調查過程,這篇我們將探討這些資料的分析結果。
棲所難尋但資料珍貴
蝙蝠棲息的處所通常隱密而不易探尋。不過, 一旦發現某種蝙蝠的棲所及族群,則可以進行深入研究以獲得許多生態相關的珍貴資訊。除了在夜間外飛覓食時段,蝙蝠在棲所度過很長的時間,包括其生活史的不同階段,諸如白天休息、尋覓伴侶交配、生殖育幼、日間休眠或冬季冬眠等。棲所還能提供保護的功能,降低蝙蝠被天敵掠食或人類干擾的機會,以及抵禦外界環境或氣候變化的影響,可見適當的棲所對涵養蝙蝠族群而言相當重要。

本計畫歷年陸續在調查樣區中發現蝙蝠的棲所,諸如群居型的臺灣葉鼻蝠、臺灣小蹄鼻蝠,以及獨居型的臺灣大蹄鼻蝠喜歡陰暗潮濕的洞穴、隧道、涵洞等處;日間棲息在林道旁新生芭蕉捲葉中的玄彩蝠;會利用東岳冷泉鐵路高架橋橋墩下作為夜間棲所的堀川氏棕蝠。當發現臺灣葉鼻蝠或臺灣小蹄鼻蝠的族群時,我們會持續瞭解其族群量的變動趨勢,以及生殖育幼的季節;相對而言,獨居的臺灣大蹄鼻蝠雖較不容易發現,然而我們曾觀察到有 1 隻雌性個體居然連續使用同一處廢棄木屋長達 3 年之久, 而在春季時又發現另 1 隻雌性個體共棲,這種現象相當罕見;依據尤宣亞 (2015) 針對臺灣大蹄鼻蝠配對系統的研究指出,成體雌蝠間並不會共處於同一 棲所,但在懷孕期(4-5 月)則會和去年生產的幼蝠(或亞成蝠)共棲,因而推測牠們可能是去年繁殖的 一對母女蝠。

地區新紀錄種的發現
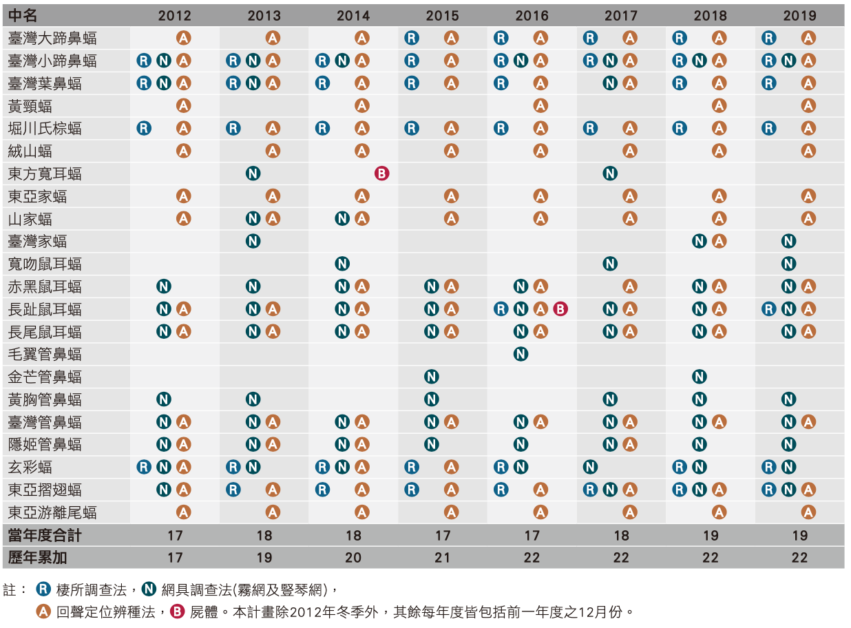
我們執行計畫的第一 (2012) 年即發現了 17 種蝙蝠,之後每年均可調查到 17-19 種之多,而且在前 5 年幾乎每年都有地區新種類的發現,譬如 2013 年增加了東方寬耳蝠(網具捕捉)及臺灣家蝠(音頻判識)而達 19 種;2014 年增加寬吻鼠耳蝠(網具捕捉)達 20 種;2015 年則再增加金芒管鼻蝠(網具捕捉)達 21 種;2016 年新增毛翼管鼻蝠(網具捕捉)後使得物種累積達 22 種至今 (2020) 年上半年。

參考特生中心於 2007 至 2010 年間在雲林縣斗六丘陵湖山水庫預定地與周邊區域所進行的多年蝙蝠調查結果,亦呈現類似的物種數累加趨勢,即幾乎每年都會有 1-2 種地區新紀錄種蝙蝠的發現 (鄭錫奇等 2010)。也就是說,若要確切得到一個地區相對完整的蝙蝠相,不僅需要運用多樣化的調查方法,而且須按季節持續 進行多年(至少 5 年)的調查始能達成。然而,納悶的 是,雖然我們努力調查多年,除了顯著地增加調查區域內 15 種蝙蝠的新發現紀錄外,迄今仍無發現弘益生態有限公司於 2010 年在同一區域調查所得之高頭蝠 (Scotophilus kuhlii) 分布資料。
與昔日調查資料比較
特生中心 2003 年在宜蘭與花蓮兩縣市進行的蝙蝠類調查,總計發現了 19 種蝙蝠(鄭錫奇與張簡琳玟 2003),然而若只篩選該成果中,沿蘇花公路及兩側延伸海拔 500m 以下區域(因本蘇花改計畫調查範圍低於海拔 500m),則為 12 種;另於 2004 年執行宜蘭縣和花蓮縣野生哺乳類動物及花東地區的翼手目調查,共發現 20 種蝙蝠,而在低於 500m 的區域則僅發現 9 種(鄭錫奇等 2004);而 2006 年進行花蓮縣野生哺乳類動物調查時,於秀林鄉發現了臺灣葉鼻蝠與渡瀨氏鼠耳蝠(現稱赤黑鼠耳蝠)2 種蝙蝠 (鄭錫奇等 2006)。
根據上述文獻所發現的物種與本計畫多年 (2012-2019 年) 的結果比較,同一海拔區域內僅臺灣無尾葉鼻蝠為本計畫迄今尚未有記錄的種類,而本計畫所發現的堀川氏棕蝠、絨山蝠、東方寬耳蝠、寬吻鼠耳蝠、毛翼管鼻蝠、金芒管鼻蝠、 黃胸管鼻蝠、隱姬管鼻蝠及東亞游離尾蝠等 9 種則為昔日文獻未曾記錄的地區新紀錄種。
太魯閣國家公園管理處曾委辦執行「太魯閣國家公園蝙蝠族群動態智慧監控規劃」(謝伯娟與陳宏彰 2016),該計畫同樣採網具捕捉、超音波測錄及棲所探查等 3 種調查方法進行調查,惟其執行範圍(於花蓮縣山區)沿台 8 線中橫公路東段涵蓋園區內低、中、高海拔區域,結果發現 5 科 15 屬 24 種,其中除了分布於中高海拔的臺灣長耳蝠、紅棕鼠耳蝠與姬管鼻蝠外,其他 21 種在本計畫皆有發現。可見台 9 線蘇花公路沿線及周邊範圍的蝙蝠物種多樣性堪稱豐富。



蝙蝠的季節性遷移行為
由近 8 個年度的調查結果顯示,雖然不同季節發現之種數不盡相同,然而春、夏、秋季為物種出現較多的季節(2018 年春季最多可達 17 種),蝙蝠活動力較低的冬季則相對較少(2015 年最少僅發現 8 種)。雖然至少 15 種蝙蝠四季均可在調查範圍中發現,但部分物種僅於特定季節出現,如黃頸蝠和絨山蝠只零星於春、夏、秋季發現(音頻資料),在冬季則無任何紀錄。
臺灣的蝙蝠會隨著季節的更迭而進行海拔垂直遷徙現象陸續被發現 (鄭錫奇及張簡琳玟 2008;鄭錫奇等 2009),其中以黃胸管鼻蝠最為典型,牠們在溫暖的季節 (如夏季) 通常會在低海拔區域棲息、活動及繁殖育幼,而在冬季時則遷到高海拔超過 3,000m 的山區度冬,年復一年地在不同海拔間遷移。
然而,我們調查捕獲的資料顯示,在 2013 年秋季及 2017 年冬季在花蓮秀林鄉同一樣區 (海拔 120m) 各捕獲 1 隻東方寬耳蝠,這 2 筆資料為該物種目前全臺海拔分布最低紀錄;同樣地於 2014、2017 年冬季及 2019 年秋季分別在花蓮秀林鄉樣區內各捕獲 4 隻、1 隻及 1 隻的寬吻鼠耳蝠雄性個體,此紀錄亦為寬吻鼠耳蝠於臺灣的最低海拔 (120m) 分布資料;另外也於 2015 年秋季及 2018 年度春季於花蓮秀林鄉和平地區的不同樣區內捕獲各 1 隻個體的金芒管鼻蝠。唯一 1 隻毛翼管鼻蝠則在 2016 年秋季以網具捕獲。這些溫暖季節主要分布於中高海拔的物種竟然在冬季時逆向降遷至蘇花改低海拔區域活動,其原因仍不清楚。

捕捉標放探討時空變動
歷年研究人員以網具捕獲或棲所探查捕撈的個體都會以具號碼的翼標標示個體,並在原地釋放, 之後藉由再捕獲紀錄探討其不同時空下的變動情形。近 8 個年度本計畫總共捕捉標放了 17 種共 580 隻的蝙蝠,其中以臺灣管鼻蝠 219 隻最多,其次為玄彩蝠 (85 隻)、隱姬管鼻蝠 (66隻)、長趾鼠耳蝠 (64 隻)、長尾鼠耳蝠 (36 隻)、赤黑鼠耳蝠 (25 隻)、堀川氏棕蝠 (24 隻)、臺灣小蹄鼻蝠 (22 隻) 等,其餘如臺灣葉鼻蝠、東亞摺翅蝠、黃胸管鼻蝠、寬吻鼠耳蝠、臺灣大蹄鼻蝠、東方寬耳蝠、山家蝠、金芒管鼻蝠及臺灣家蝠之標放個體都少於 10 隻。
標放個體中有 8 種 78 隻陸續再被重複捕捉,最多者為臺灣管鼻蝠 31 隻,其中有 2 隻重複捕捉 4 次,10 隻 3 次,再捕捉間隔時間最長為標放 3 年後於相同樣點再次捕獲。這些重復捕捉資料顯示, 臺灣管鼻蝠對於當地棲地有明顯的棲地重複利用習性,牠們會棲息的處所包括乾枯的香蕉捲葉叢 (周政翰等 2008)、戶外枯木燈罩 (謝伯娟與陳宏彰等 2016)、枯萎的月桃捲葉 (鄭錫奇等 2017) 等。次多者為玄彩蝠,有 22 隻個體被重覆捕捉,有 3 隻捕捉紀錄達 5 次 (次數最多者),其中 1 隻連續 4 年 (2012- 2015) 在相同樣區的新生芭蕉捲葉中被發現,其餘達 4 次者有 4 隻、3 次者 1 隻、2 次者有 13 隻。
換言之,這些玄彩蝠經常出現在捕捉標放的地點或鄰近區域內。根據許家維 (2016) 在臺中烏石坑地區的研究,玄彩蝠對於當地蕉叢棲所及棲息環境有相當程度的依賴性,因此一旦蕉叢大量消失,都將影響玄彩蝠族群的存續。此外,有 4 隻長趾鼠耳蝠在不同年間於相同樣點捕獲,其中間隔年度最長為第一次捕捉標放 (2012年) 後的第 6 年 (2018)(間隔年度最長紀錄)。
另如前述,我們也曾發現臺灣大蹄鼻蝠會連續數年四季中均棲息在同一洞穴中、堀川氏棕蝠會多年重複利用一處橋墩下作為夜間休息處;其他較零星的捕捉標放資料尚包括赤黑鼠耳蝠、長尾鼠耳蝠、隱姬管鼻蝠等亦會經常使用某些棲地與處所 而被重複捕捉。這些現象顯示出蝙蝠對特定棲息地具有相當高的忠誠度 (fidelity)。
蘇花改工程會影響蝙蝠嗎?
由 8 個年度 (2012-2019) 的調查結果顯示,以年間蝙蝠組成而言尚稱穩定,雖然蘇花改不同路段的工程施工時程有別,而不同蝙蝠物種對於棲地工程干擾的反應也可能不一。蘇澳~東澳路段(本計畫北段)共計發現 5 科 10 屬 18 種蝙蝠,南澳~和平路段(中段)5 科 14 屬 22 種蝙蝠,而在和中~大清水路段(南段)則發現 5 科 10 屬 18 種蝙蝠,中段樣區內記錄的種類較多,主要差異為捕捉到一些主要分布於中高海拔山區的物種,如東方寬耳蝠、寬吻鼠耳蝠、毛翼管鼻蝠及金芒管鼻蝠等。
此外,由調查資料較多者之堀川氏棕蝠、長趾鼠耳蝠及山家蝠(視為指標物種)的 監測趨勢顯示,長期而言不同年間物種組成的差異 雖然不明顯,但在短期只要樣區環境發生突然的變化,如工程施作、棲地破壞(如林木大量砍除)、環境汙染(如除草劑或農藥噴灑),或每年的夏、秋季颱風來襲,常會立即反映在蝙蝠類群的調查結果(數量)上。
因此,我們認為天災為自然現象,但人為的工程施作則應儘量縮小範圍,並避免非必要的植被移 除或破壞,因為森林型棲息地對某些蝙蝠(如臺灣管鼻蝠、隱姬管鼻蝠及玄彩蝠等)至關重要,一旦破壞則會嚴重影響其族群存續。事實上,每個物種對生態系都有牠們重要的功能,我們會在工程完成通車後持續瞭解蝙蝠利用棲地與棲所的狀況,咸信對物種的生活史及生態習性更為瞭解後,將可避免或降低人為工程施作對生物的干擾與傷害,以維持當地生物多樣性的豐富,達到與生態保育雙贏的局面。
後記
本文描述的年度主要為 2012 至 2019 年的調查結果,然而今 (2020) 年仲夏 7 月間研究人員特別在南澳至和平間新選一處樣點,利用網具進行捕捉調查,結果一夜間總計捕獲了 32 隻蝙蝠,其中還包括歷年只有超音波音頻資料的黃頸蝠,捕獲數量竟有 14 隻之多,同時亦捕獲 1 隻華南水鼠耳蝠,為本區域的新紀錄種,令人意外又驚喜。
這種結果除了直接證實以往僅利用音頻辨識發現的黃頸蝠的確存在蘇花公路沿線環境中外,更使得本計畫在蘇花公路沿線多年的蝙蝠調查紀錄(22 種)再添 1 種而達 5 科 14 屬 23 種,占臺灣本島食蟲性蝙蝠物種數之 72%,顯 示自然環境豐富而多樣的蘇花公路沿線所孕育的蝙蝠資源確實是多樣而特殊,值得我們持續瞭解並積極保育。

































-200x200.jpg)









{kind=link}