


- 本文轉載自科技大觀園,原文為《好奇不設限,屎尿皆可探——搞笑諾貝爾獎得主楊佩良專訪》
- 作者/科技大觀園特約編輯|曹盛威
與胡立德教授(David Hu)團隊一同進行研究的楊佩良博士,曾以「尿尿時間是 21 秒」與「袋熊大便是方形」,兩次登上搞笑諾貝爾獎頒獎典禮。問起她是不是為了搞笑諾貝爾獎,刻意以「屎尿」作為研究主題,她只淡淡說了一句:「從頭到尾想都沒想過!」又追問她為什麼要做這些研究,楊佩良博士笑著說:「你不覺得這很有趣嗎?」
立定志向的演講
談起自己為何會開始生物力學的相關研究,楊佩良想起了大學時期聽到的一場演講,這場演講正是胡立德教授的研究分享,主題是「蛇的爬行方式」。
「如果光靠蠕動,蛇是不能前進的,還要靠鱗片的立放才能順利前進!」楊佩良說胡教授的分享為她的人生開啟了另一扇門,回想過去,小學時很喜歡看故事書,以為自己會當個作家,中學時則愛上了生物,到了高中又對物理與數學產生興趣,每個階段愛的都不同,「我愛的是生物加上力學,聽到兩者可以二合一的時候,有個念頭從我腦中一閃而過。」至於當時聽完胡立德的演講後有何感想,楊佩良說:
「很難的數學,很鬧的結果。」這就是楊佩良踏入科學研究的契機。
勇於面對質疑
在楊佩良求學過程中,其實也跟家人有過衝突,她說:「當然有阿!最常被問到的就是念了這個有什麼用?尤其我的博士論文(尿尿時間 21 秒)超怪的。不過畢竟是個博士,而且還是個不錯的博士(機械博士)。」
不只是家人有衝突,許多大眾在過去也很不諒解他的研究,「在還沒得獎(搞笑諾貝爾獎)之前,許多人聽到我的研究都是毀譽參半。」楊佩良分享之前接受美國媒體採訪的經驗,採訪的主題正是她的博士論文,當採訪上傳到 Youtube之後,like 跟 dislike 數是差不多的。
「不過在得獎(搞笑諾貝爾獎)之後,這些事情就沒發生過了。」楊佩良笑著說,也對搞笑諾貝爾獎傳播科學的能力感到驚訝,「以前都會說我們是不務正業、浪費資源,現在都說我們是有『玩心』的科學家。」
研究尿尿的契機
說起研究尿尿的原因,楊佩良分享了胡立德教授的生活故事。放假時,胡教授在家裡帶小孩,閒著無聊就開始觀察起小孩,發現小孩上廁所花的時間跟自己差不多,這個現象引起了胡教授的注意。
「我小孩跟我體型差這麼多,他的尿才那麼一點點,怎麼尿尿的時間會跟我差不多?」接著胡教授又跑去觀察他們家養的狗,發現尿尿的時間也跟自己差不多。

「那時候我剛進(胡立德的)實驗室,然後我自己不是那麼喜歡坐在辦公室,所以我那時候跟他(胡立德)說,只要你讓我去動物園,我什麼都願意。」後來,胡教授便把研究尿尿的重責大任交給楊佩良,說:「那你去幫我調查全世界最大的(陸上哺乳類)動物,尿尿的時間是不是也差不多。」
尿尿觀測小組
為此,楊佩良與另外兩位學生組成了「尿尿觀測小組」,他們先是在網路上搜尋大象(最大的陸上哺乳類)的尿尿影片,也去附近的動物園駐點觀測動物尿尿,此外,也跟動物園協商某些動物是否能近距離觀察或採集尿液。
楊佩良提到動物園的動物,生活作息其實非常規律,有經驗的飼育員甚至能精準告訴你哪隻動物現在要準備尿尿,這讓數據蒐集與採樣變得簡單,但也有非常難搞的,像是動物收容中心裡的流浪狗。
「如果站在狗的後面,他們會直接跑掉。」這些流浪狗對人的警戒心很高,最後他們用了寵物尿墊蒐集尿液,以前後重量差異的方式來估算尿液的重量。
NHK 再次驗證
研究發表後,不少人寄信給楊佩良,說這研究的誤差值太大(誤差值為正負 13 秒,平均尿尿時間也才 21 秒)或是自己尿尿的時間根本不是 21 秒,楊佩良解釋:「這可是 5 公斤到 5000 公斤的動物的數據,所以我想這應該是一個很小的離峰值。」此外,其他需要考慮的變數也很多,像是每個人對於「想尿尿」的感覺不同,有人可能膀胱還沒滿就跑廁所了。
「由於太多人問人類相關的問題,日本 NHK 就找我們,還協調了一位日本的泌尿科醫師來做這件事(測量人類小便的時間)。」在節目中,泌尿科醫生在車站外面招募參與者,請他們去上廁所並用碼錶記下自己上廁所的時間,最後收集了約有兩千位參與者的尿尿數據。
「平均起來大概是 20.5 秒吧。」這個數值十分接近楊佩良的研究結果,在分享這個數據的同時,楊佩良也鬆了一口氣,「其實我一直很怕自己做的東西無法適用在人類身上,雖然我的模型理論上是 21 秒,但我沒有(人類的)數據可以支持。」
古老的問題:袋熊便便是方的
「在沒看到樣品之前,我一直認為這是假的。」楊佩良博士如此說道。在澳洲,「袋熊便便是方的」如常識般流傳在民間,一般人認為這是因為袋熊肛門是方的,才讓便便變成方的。

「為此,我們聯絡了澳洲當地的袋熊專家(Scott Carver),他跟當地政府配合處理路殺袋熊。」Scott 告訴楊佩良,在解剖袋熊屍體時,就能看到袋熊的腸道中有方形便便,Scott 把樣本寄到美國,楊佩良這才確認了袋熊便便真的是方的。後來,楊佩良也針對活體袋熊做了 CT 斷層掃描,發現袋熊的肛門形狀是圓的,肛門是方的說法也就不攻自破了。
這些現象直指袋熊「便便是方形」的秘密就在腸道中。在解剖路殺袋熊後發現,這些便便要到腸道末端才逐漸變硬、變方,而要形成我們所見到的方塊便便,則大約是到了腸道末端 8% 左右的地方才能見到。
方形便便的力學分析
會有這個現象主要原因,是袋熊的腸道肌肉發育不平均,如下圖 (a) 所示,紅色處代表肌肉較薄,較容易變形的區域,藍色則是肌肉較厚,較不易變形的區域。

我們可以把袋熊腸道的截面模型,當作兩種不同的彈簧組合在一起,紅色的部分是容易被拉開的彈簧,藍色的部分是不容易被拉開的彈簧。為了維持力平衡,各處彈簧連接處的受力必須相等,拉開角度與伸長量的分析方法如 (b) 所示。
腸道蠕動的過程則可以簡單理解為有外力壓縮腸道,由於兩種彈簧受外力後的伸長量不同,因此腸道無法繼續維持圓形,最終形成類似橢圓形的形狀(如圖中 (c)、(d)、(e) 所示)。不過,這個模型是沒有便便在腸道中的模型,也沒有考慮腸道中兩種不同彈簧的受力伸長量(原文為 Stiffness,剛度)的差異,把這兩個變數考慮進去後,形狀就會接近正方形了!
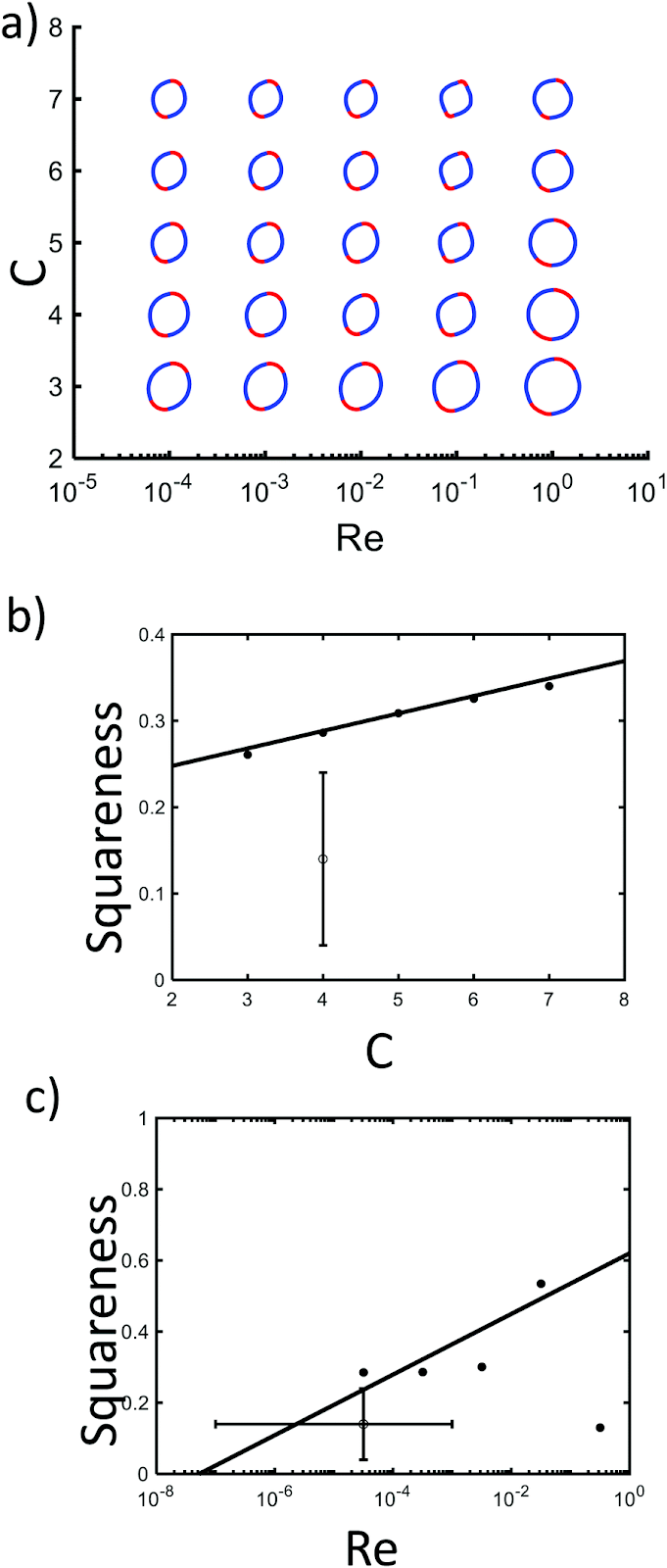
(b) 腸道的剛度比(C)越高,糞便越接近正方形(Squarenss),
(c) 糞便的雷諾數(Re)越高,糞便越接近正方形(Squarenss)
圖/參考文獻 1
註解:剛度比(C),數值越大表示腸道軟與硬的部分剛度差異越大;雷諾數(Re),數值越大表示流體慣性力越強,流體無法朝同一方向移動,此狀況下可簡單理解為糞便越乾越硬,不是稀稀水水的。
簡言之,如果腸道的肌肉分布越不均勻(腸道軟與硬的部分差異越大),以及糞便越乾,就越容易形成方形便便!這也說明了為什麼袋熊便便只會在腸道的最末端變成方形,除了多次擠壓之外,這時的便便也比較乾燥。
至於我們有沒有可能大出不同形狀的花俏便便呢?楊佩良則分享了一位腸胃科醫師的意見:「大腸癌的初期的患者,其實就是大腸的某個角落開始硬化,因此有可能大出來的大便形狀會不太一樣。」下次大便的時後,記得多看一眼便便形狀,搞不好能及早發現大腸的病變!

為了好奇心,學會名為「科學」的工具
「澳洲人很早以前就知道袋熊便便是方的,為什麼會等到我來做研究呢?」楊佩良的話令我們沉默,對楊佩良來說,數學或物理並不是課本中會考的知識,而是解決問題的「工具」。
也許澳洲人很早就發現了這個問題,也很想解開這個謎題,但這些想解開謎題的人,並沒有相稱的「工具」可以解謎,「澳洲袋熊專家(Scott)就是其中之一,因此當我告訴他想要研究這個問題的時候,他非常大方地提供各種幫助。」

「如果不是為了好奇心,手腳就會動得慢!」楊佩良認為自己學習的動力就是好奇,只要真的想做,總會有方法解決。她分享自己在大學時遇到的外文與物理雙主修的學姊,雖然數學是個門檻,但學姊最後還是完成了雙主修。
「算了一下,這位學姊在大學時花在物理跟數學的總時數,絕對超過我們花在高中的總時數。」楊佩良認為並沒有命定論這回事,再次回憶起自己過去的學習歷程,都是順著自己的心意,認真想要回答自己遇到的問題,才會到處學各種新的事物。
為了不抹滅學生的好奇心,楊佩良在自己的流體力學課上,要學生針對自己有興趣的現象,做出「流體可視化」當作期末報告,她說:「只要拍出來我就給過。」
楊佩良分享了幾位學生的題目,一位游泳隊的學生好奇為什麼自己在學校的泳池游泳比較快,錄下了在不同泳池游泳時的水流狀況,足球隊的學生則拍下了逆風與順風射門時的差異,而另一位沒有社團活動的學生,則拍下了無葉風扇的氣流是怎麼流的。
「生活中其實有很多流體力學。」像是香菸的軌跡,或是蛋白打發,都是流體力學的守備範圍。雖然深入分析需要流體力學與工程數學的協助,但「流體可視化」只要花點巧思,就能看見流體現象、比較差異,而這種回饋感,正是好奇心的來源,有足夠的好奇心,補齊「工具」也不會是難事。
無用的傳承與啟發
談起研究應用,楊佩良說:「有用的東西,是建立在無法運用的基礎上,傳承後的結果。」也分享近三年內,關於尿尿研究的後續研究成果,包含了智慧馬桶與導尿管的設計,「這些研究是我一開始沒有想到的,但如果沒有我的研究,他們也不會想到。」
未來,楊佩良也將繼續投入更多有趣(但可能無用)的研究題目上,像是鳥類(候鳥)群聚飛行時,為什麼不會有豬隊友讓他們撞在一起?而胡立德教授的團隊也持續研究各種有趣的現象,像是一大群蛆如何每隻都能吃到食物,或是動物舌頭的相關後續研究。
參考資料
- Yang, P. J., Lee, A. B., Chan, M., Kowalski, M., Qiu, K., Waid, C., … & Hu, D. L. (2021). Intestines of non-uniform stiffness mold the corners of wombat feces. Soft Matter, 17(3), 475-488.
- Yang, P. J., Pham, J., Choo, J., & Hu, D. L. (2014). Duration of urination does not change with body size. Proceedings of the National Academy of Sciences, 111(33), 11932-11937.







































{kind=link}
{kind=link}