

作業期限在星期四晚上的 23:59,今天才星期一,還早啦。
咦!突然就星期三了,好像該來做作業了,可是好像還是沒有靈感,不如等睡醒之後再來做吧。
糟糕了,剩下兩小時,靈感該來了吧⋯⋯
最後終於趕在時限前完成,一天又平安的過去了,感謝飛天小女警的努力(?)不是啊,這樣的生活也太辛苦了吧!
對於該完成的事情,我們本來就會有先後順序的調配與取捨,但倘若一味推延應該要完成的正事時,便會形成「拖延行為」。
以下這些拖延行為,你有覺得很熟悉嗎(中箭):
- 同時接下太多任務,無法一次完成而導致拖延
- 以為自己還有時間,晚一點再做也沒關係,結果到截止前才開始動工
- 當其他更有趣的事情出現,就會先放下手邊的事,結果忘記自己還在進行的任務
- 對於有壓力的事,能拖就拖,寧可一直拖延來逃避,就像是⋯⋯文章就是寫不出來啊啊啊啊啊QAQ
拖延行為對大家的生活造成許多不便,像是在小組報告遇見會拖延的雷隊友,真的會覺得很崩潰。既然拖延行為這麼讓人討厭,我們到底該如何解決呢?要解決拖延行為太困難了,不如解決產生拖延行為的人吧!(不可以啊!)

2014 年曾有研究在探討「拖延是衝動的演化副產物」——研究指出拖延、衝動皆與成功追求和權衡目標的能力有關,也可以這麼解釋:當我們被衝動驅使追逐眼前利益時,我們很容易就放棄了那些遠期目標,於是就開始拖延了。
而除了演化上的因素,造就拖延的心理也可能來自其他原因,就讓我們娓娓道來吧。
追求完美反而裹足不前?
讀者們在看到完美主義時,或許會覺得這個原因很奇怪、很難把拖延行為連結到完美主義。可能有人會想說:既然都是完美主義了,怎麼還會拖延呢?
如果帶著追求完美與精準確實的心態將事務完成,結果通常挺不錯的,但是這些「完美」是怎麼來的呢?「完美」的評語通常來自於他人眼光與自我評價,而追求完美者的糾結點在於:要不就做到最好,要不就不要做,可是要做到毫無缺點是不可能的,所以乾脆不要做吧?(不行!)
在完美的眼光下掙扎、被所謂的十全十美綁架,什麼都不去做,就只會停滯在原點,試著往前踏出一步,雖然過程不是那麼容易、前行的步伐不大,但是里程數也漸漸在累積了。

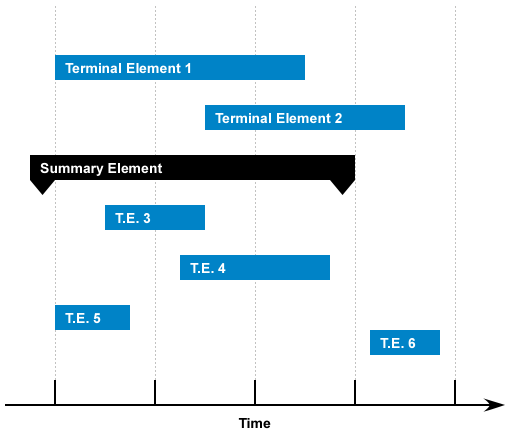
把時間視覺化,讓時間的感覺具體化
在時間管理上,我們很可能遇到以下兩種問題:一是不知道要抓多久的時間,以為自己只要花 3 個小時就能完成的任務,實際上卻要花了 5 小時才完成;另一是不知道截止時間已近在眼前,有時候拖延一下,不小心就只剩下 2 小時了,這時候才開始緊張就來不及了呀!
這些問題反映出我們對於規劃自己的時間其實並不熟悉,那麼,這該怎麼解決呢?可以嘗試提前預估自己完成任務所需的時間,一方面可以控管自己的效率,同時了解自己到底需要花多少時間才能完成任務。除此之外,同時將計畫視覺化、物象化(例如使用行事曆做紀錄)也能夠將時間呈現眼前,進而讓自己知道所剩時間其實並不如想像中多。
任務太大塊、無法一口吃,那就多切幾刀慢慢吃
接下的任務範圍過大、不知道該從何開始時,可能也會讓我們卻步、逃避,總是要在時間逼近時才要動作,偏偏這時再來後悔就來不及了。那麼,不如分割這些壓力吧。就像在夜市買了好多好吃的小吃,很想要馬上吃下肚裡,但我們的嘴也就這麼大的空間,總不可能一口吞下吧。
而我們的任務也是這樣,就像筆者在寫這篇文章的時侯,不知該要從何寫起,就先分段列出各個想告訴讀者的細項,再逐一擊破,文章就生出來了唷!(嗚嗚⋯⋯是感動的淚水)
前段提到將計畫視覺化、物象化,除了能夠將時間呈現眼前之外,任務一一被列出時,還能對自己規劃的任務做複習與整合,同時幫助記憶、知道自己該做哪些事情。不過到底是手寫行事曆好,還是用 APP 記錄比較好呢?無論使用哪種媒介進行記錄,重要的還是整合與複習,才能夠記下自己當下應該要完成的事。

大家都會拖,但怎麼面對很重要
還有些人之所以想要拖延,是因為覺得拖到最後一刻比較有靈感,總要到期限之前才會靈感大爆發。面對期限的恐懼、緊張很有可能讓腎上腺素爆發,但是,實際上是否真能做得比較好也不一定,因為最後的成果也只是當下能完成的「最好」,不見得是我們真正能做到的「最好」。除此之外,就像上面提到的完美主義,從另一個角度來看,當拖延到最後一刻才開始動工完成,拖延者可能就更有理由解釋自己做得不夠完美是來自於時間不夠充分。
所以在面對自己拖延行為時,儘管逃避雖然可恥但是有用(?),不過只是一味因為焦慮而想要逃避,讓自己的狀態停滯不前,就完全不會有所改變,真的想要解決焦慮,不如勇於嘗試,真正實踐的時候也就不會那麼困難了。

你是不是也總在拖延與後悔中掙扎呢?與其花時間思考該如何合理化自己的拖延行為,不如試試往前踏出一步。在我們學會走路之前,也一定經歷過跌跌撞撞,就連現在學會走路了都還是有可能會摔倒,沒有人不跌倒,但如何面對自己的跌倒才是更重要的,也可以造樣造句:
沒有人不拖延,但如何面對自己的拖延才是更重要的!
參考資料
- 《手寫?打字?兩種筆記方式的比較》——哇賽心理學
- 拖延是衝動的演化副產物




































{kind=link}