- 【科科愛看書】一直以來人們都渴望飛翔的滋味,但是,難道發明了飛機就能讓大家隨心所欲亂亂飛嗎?密如蜘蛛網的全球航線究竟是如何設計的?那麼多的飛機要怎樣才不會撞在一起?為什麼起降時要特別小心翼翼?快來一窺《飛航管制的祕密世界》,讓你知道空中飛人背後的團隊有多厲害!
完美掌握四個維度,飛機會聽話嗎?
艾姆斯研究中心有些研究員有自用飛機的駕駛執照,史帝夫.格林博士(Dr. Steve Green)就是其中一位。
史帝夫年紀與哈利相當,是年約五十的權威學者。1996 年時,他與哈利一起參與將 TMA 導入達拉斯/沃斯堡國際機場的計畫。做為專事飛航管制科學的研究領域創設初始成員之一,他深得海因茲的信賴。像是要表現他的姓氏「Green」一樣,史帝夫總是穿著招牌綠色襯衫。最初跟他搭話時,我的開場白便是:「不愧是格林先生,很適合綠色!」
2008 年,我和史帝夫在一場於西班牙塞維亞舉行的國際會議中相遇。會議的主題是在國際民航組織計畫於 2030 年正式投入使用的航機上,推行「四維航跡操作」(4-dimensional trajectory-based operation, 4DTBO)可能遇到的課題。

四維航跡是以時間(速度)、緯度、經度、高度四個維度所定義的航跡,四維航跡操作則是指操作航機沿航行效率良好的航跡飛行。航機依機種和風向等條件,存在可使燃料消耗量降至最低的「最適」四維航跡。航機從機場出發直到抵達目的地機場為止,如果引導航機沿航行成本最低、維持準點抵達的四維航跡飛行,將是理想的飛航管理,但在實際運用之前仍有幾個需探討的課題。
課題之一是航機能否沿四維航跡飛行。要達成理想的航行,必須由機師等航空公司相關人員與管制員等飛航管制服務的提供者共同協商出四維航跡。然而,航機飛行中遇到天氣變化等情況,不得不變更原先規劃好的航跡。此時,駕駛艙內的電腦與地面的管制中心,兩者如何在分隔空地兩端的情況下,分享新的四維航跡資訊呢?縱使能利用新的數據鏈路通訊,問題又回到目前的航機有辦法沿規定的四維航跡飛行嗎?
只差了一度,飛機就飛走啦!
其實,我有個無論如何都想請教史帝夫的問題,所以常有意無意路過他的辦公室,但他好像很忙,不容易遇到。史帝夫的研究夥伴吉伯特(Gilbert)來向我搭話,我說明自己有事請教史帝夫。他告訴我說史帝夫最近異常忙碌,連他都很少見到,如果願意的話,可以先跟他商量。我想請教史帝夫的問題是:
「目前的航機有辦法遵循外部規定的下降路徑,持續下降直到降落跑道嗎?」
簡單舉個例子,航機從開始下降能夠保持三度的下降角度持續下降嗎,諸如此類的問題。理論上雖然可行,利用數學模型在電腦中建構的虛擬航機模擬可如此飛行,但實際上機師能否如實操作是另一回事,原因是機師在各自駕駛艙內所操作的機器規格不盡相同。這讓我們日復一日深陷在這樣棘手的問題中煩惱不已。
「嗯~我以前做過實驗,搭載在塞斯納飛機上的 FMS(Flight Management System,飛航管理系統)中,設有讓機師輸入下降角度的功能。也聽過波音 787 上的 FMS,具有讓機師輸入下降角度的功能。但波音 777、737 的 FMS 有沒有這樣的功能就不清楚了。」吉伯特歪著腦袋說。FMS 是統合掌控航機飛行的電腦等的系統,正是所謂高科技航空器的頭腦。
「就是這樣呢。有沒有辦法從外部在 FMS 中輸入下降角度,也會影響未來的管制操作吧。」我學他歪著腦袋回應。
我的問題源自於,設想為實際運用能源效率佳的下降方式 CDO,固定下降角度是否可行。航機一旦開始下降即採 CDO,而不採水平飛行;然而,如果套用在高運量空域則會產生問題,因為依航機種類不同,燃料消耗效率最佳的 CDO 的下降角度也有差異。
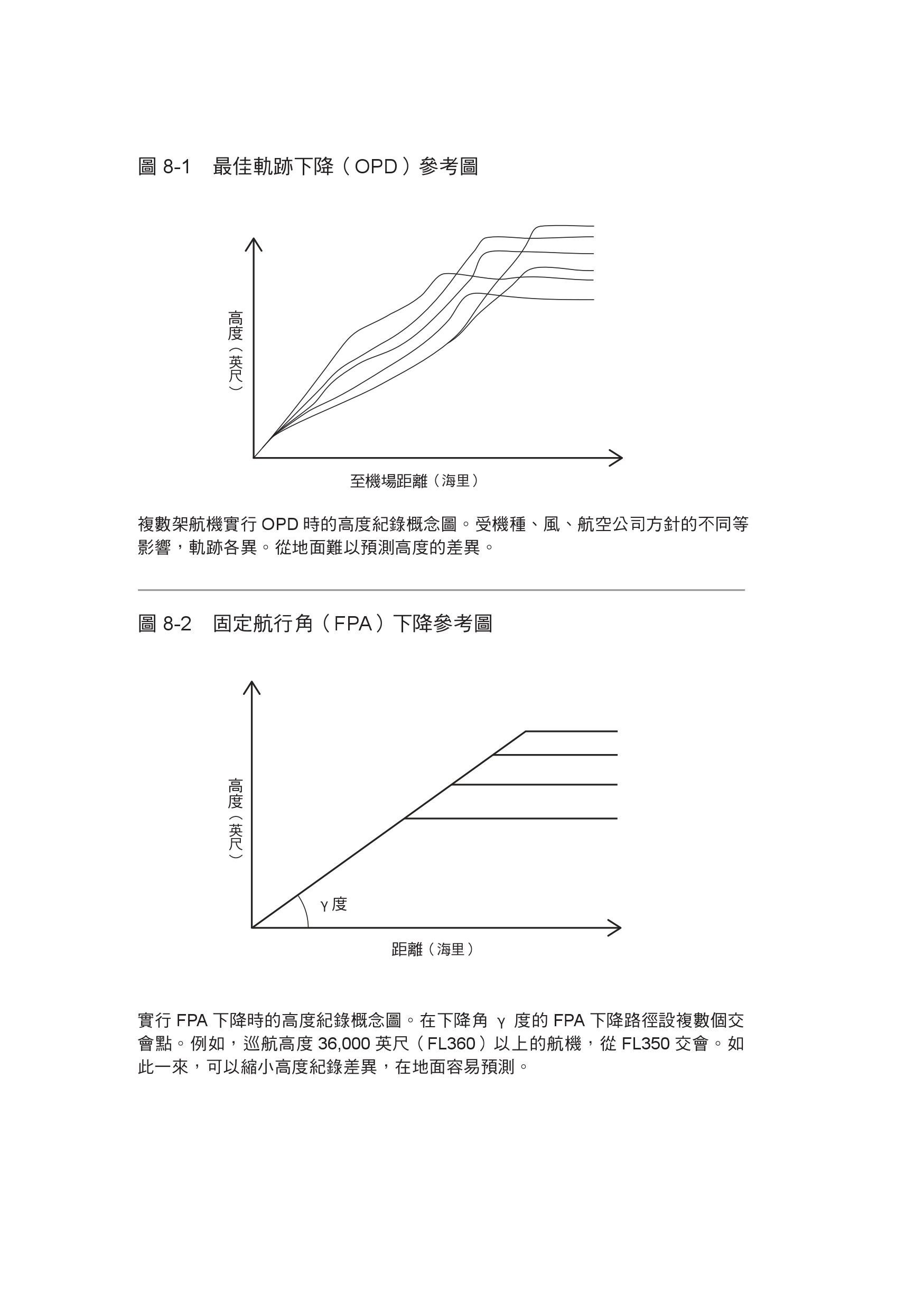
在下圖 8-1 中,試著並列數架航機的 OPD(optimized profile descent,最佳軌跡下降)垂直路徑。雖然同時會受到風速和風向影響,但如波音 777 的下降角度多設在 2.5 度上下,就算最大也約莫是 3.5 度。升阻比(lift-drag ratio)優於波音 777 的波音 787,下降角度通常較平緩。升阻比是升力與阻力的比值,數值越大表示飛機越容易起飛。
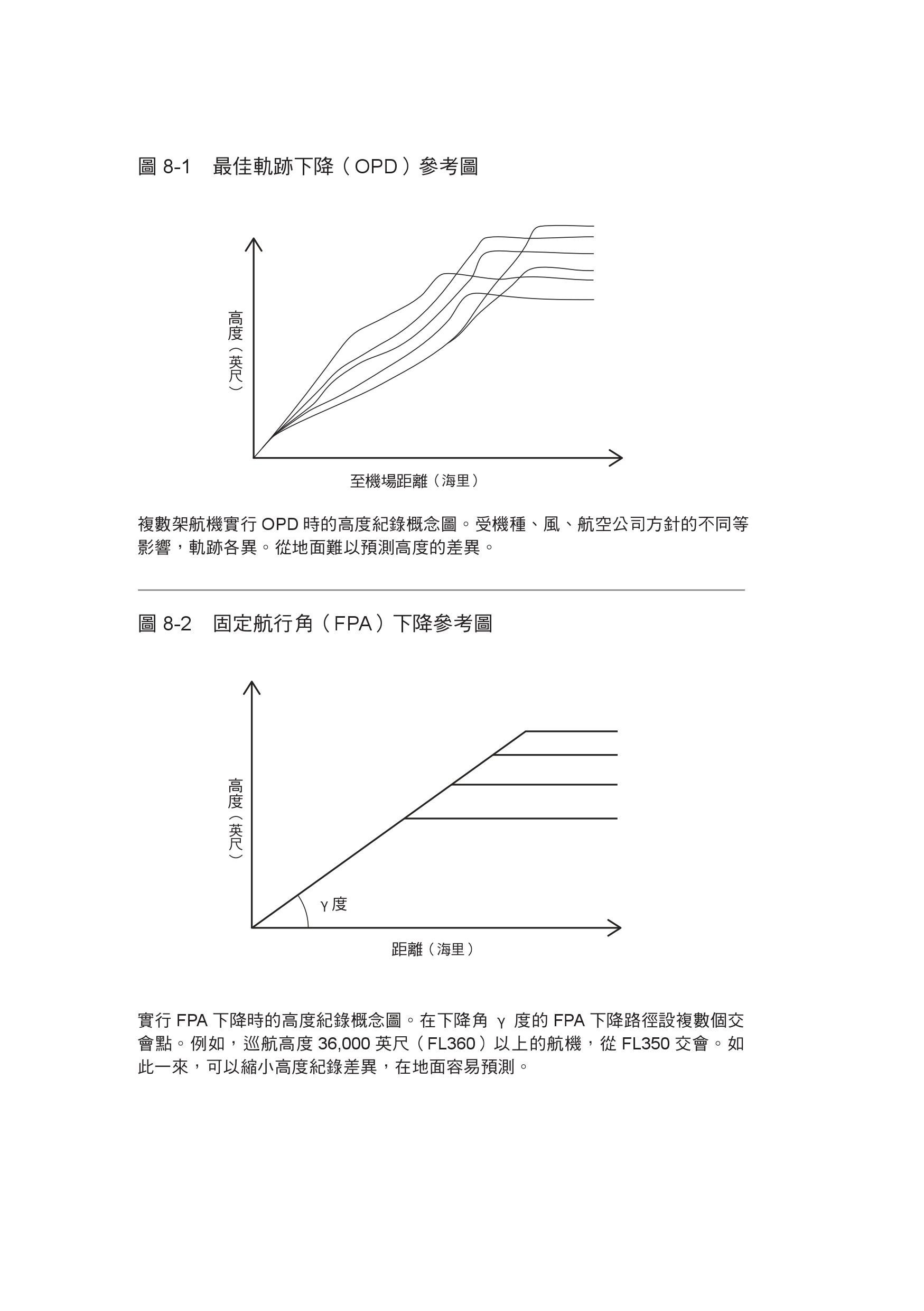
雖然多數人可能會想,不過就是一度之差。實際上,一度之差確實會造成懸殊的結果。例如,當航機自 4 萬英尺處開始下降,下降角度設為 2 度或 3 度,這一度之差,會讓從下降開始的飛行距離差距約 63 海里(約 117 公里)。
假如因為個別航機的航跡各異而連帶使得預測困難的話,管制員很可能為了確保安全,指示過於寬鬆的航機間隔距離,最終將縮減空域和跑道的容量,使得高運量空域無法付諸實現。
我的想法是如圖8-2,事先規劃指定下降角度的路徑,在確保準時抵達下控制速度沿該路徑飛行,如此一來,既讓管制員得以預測航機的四維航跡,某種程度亦促使航機以較佳的能源效率下降。雖然自認為這是不錯的概念,但實際上自動駕駛的飛機是否真能沿指定下降角度的四維航跡飛行卻不得而知。拜訪對航機自動化系統 FMS 的機制知之甚詳的史帝夫,正是想問他這個問題。
固定航行角,讓下降更順利
「原來是這樣啊⋯⋯目前的航行中並未使用像這樣的固定航行角下降(fixed-flight path angle (FPA) descent)。的確,比起航空公司的機師,史帝夫或許知道得更多。」他接著說,他也對我的概念感興趣,想加入我們的討論,並承諾遇到史帝夫時會幫忙促成會面。
幾個月後,我幾乎忘記這件事時,史帝夫造訪了我的辦公室。 「聽說妳一直在找我。之前實在太忙了,雖然已經過了好一段時間,我這星期五的下午空著,如果妳有空的話,來我辦公室討論吧。」他說道。 週五午後,吉伯特和我一同前往了史帝夫的辦公室。
史帝夫認真聽我們說話,一邊翻閱起波音公司的操作手冊。 「我查了下波音 777、737 上的 FMS 的設計,妳的想法是有可能實現的。但因為 FMS 不具有直接輸入下降角度的功能,必須由機師從座艙顯示器(cockpit display unit, CDU)設定並輸入假定航點(waypoint)和設定高度。」

座艙顯示器是搭載在機長與副機長間的顯示器,機師可在顯示器輸入航點的位置和高度等,讓 FMS 記憶飛行路徑。開始下降後旋即經過的地點,由機師設定為假設航點並輸入顯示器,也就是以設定高度的方式讓航機自假設航點開始持續下降飛行。因為高度會反映在下降角度上,從開始下降的航點直到降落為止,設定航機途經的航點高度,等同於設定下降角度。
「這麼說來,機師的確能夠事先在飛行路徑上設定新的航點。可以在設定時將高度一併輸入 FMS。」如此一來,自動駕駛能更新成新的飛行路徑。
「下降路徑是以直線連結每一航點的設定高度。在這樣的設定下,自動駕駛沿下降路徑引導航機飛行。」 史帝夫繼續說著,一邊開始在報告紙上振筆疾書。 「其實,我以前曾經想找個時間,在大型飛機上驗證固定下降角度的 CDO(FPA下降),只是礙於沒有時間。」他說完後,繼續在紙上寫著。
「像是這樣,替巡航高度不同的航機,設定高度相異的閘口。FL360 以上的航機,從 FL350 進入 FPA 下降的路徑。只要提供幾個可供選擇的下降角度,就能配合風向及各機種的性能。順風較強的時候,降低下降角度。」〔譯注:FL為flight level(飛航空層)的縮寫,由一標準大氣壓所推算出的飛行高度,FL360(飛航空層360)代表 3 萬 6 千英尺〕史帝夫撕下那頁他手寫的備忘錄,朝我遞過來。
「能夠在航空公司的飛行模擬器上實驗就好了。妳有機會的話,請去驗證看看吧。」
我向史帝夫表示謝意,說著會把這當做未來的研究方向之一。正當我打算離開的時候,史帝夫微笑著對我說:「抱歉讓妳等這麼久。」
帶著備忘錄,再次起飛吧!
隔天,我一如往常在住家附近慢跑後回到家中,同住的 NASA 同事一臉嚴肅地等在餐廳。
「就在剛剛接獲通知,史帝夫.格林過世了。」
我不敢相信,我們昨天才在一起討論而已。那天夜裡,我盯著史帝夫給我的備忘錄茫然不已。
週末過後的星期一,研究領域主任請我一起來到聚集史帝夫同事的會議室。「正如大家接到的通知,我們敬愛的史帝夫.格林驟逝。實在令人深感遺憾,讓我們一起來說說關於他的事,以追悼懷念他。」主任起頭說道。艾姆斯研究中心的同伴紛紛分享有關史帝夫的故事。待同事寬厚且深得大家信賴的史帝夫是何其出色的那些話語,讓溫暖的氛圍滿溢會議室。
正當我準備起身離席時,主任來到我的面前。「妳和吉伯特及史帝夫的討論,就這麼變成他最後一件工作。我想你們可能很震驚,心情如果無法平復的話,請找艾姆斯研究中心專屬的醫生談談,他可以幫你們做心理諮商。」
約兩週後的某天,我來到吉伯特的辦公室探看,看到他一如往常坐在桌前的樣子,總算感到安心。「嗨,吉伯特。」打過招呼後,他落寞地述說自己仍處於混亂狀態。面對同事的英年早逝,確實使人難受,何況是長年共處同一研究團隊的人,益發令人悲慟難耐。
「吉伯特,我想再跟你商量一件事。史帝夫留給我的備忘錄,我該怎麼處理呢?感覺好像被託付了研究課題一樣。」
「那張備忘錄,史帝夫已經交給惠理了,希望妳能慎重對待。」吉伯特聽完,靜靜地回答。
那天晚上,我把已經變成遺言的史帝夫備忘錄,貼在預計帶回日本的研究筆記本上,決心要實際驗證史帝夫留下的想法。雖然他的時間已驟然停止,我的人生仍未止息。
本文摘自《飛航管制的祕密世界:從地面到天空,從管制台到駕駛艙,飛航第一線直擊全紀錄》,臉譜出版。