在開始移動之前,機器人必須先了解「我在那裡(起點)?」接著延伸到「我要去的目標在那裡(終點)?」其中又包含了「目標有多遠(距離)?」、「目標在我的那一個方向(方位角)?」以及「如何移動(路徑規劃)?」測量距離可使用簡易的超音波感測器即可達到一定的效果,或著您可改用高精度的雷射測距儀(Laser range finder)即可取得更精確的距離量測結果。讓機器人了解當下所面對的方向需使用指南針感測器(compass sensor),但現在的智慧型手機都有三軸的姿態感測器(compass sensor),這時候只要將姿態感測器值平放於機器人頂端就可將姿態感測器Z軸軸向變化做為機器人指向參考。
4.之所以使用樂高機器人是因為可透過NXT Direct Command來直接控制機器人動作,樂高機器人支援NXT Direct Command這套特殊的資料傳輸格式,機器人只要接收到正確的格式就能執行對應的動作,例如讀取主機/感測器資訊、控制馬達或強制關閉電源等等。換句話說我們可以不用編寫機器人端程式就能控制機器人!有時候您甚至得為此多學一套程式語言,NXT Direct Command真的為您省下不少功夫。
5.在程式中使用Google Map API需自行申請Key並匯入您的Android專案,詳細申請辦法請參閱本文末相關連結之<如何取得Maps API Key >。
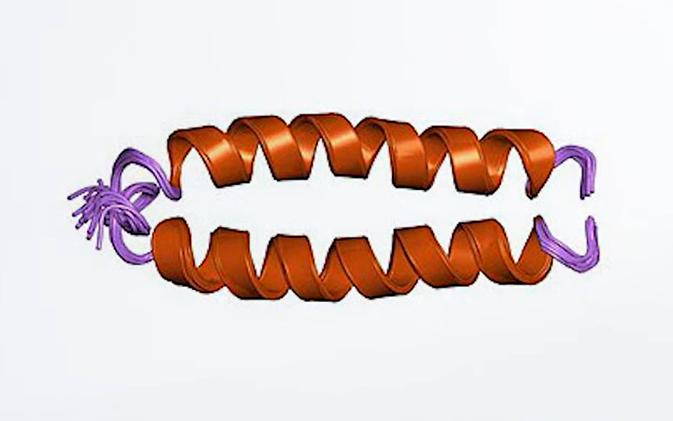
1990 年,融合蛋白 CD4 免疫黏附素(CD4 immunoadhesin)誕生。這項設計,是為了對付令人類聞風喪膽的 HIV 病毒。
-----廣告,請繼續往下閱讀-----
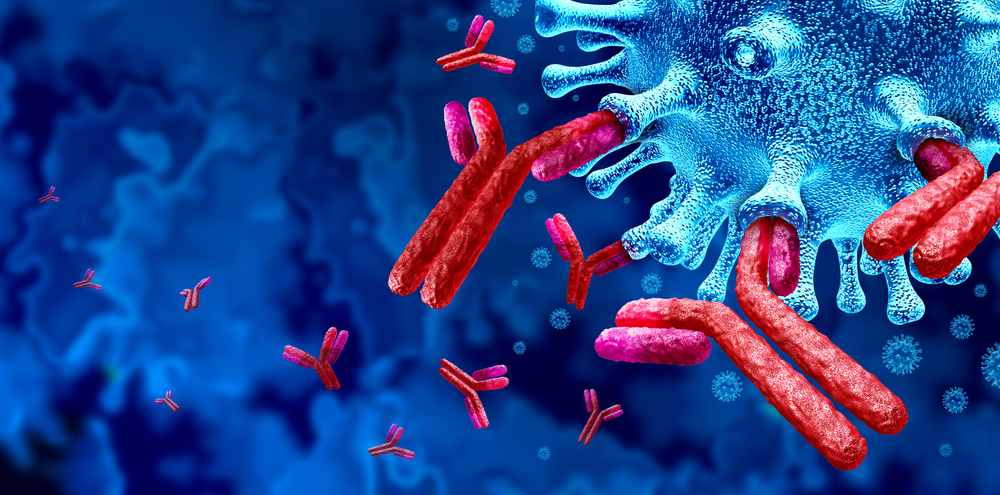
我們知道 T 細胞是人體中一種非常重要的白血球。在這些 T 細胞中,大約有六到七成表面帶有一個叫做「CD4」的輔助受體。CD4 會和另一個受體 TCR 一起合作,幫助 T 細胞辨識其他細胞表面的抗原片段,等於是 T 細胞用來辨認壞人的「探測器」。表面擁有 CD4 受體的淋巴球,就稱為 CD4 淋巴球。
麻煩的來了。 HIV 病毒反將一軍,竟然把 T 細胞的 CD4 探測器,當成了自己辨識獵物的「標記」。沒錯,對 HIV 病毒來說,免疫細胞就是它的獵物。HIV 的表面有一種叫做 gp120 的蛋白,會主動去抓住 T 細胞上的 CD4 受體。
而另一端的 Fc 區域則有兩個重要作用:一是延長融合蛋白在體內的存活時間;二是理論上能掛上「這裡有敵人!」的標籤,這種機制稱為抗體依賴性細胞毒殺(ADCC)或免疫吞噬作用(ADCP)。當免疫細胞的 Fc 受體與 Fc 區域結合,就能促使免疫細胞清除被黏住的病毒顆粒。
不過,這裡有個關鍵細節。
在實際設計中,CD4免疫黏附素的 Fc 片段通常會關閉「吸引免疫細胞」的這個技能。原因是:HIV 專門攻擊的就是免疫細胞本身,許多病毒甚至已經藏在 CD4 細胞裡。若 Fc 區域過於活躍,反而可能引發強烈的發炎反應,甚至讓免疫系統錯把帶有病毒碎片的健康細胞也一併攻擊,這樣副作用太大。因此,CD4 免疫黏附素的 Fc 區域會加入特定突變,讓它只保留延長藥物壽命的功能,而不會與淋巴球的 Fc 受體結合,以避免誘發免疫反應。
從 DNA 藍圖到生物積木:融合蛋白的設計巧思
融合蛋白雖然潛力強大,但要製造出來可一點都不簡單。它並不是用膠水把兩段蛋白質黏在一起就好。「融合」這件事,得從最根本的設計圖,也就是 DNA 序列就開始規劃。
我們體內的大部分蛋白質,都是細胞照著 DNA 上的指令一步步合成的。所以,如果科學家想把蛋白 A 和蛋白 B 接在一起,就得先把這兩段基因找出來,然後再「拼」成一段新的 DNA。
而另一種,那個開冰箱慢吞吞的機器人,雖然看起來笨,卻是在做一件革命性的事:它正在試圖由 AI 驅動,真正開始「理解」這個世界 。它在學習什麼是冰箱、什麼是蘋果、以及如何控制自己的力量才能順利拿起它。這個過程之所以緩慢,正是因為過去驅動它的「大腦」,也就是 AI 晶片的算力還不夠強,無法即時處理與學習現實世界中無窮的變數 。
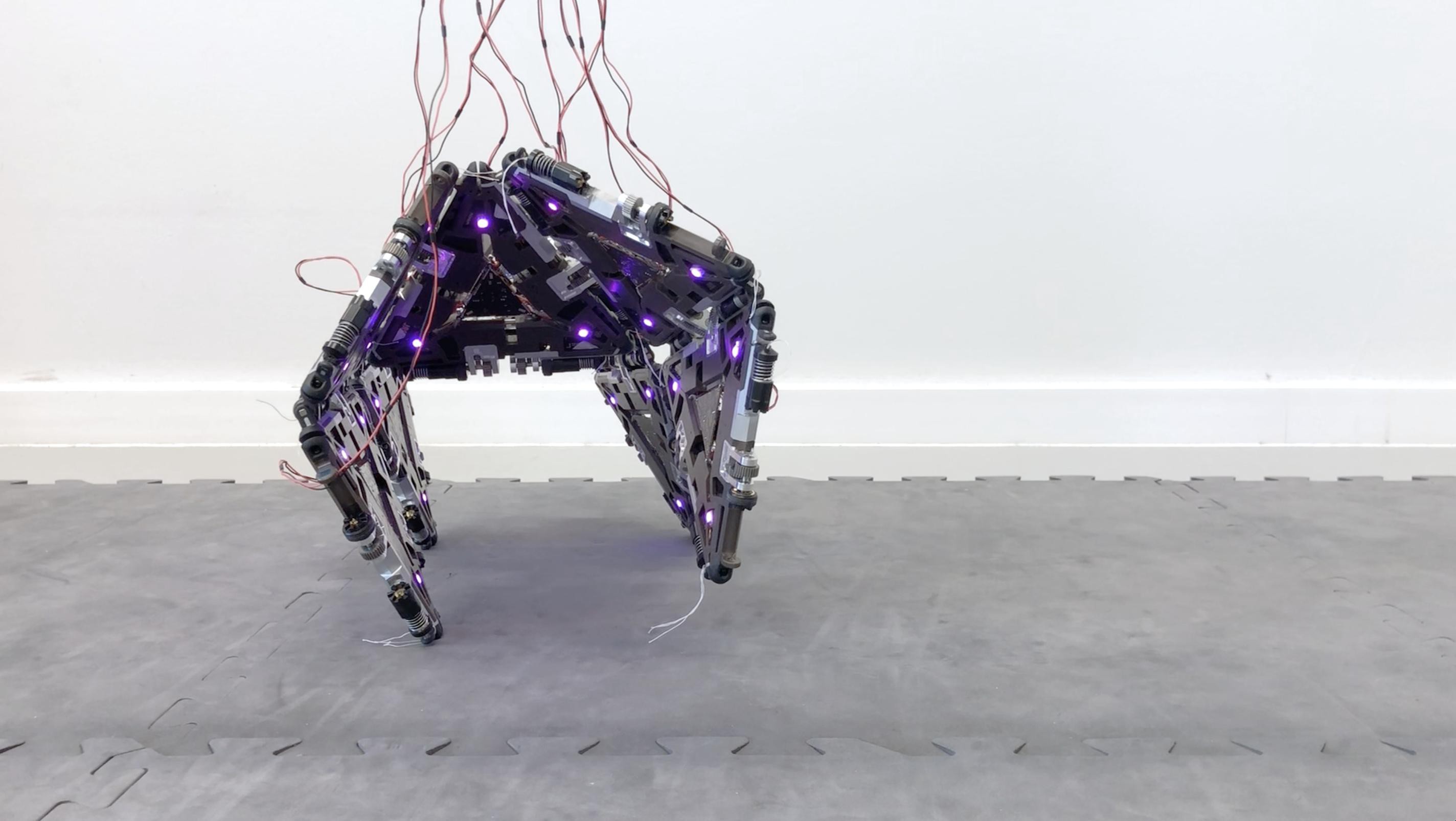
這就是關鍵! 過去以NVIDIA Jetson Orin™作為大腦的機器人,僅能以有限的速度運行VLA模型。而由 VLA 模型驅動,讓 AI 能夠感知、理解並直接與物理世界互動的全新形態,正是「物理 AI」(Physical AI)的開端 。NVIDIA Jetson Thor 的強大算力,就是為了滿足物理 AI 的嚴苛需求而生,要讓機器人擺脫「復健」,迎來真正自主、流暢的行動時代 。
NVIDIA Jetson Thor 的強大算力,就是為了滿足物理 AI 的嚴苛需求而生,要讓機器人擺脫「復健」,迎來真正自主、流暢的行動時代 / 圖片來源:研華科技
其中,物理 AI 強調的 vision to action,就需要研華設計對應的硬體來實現;譬如視覺可能來自於一般相機、深度相機、紅外線相機甚至光達,你的系統就要有對應的介面來整合視覺;你也會需要控制介面去控制馬達伸長手臂或控制夾具拿取物品;你也要有 WIFI、4G 或 5G 來傳輸資料或和別的 AI 溝通,這些都需要具體化到一個系統上,這個系統的集大成就是機器人。
從樓梯的階高、門把的設計,到桌椅的高度,無一不是為了適應人類的雙足、雙手與身高而存在 。對 AI 而言,採用人形的軀體,意味著它能用與我們最相似的視角與方式去感知和學習這個世界,進而最快地理解並融入人類環境 。這背後的邏輯是,與其讓 AI 去適應千奇百怪的非人形設計,不如讓它直接採用這個已經被數千年人類文明「驗證」過的最優解 。
這也區分了「通用型 AI 人形機器人」與「專用型 AI 工業自動化設備」的本質不同 。後者像高度特化的工具,產線上的機械手臂能高效重複鎖螺絲,但它無法處理安裝柔軟水管這種預設外的任務 。而通用型人形機器人的目標,是成為一個「多面手」,它能在廣泛學習後,理解物理世界的運作規律 。理論上,今天它在產線上組裝伺服器,明天就能在廚房裡學會煮菜 。