已經不能沒有「它」?悄悄改變我們生活的「家庭科技」
作者/賴昭正|前清大化學系教授、系主任、所長;合創科學月刊
我們生活在一個高度依賴科學與技術的社會,但幾乎所有的人對科學與技術都一無所知。
——Carl Sagan(1934-1966)美國天文學家、科普作家
在「日常生活範式的轉變:從紙筆到 AI 」一文裡,筆者談到 50 年來的科技發展完全改變了我們自己日常生活的方式,如筆者已經不再用紙筆寫文章、不在圖書館裡找資料、旅行不需要攜帶地圖、在家逛街購物、買股票不需要透過券商下單、與親友及科學月刊通訊都是瞬間達成、⋯⋯等等。最近人工智能的正式登場更可能讓人人成為寫文章高手,讓讀者懷疑這篇文章是不是筆者自己寫的。
除了這些有形的日常生活方式的改變外,事實上還有一些無形、沒有改變我們生活方式的科技正在我們家中發生的。其中最明顯的就是電視, 我們看電視的方法還是一樣, 但年輕的讀者可能不知道不管從軟體或硬體來看, 電視機已經完全不再是 1970 年代的電視機了。我們在這裡就來談談這些偷偷摸摸進入我們家庭生活的三大無形改變吧,免得被名科幻小說及科普作家薩根(Carl Sagan)嘲笑:我們生活在一個高度依賴科學與技術的社會,但幾乎所有的人對科學與技術都一無所知。
電視機 早期的電視機是由真空管及陰極射線管(CRT)組成的,體積膨大。1940 年代,半導體器件的發明使得生產固態電子器件成為可能,它比熱真空管更小、更高效、更可靠、更耐用、更安全、更涼爽、更經濟。從 1960 年代中期開始,熱電子管可以說完全被晶體管取代。然而直到 21 世紀初,陰極射線管(也是一種真空管)仍然是電視監視器和示波器的基礎。
圖/作者提供
1982 年,愛普生(Seiko Epson)發布了第一台用液晶(liquid crystal)當平面顯示器(display)的液晶電視(LCD TV);1984 年,愛普生又發布了第一台全彩袖珍液晶電視。夏普(Sharp)於 1988 年推出第一台商用液晶電視;第一台電漿(plasma)電視於 1997 年出現。電漿電視畫面是透過顯示器上面畫素(Pixel)點發光,不是像液晶電視機在畫面後面照光,因此在畫質方面比液晶顯示器強多了,但因在價格上沒辦法競爭,早已被淘汰掉了,最近被類似的有機發光二極體(organic light emitting diode, LED)電視機取代。
除了硬體外,電視影像訊息的傳播編碼(coding)也大異於前:早期使用類比訊號(analog signal)編碼,現在則使用數字(digital)。後者在其開發時就立即被認為是自 1950 年代彩色電視出現以來,電視技術上之一項創新進步的重大變革。類比廣播到數字廣播的轉變始於 2000 年左右;經過多次及多年的拖延,美國終於於 2009 年 6 月 12 日正式取消無線類比電視廣播,台灣也已於 2012 年 7 月全面廢除無線類比電視廣播,改用數位電視。詳情請參見高畫質數位電視 。
電燈泡 我們一般都將發明燈泡的功勞歸於愛迪生(Thomas Edison),事實上早在他 1879 年申請專利之前,英國發明家就已經知道用弧光燈當燈泡。但愛迪生不但將白熾燈泡商業化,並發明了將電力帶入住家所需的整個系統——發電機、電線、保險絲、燈的開關。1904 年出現了取代碳絲燈泡之更亮的新型鎢絲燈泡,1913 年發現在燈泡內放入氮氣等惰性氣體可以提高壽命,沿用至今。
電燈照明的原理是因為任何溫度不為絕對零度的物體,總是不停地對外放出各種頻率的輻射能(見「科學家如何找到黑體輻射光譜,引發 20 世紀初的量子革命? 」)。不幸的是:這些不同頻率的輻射能中只有非常少的一部分是可見光,因此利用鎢絲加熱來照明的電燈效率非常低(見「電燈的效率」)。
筆者在「太陽能與光電效應 」裡探討了「二極體」(diode)的物理,其用途甚廣(如整流器及控制器等)。它可以透過光來發電製造太陽面板;它也可以透過電來發光——「發光二極體」(light emitting diode, LED)——製造上面提到之有機發光二極體電視機及二極體燈泡。因我們可以用不同材料來控制發出來之輻射在可見光範圍,所以二極體燈泡效率比傳統鎢絲燈泡高得非常多:例如前者只需 18 瓦特就可達到後者 100 瓦特(W)的亮度。加上它不使用高溫,壽命也因之比較長;但因其製造成本高,所以直到最近美國才宣布禁售傳統鎢絲燈泡,強迫使用二極體燈泡1 。
圖/作者提供
發光二極體需要在直流電下運作,一般家用二極體燈泡設計在低電壓 1.2-3.6V 之間。然而,為了變壓方便及減少輸送過程中的能量浪費(見「高壓危險」),全世界電力公司都用高電壓的交流電輸送電力,到住宅區附近的變電所後再減壓到 120-240V,因此二極體燈泡的設計非常不同於傳統燈泡:它的首要任務是將高電壓交流電降壓整流為低壓的直流電。除此之外,因固態線路特性,它也必須考慮電壓及電流的穩定、散熱等問題,因此在設計上比鎢絲燈泡複雜多了,成本也貴得多。
家庭電話 與電視機及燈泡相比,家庭電話可以說是改變最少的;事實上自從行動電話普及後,許多家庭已不再使用固定的家用電話,改變了我們日常生活的方式。但仍有不少像筆者一樣頑固的長者保留家用電話的,他們將發現:雖然現在的電話機比以前的加了很多功能,如來電顯示、留言、無線分機等,但其基本結構還是保留在 1962 年世界博覽會上首次以商品名「按鍵音(Touch-Tone)」推出的按鈕撥號(也就是說 1970 年代的電話現在還是可以用的,也還可以在市面上買到)。
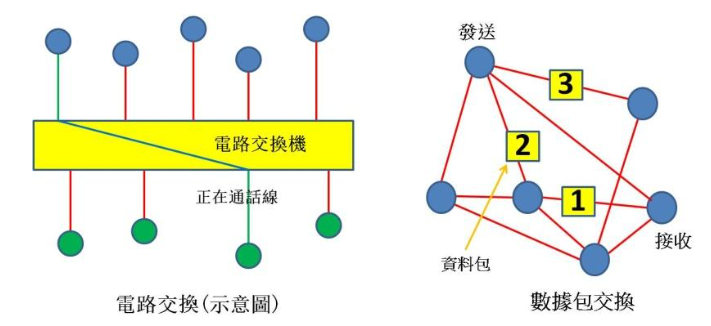
傳統電話系統通話依賴於兩個節點間的直接物理連接,在通話中這條線是不能斷的。為了覆蓋廣泛的地區,任何兩點間都直接連線當然是不可能的,因此出現了稱為「電路交換」(circuit switching)的呼叫切換技術。早期的呼叫切換是由電話接線員來完成的,但隨著電話覆蓋範圍的擴大,美國電話及電報公司(AT&T)開始推出機械交換系統,人們可以從家裡手動撥打其它號碼,不再需要人工操作員接通。到 1978 年左右,完全自動化終於消滅了電話接線員這一職業。
圖/作者提供
自從互聯網(Internet)及一種可用寬頻連線進行語音通話的互聯網協定語音(voice over internet protocol, VoIP)出現後,網路語音(VoIP)電話開始慢慢侵食傳統的家庭電話。不像電視機及燈泡,事實上傳統的家庭固定電話是有其優點,如不受斷電及不穩定網路的影響等,但因網路語音電話成本較低及較高彈性,美國聯邦通訊委員早在 2022 年 8 月就宣布不再要求美國電信公司提供銅線固定電話服務,因此相信傳統的電話系統不久將在美國消失了2 。
電路交換技術的一大缺點是:兩點一旦連接在一起,別人便不能再使用那整條電路3 ,浪費了有限的資源。現在網路語音電話的交換網絡依賴於「分組交換」(packet switching)技術。分組交換概念是波蘭裔美國工程師巴蘭(Paul Baran)於 1960 年代初提出,首先使用於美國國防部的阿帕網(ARPANET)。使用者透過網路傳送檔案時,先將檔案分割為較小的數位「資料包」(packet)形式來進行傳輸。每個資料包都有一個包括來源位址、目標位址、資料包數量和序號等的資料包頭,因此它們可以各走其獨立路線(網路節點負責指揮交通),發送者和接收者之間沒有必要(也從未)直接連接在一起,可以充分且更有效率地利用傳輸媒體。數位資料包到達目的地後,經組合再透過數據機(modem)將數位數據轉回電話線的類比訊號,傳到傳統的電話上。
以前傳統電話因為要用實體電線接到區域交換總機,所以可以從區域號碼知道這支電話的所在地;網路語音電話只要連接到任何一個網路節點就可以,所以家用電話號碼可以隨搬家移動到別的區域(例如台北的 02 區域電話號碼可以在阿里山出現),因此區域號碼已經失去其區域的意義。
結論 這些悄悄來的家庭科技中,改變最多的是電視:在軟體(數位訊號傳輸)及硬體方面(平面顯示器)都完全擺脫了舊科技,以全新的面貌在家庭中出現;接觸過舊電視的讀者,應該不難發現影像的改進不可同日而語。燈泡則只改變硬體(二極體燈泡),網路語音電話只改變軟體(分組交換訊號傳輸)。
筆者雖然喜歡新科技,但因一則較貴,再則可能不穩定,而不願做新技術的天竺鼠(實驗對象),對新技術的接受總是很遲的;即使如此,筆者的家庭也已經全面「現代化」了。但是內人除了發現電視機不同及燈泡比以前更接近太陽光4 外,根本不知道老公花了多少心血將狗窩現代化。
註解
事實上美國早在 2007 年就頒布白熾燈泡禁令,但被川普政府撤銷,該規則於今年(2023 年)8 月 1 日才又生效。台灣經濟部宣佈 2011 年底全面禁售白熾燈,五年內全面更換成二極體燈泡。
但在台灣還不流行。根據名市場研究公司 Future Market Insights 分析 :全球住宅網路語音服務市場規模預計將從 2023 年的 221 億美元增至 2033 年的 678 億美元;在預測期內(2023 年至 2033 年),全球住宅網路語音服務需求預計將以 11.9% 的複合年增長率增長。
只要電話不掛斷(如找資料暫停通話),電路就不會、也不能斷;因此原則上如果夠多人在同時用電話,將會將所有的電路線都佔罄了。
太陽表面的溫度約在 6000° C,鎢絲燈泡大都在 3000° C 左右操作以增加壽命。
延伸閱讀
《我愛科學 》(華騰文化有限公司,2017 年 12 月出版)。本書收集筆者自 1970 年元月至 2017 年 8 月在科學月刊及少數其它雜誌所發表之文章,包括本文中所提到之高壓危險(科學月刊,1976 年 5 月)、電燈的效率(科學月刊,1979 年 4 月)、太陽能與光電效應(科學月刊,2013 年 4 月)、高畫質數位電視(科學月刊,2013 年 11 月)等。
「科學家如何找到黑體輻射光譜,引發 20 世紀初的量子革命? 」,科學月刊,2022 年 7 月號。
「日常生活範式的轉變:從紙筆到 AI 」,泛科學,2023 年 3 月 8 日。