- 文 胡潔曦|黑潮海洋文教基金會 鯨豚保育研究員
- 本文轉載自黑潮海洋文化基金會《揭開鯨豚傷疤的秘密——花紋海豚體表傷疤分析》,歡迎喜歡這篇文章的朋友訂閱支持黑潮喔!
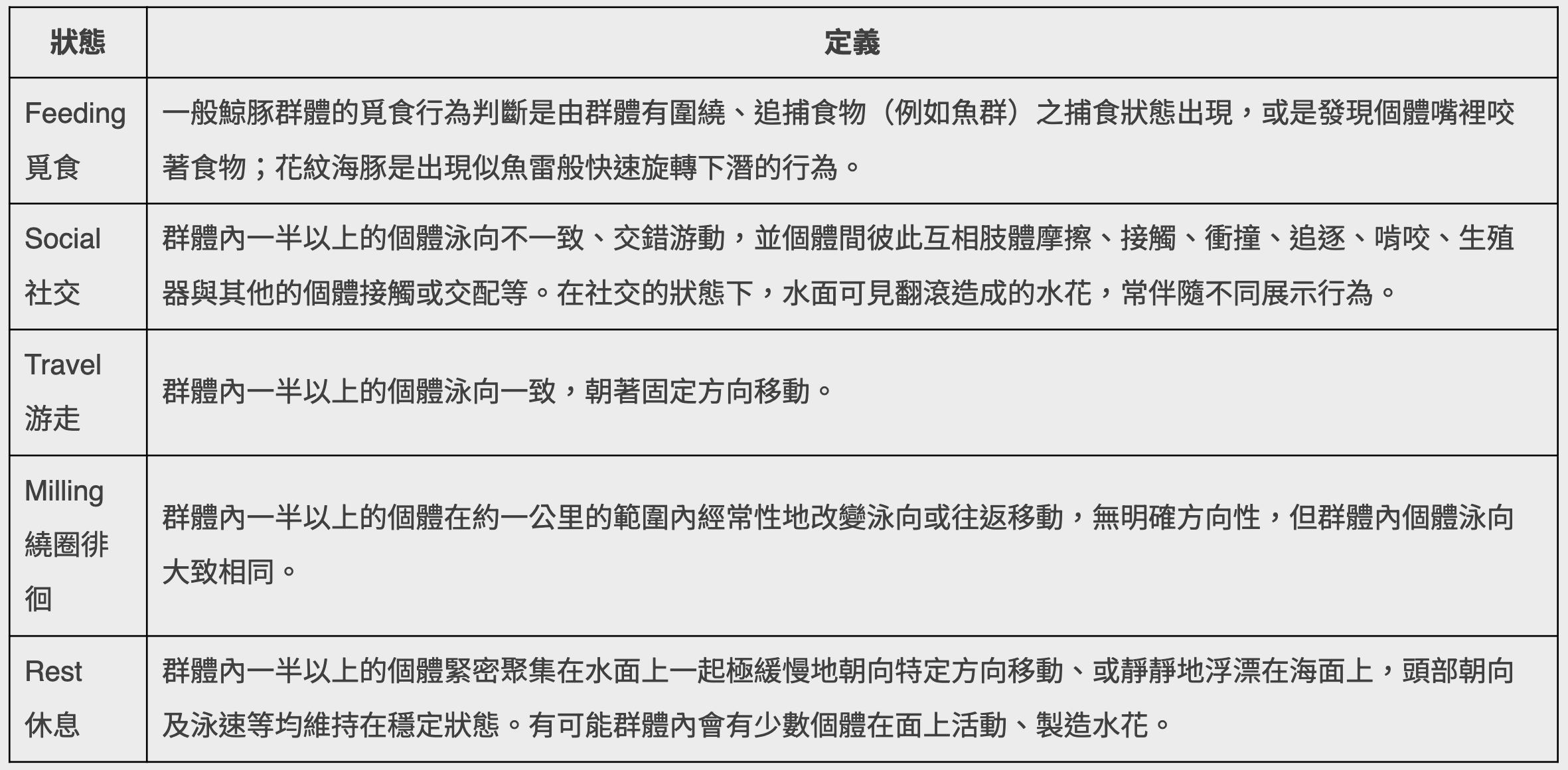
現今海洋中存在許多船舶與漁業活動,每年在世界各地造成許多鯨豚受傷與死亡,而臺灣也不外乎如此,根據 2019-2022 年海保救援網(MARN)的擱淺報告,扣除掉無法辨識原因的擱淺鯨豚個體,疑似因為誤捕死亡的鯨豚比例均在第一、第二名之間徘徊,也有少比例個體可能是因為受到船隻撞擊事件致死,海洋中的人為威脅確實是我們需要持續追蹤且改善的。
除了透過擱淺的個體瞭解人類對鯨豚的影響程度外,我們能否有機會能從活體鯨豚身上獲得相關的資訊呢?事實上,國外已有研究者透過 Photo-ID 方法,進一步推測造成鯨豚身體上傷疤的原因,部分研究發現,鯨豚身上出現的傷疤可能跟人們在海上的漁業、船舶活動,或海洋廢棄物有關。藉由體表傷疤分析,我們能更瞭解鯨豚可能遭受到的環境威脅為何,與受威脅的個體比例有多少,也能更深入思考,未來劃設鯨類保護區後要如何制訂合適的經營管理規範。

黑潮的解說員們時常提到:「花紋海豚會用身體寫日記」,這是因為牠們在受傷癒合之後容易留下淺色的傷疤,因此年紀越大的花紋海豚身上通常也會有越多疤痕,而這些傷疤對我們來說是相當重要的線索,能讓我們瞭解在牠們生命歷程中曾有哪些遭遇,包含自然的與人為的。為了完成後續的傷疤分析,我們從黑潮資料庫中選擇長期追蹤的 50 隻花紋海豚,以亞成年與成年的個體為對象,在長年由江文龍船長所提供的照片當中蒐集其身體左右兩側、從頭至尾幹出水面的清楚照片。
透過花紋海豚體表傷疤,揭示人類對鯨豚所造成的威脅
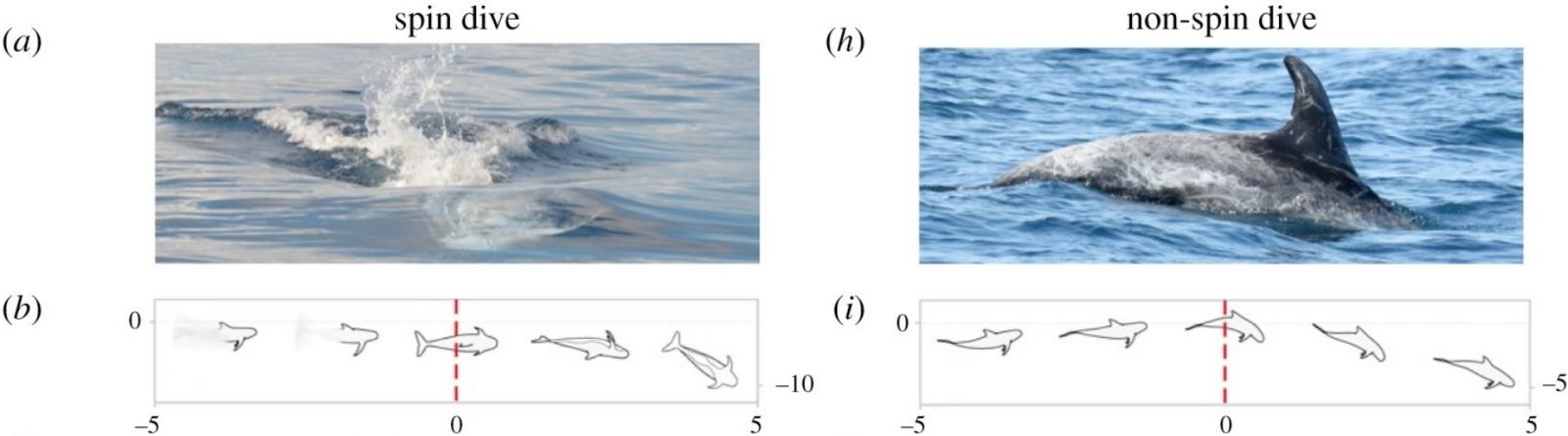
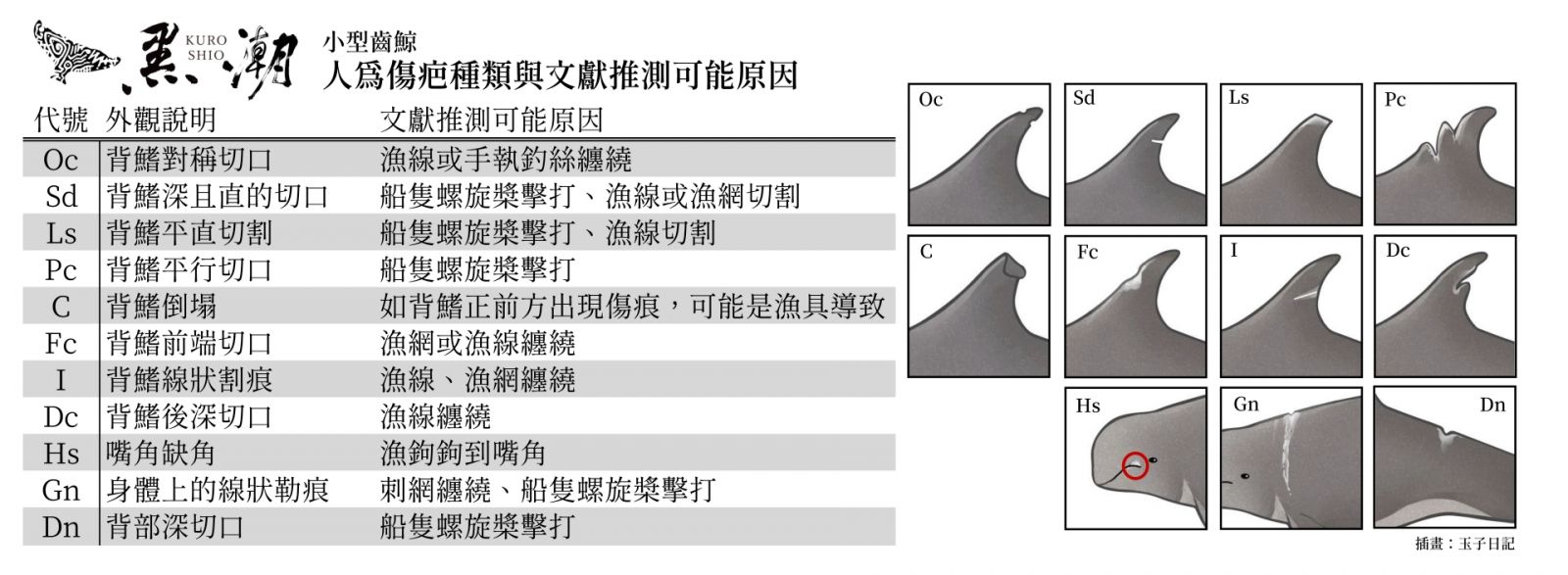
傷疤分析的第一步,我們希望能先瞭解小型齒鯨身上可能會出現哪些人為傷疤,在蒐集了數篇國外對小型鯨豚的傷疤研究後,我們從中彙整了 11 種可能因為人為因素所造成的傷疤(表一),包含了 8 種背鰭上的傷疤、 2 種位在體幹上的傷疤與 1 種出現在嘴角的傷疤,除了位置與外觀之外,我們也將文獻中所推測的致傷原因與各類型傷疤結合。在上述工作完成了之後,接下來就是要仔細地從每隻花紋海豚的各個角度找出這些傷疤,並將辨識結果詳盡地記錄下來。
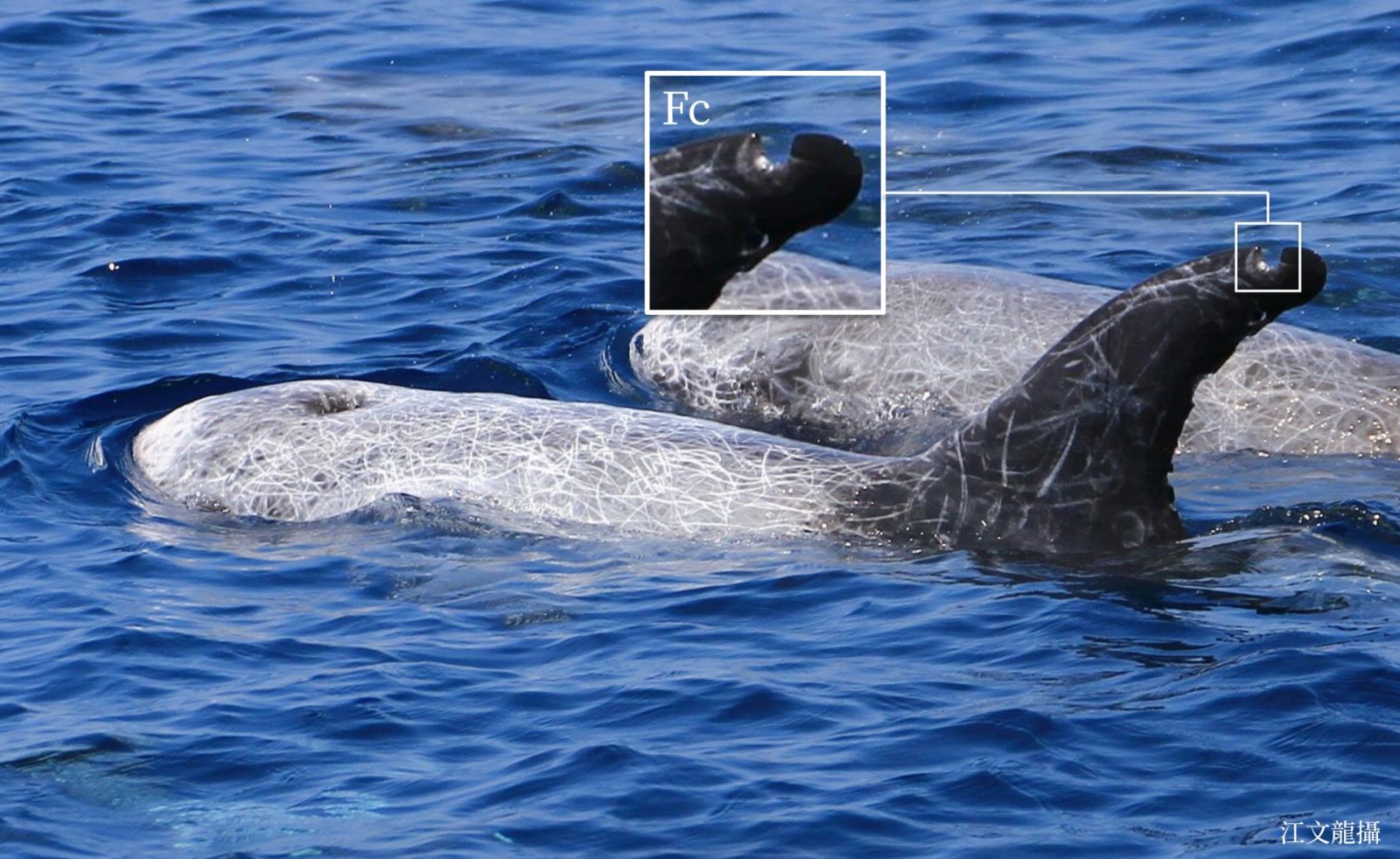
在分析的 50 隻花紋海豚中,我們發現其中有 19 隻(38%)身上有出現疑似人為活動所留下的傷疤,而這些傷疤主要出現在鯨豚身體中後段的背側,包含背鰭。為了更進一步瞭解哪些人為傷疤在花紋海豚身上較常見,我們將本次發現到的 7 種疑似受到人為因素產生之傷疤計算盛行率(表二),發現花紋海豚有兩種傷疤是較常見的:[1] 背鰭前端切口(Fc)、[2] 身體上的線狀勒痕(Gn),而根據文獻所描述,這兩種傷疤成因與漁業網線纏繞或是船舶螺旋槳可能有密切關聯。
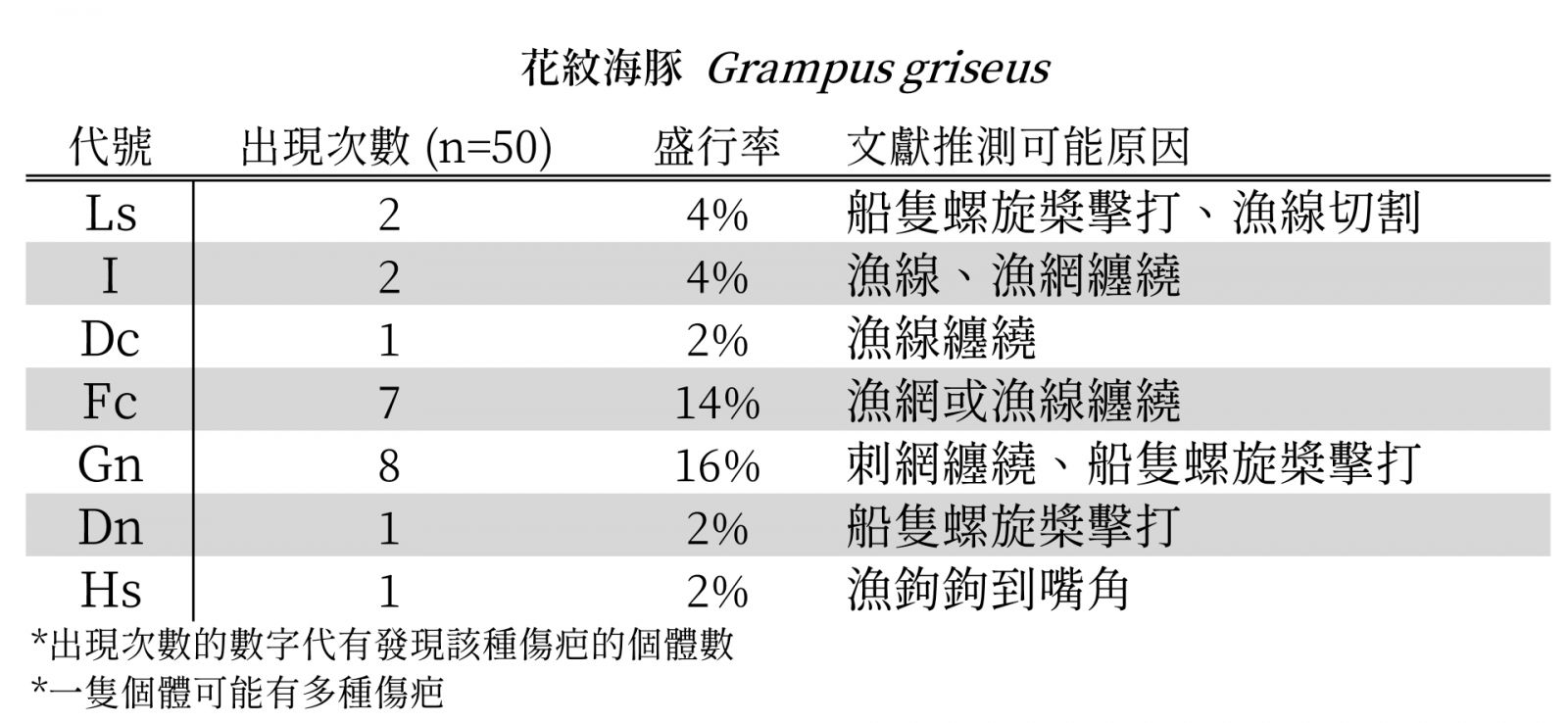
盛行率 = 出現特定傷疤的花紋海豚個體隻數 ÷ 50 隻花紋海豚
「大目流刺網」與「延繩釣」是花蓮海域需要持續關注的漁法

為了進一步確認花蓮本地漁業對鯨豚的潛在威脅,我們訪談了幾位花蓮海域目前或是過去曾操作相關漁法的討海人。過程中討海人有提到,花紋海豚時常被抓旗魚、曼波魚的「大目流刺網」纏繞或割傷,在表二傷疤當中除了嘴角缺角(Hs)外,其他傷疤均有被指認可能與大目流刺網有關,在本次分析的 50 隻花紋海豚中就有 18 隻(36%)身上出現疑似刺網留下的傷疤。而在訪談中,討海人也有提到過去曾有目擊刺網誤捕飛旋海豚(Stenella longirostris)、偽虎鯨(Pseudorca crassidens)、弗氏海豚(Lagenodelphis hosei)與吐血鯃──小抹香鯨屬(genus: Kogia)的鯨豚,而多數遭誤捕的鯨豚最後都因無法至水面上換氣死亡。
除大目流刺網之外「延繩釣」也頻繁地被討海人提及,他們提到有兩種傷疤可能與延繩釣有關,分別是:嘴角缺角(Hs)與背鰭後深切口(Dc),包含上述兩種傷疤的個體共有 2 隻(4%)。因早期魷魚、透抽價格較便宜,時常被漁民當作延繩釣的餌料,吸引中大型鮪魚、鬼頭刀上鉤,而花紋海豚以頭足類動物如魷魚、花枝與章魚為主要獵物,也可能因捕食餌料而中鉤,在掙脫後會在嘴角或唇邊留下缺角的傷疤。同時也有討海人提到,曾目擊鯨豚尾部纏繞到延繩釣的主繩,因主繩堅固不易斷裂,有可能會纏繞在鯨豚尾幹,留下較深的纏勒痕跡。就現階段瞭解,鯨豚身上出現人為傷疤可能與漁業、船舶活動、海洋廢棄物等有密切關係,而漁業行為又以延繩釣和大目流刺網有較高的關連性,但目前探究僅能說明東海岸相關的漁業活動對鯨豚有潛在影響,至於影響的程度和確切成因仍需進一步探討,也需擴大追蹤更多不同年齡層的花紋海豚個體,是我們未來需要持續關注的。
線上瀏覽圖鑑
本次 50 隻花紋海豚的體表傷疤分析分析成果,已委由人氣圖文作家「玉子日記」的巧手,繪製成花紋海豚傷疤圖鑑,接下來就讓我們一同探索花紋海豚傷疤的秘密吧!
致敬多年來提供黑潮影像資料的多羅滿賞鯨船長 江文龍、鯨豚顧問 余欣怡、作家 玉子日記與協助傷疤辨識的夥伴 江彥瑩。
致謝多年來贊助與補助海洋綠洲計畫的各單位,與捐款者。
參考文獻
- 【中華鯨豚協會】鯨豚保育的沈苛難題-漁業混獲
- 【海委會海洋保育署】台灣鯨豚及海龜擱淺報告及統計資料
- Ashe, E., Williams, R., Morton, A., & Hammond, P. S. (2021). Disentangling natural and anthropogenic forms of mortality and serious injury in a poorly studied pelagic dolphin. Frontiers in Marine Science, 8.
- Kiszka, J., Pelourdeau, D., & Ridoux, V. (2009). Body scars and dorsal fin disfigurements as indicators interaction between small cetaceans and fisheries around the Mozambique Channel Island of Mayotte. Western Indian Ocean Journal of Marine Science, 7(2).
- Luksenburg, J. A. (2014). Prevalence of external injuries in small cetaceans in Aruban Waters, Southern Caribbean. PLoS ONE, 9(2).
- Mariani, M., Miragliuolo, A., Mussi, B., Russo, G. F., Ardizzone, G., & Pace, D. S. (2016). Analysis of the natural markings of Risso’s dolphins (Grampus griseus) in the central Mediterranean Sea. Journal of Mammalogy, 97(6), 1512–1524.
- Mark Carwardine (2020). Handbook of Whales, Dolphins, and Porpoises of the World.