- 作者/About鯨豚。Facebook紛絲專頁《About鯨豚》編輯。
- 本文為系列作,上一篇為《獵補、船隻撞擊,曾經或正在上演的海豚悲劇——15 萬赫茲的悲鳴(一)》
警告,本文含有血腥照片,請斟酌自身觀看
編按:海豚是很聰明的動物,吸引了不少研究者以海豚作為研究對象。不過在倫理委員會尚未誕生的時代,科學家做出了現在看來令人髮指的海豚實驗,而一部名叫《與海豚說話的女孩》的紀錄片,正好紀錄了曾經出現過的海豚實驗。
MV 劇情為真人真事改編?
根據三立新聞的報導,記者詢問導演廖人帥後,的確有參考類似的真人真事故事,而廖人帥先是提出了過去英國廣播電視台 BBC 發行的一部紀錄片《與海豚說話的女孩 (The Girl Who Talked to Dolphins)》,也說:「其實這不是個案,我參考了很多歷史事件新聞,與海豚的習性,等於用科學的角度邏輯(一個假說),去推測可能人魚傳說的由來。」
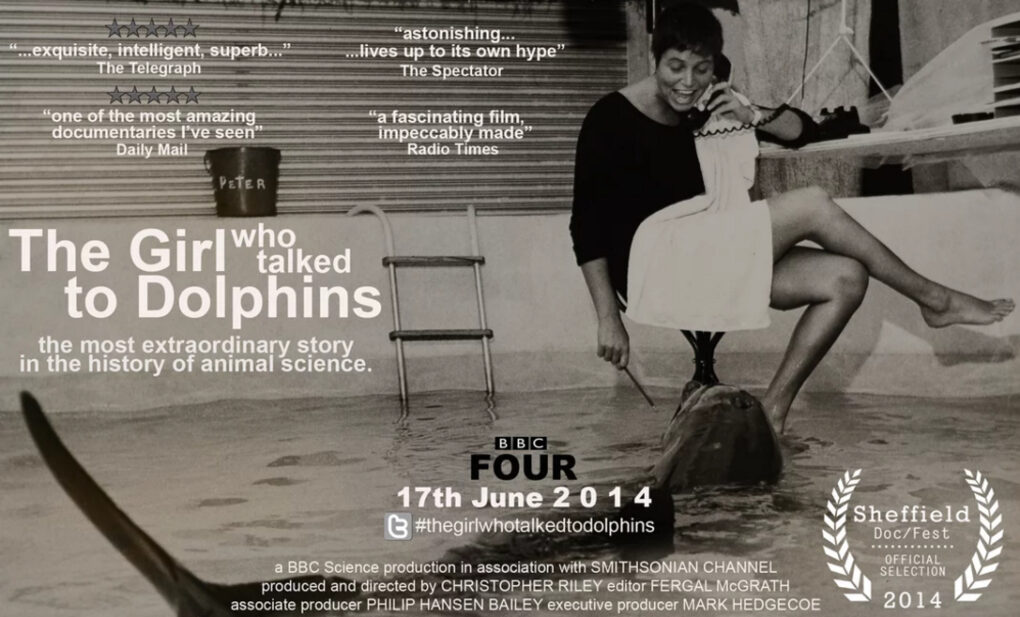
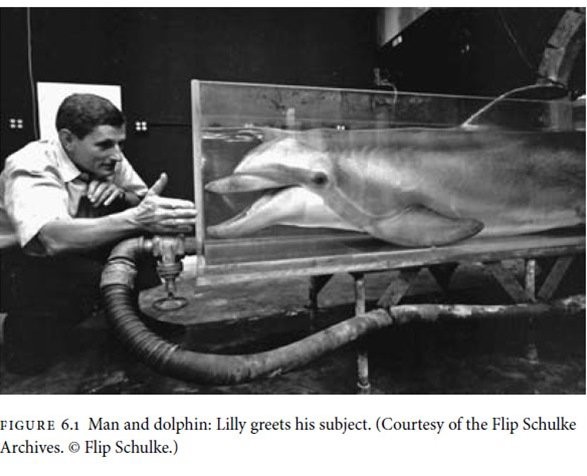
我們先來了解《與海豚說話的女孩》紀錄片的內容是在談論什麼,該片是二戰後圈養野生瓶鼻海豚的活體實驗,1960 年代,美國腦科學家 John Lilly 試圖通過與動物的交流實現人類與外星生物的交流。
有一種物種的大腦讓 Lilly 著迷,人類認為牠是動物中最聰明的,也是地球上最古老的動物之一——瓶鼻海豚。一次偶然,Lilly 發現瓶鼻海豚具有聽音模仿行為,他深信這是海豚在試圖和人類說話。
他在美屬維爾京群島的「聖托馬斯島(Saint Thomas)」建立了一座實驗室,並招募了一群科學家組成團隊,秘密地進行海豚實驗。1964 年初,一位年僅 22 歲的女大學生 Margaret Howe Lovatt 加入了 Lilly 的團隊,負責研究一隻之前從未進行語言訓練的成熟雄性海豚「Peter」。
《與海豚說話的女孩》就是 Margaret Howe Lovatt。她小時候沒有被鯊魚襲擊;她也沒有真的與海豚發生性行為,依紀錄片來看,她頂多是幫 Peter 手淫。Margaret 甚至說了:「那是牠性的一部份,並不是我的」,這表明她也不承認這是雙方有互動的性關係。
早年的動物活體實驗無疑是個悲劇。不少都是首次進行的研究,所以不了解這麼做會對動物造成傷害。例如一開始 Lilly 對鯨豚的大腦很有興趣,他想辦法運來了活體海豚,然後打算活體解剖研究大腦,就直接給海豚進行了麻醉。然而鯨類的呼吸是有意識的,牠們休眠時一半大腦是休息狀態,一半大腦是在運作。麻醉後便沒有了意識進行呼吸,所以一開始進來研究室的 5 隻海豚都不幸死亡。
或者是甚少有考慮到動物的福祉,Lilly 的海豚最後的生存環境非常的慘烈。狹小沒有自然陽光的空間、動物住在極簡的塑膠桶裡、空氣中充滿著消毒水質的氯氣。非營利組織「Dolphin Project(海豚計劃)」的創始人 Ric O’Barry 在紀錄片中認為,海豚是生活在這種不堪的環境才選擇閉氣「自殺」,而不是社群媒體所說的「為愛殉情」。
雖然當年 Lilly 的實驗看起來是瘋狂的,他中間因為研究進度卡住而對海豚注射迷幻樂 (LSD)。然而他從原先把海豚當作實驗體,到最後居然倡導海豚的保育。他釋放了他現有的海豚,這是人類史上的第一次。
紀錄片中,Lilly 在演講台上說:
「我沒有權利限制牠們,禁錮牠們,研究牠們。我唯一的權利是與牠們合作,在牠們的自然棲息地,在其自然狀態」。
Lilly 在 1980 年代開始了競選活動,他一直抨擊圈養海豚,並幫助改變海豚被人類當作觀賞物的方式,甚至美國國會通過了《海洋哺乳動物保護法》。
看到這裡的你,覺得 MV 中有哪一個情節與《與海豚說話的女孩》有共通點的呢?可能就是「有一名女性人類和一隻海豚」這一共通點吧。其實我們現今對海豚的認知,許多都是構建在這些當年於實驗中不幸逝去的生命,對於改編有著悲傷背景的紀錄片,應該要再謹慎一點。
是說,MV 導演廖人帥在接受《三立新聞網》記者的詢問表示:「(MV 劇情)等於用科學的角度邏輯(一個假說),去推測可能人魚傳說的由來」。那為什麼女性人類和雄性海豚這 2 種沒有鱗片的動物所生下來的孩子卻有鱗片?莫非孩子他爸不是海豚?!不過這可能是一個「To be continued(未完待續)」的梗,好期待!
番外篇:人類能生下海豚?
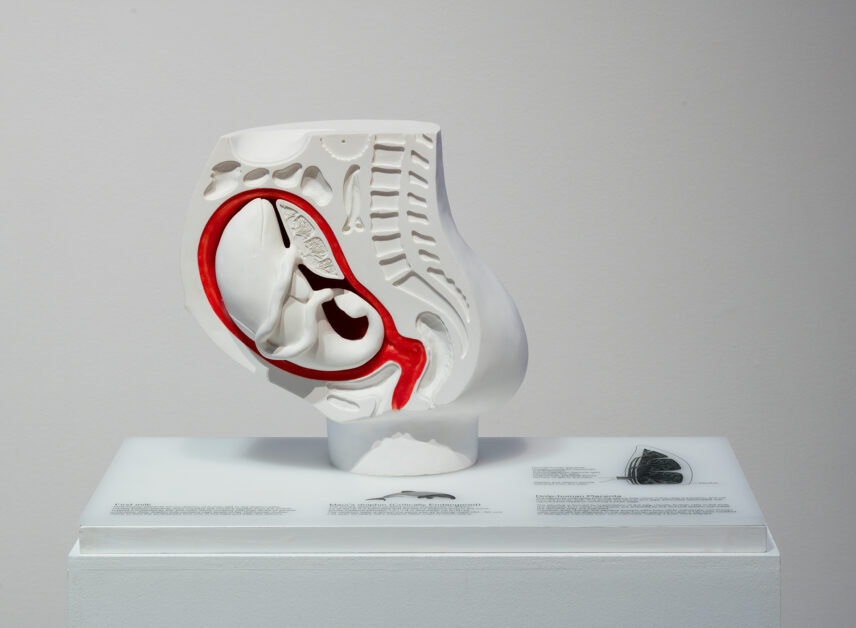
日本藝術家「長谷川愛 (Ai Hasegawa)」於 2012 年發表的一個概念作品名叫《我要生海豚 (I Wanna Deliver a Dolphin…)》。這是長谷川愛在和科學家討論後,結合生物科技對人類的「生殖能力」做的一次大膽假設。

長谷川愛在一個中文訪談影片中表示她有嚴重的經痛,並指出:「月經的不適也就是為了生孩子而準備,如果我不生孩子,這個痛苦就沒有意義了。如果我不做用這項女性身體功能,那就幾乎是浪費。」
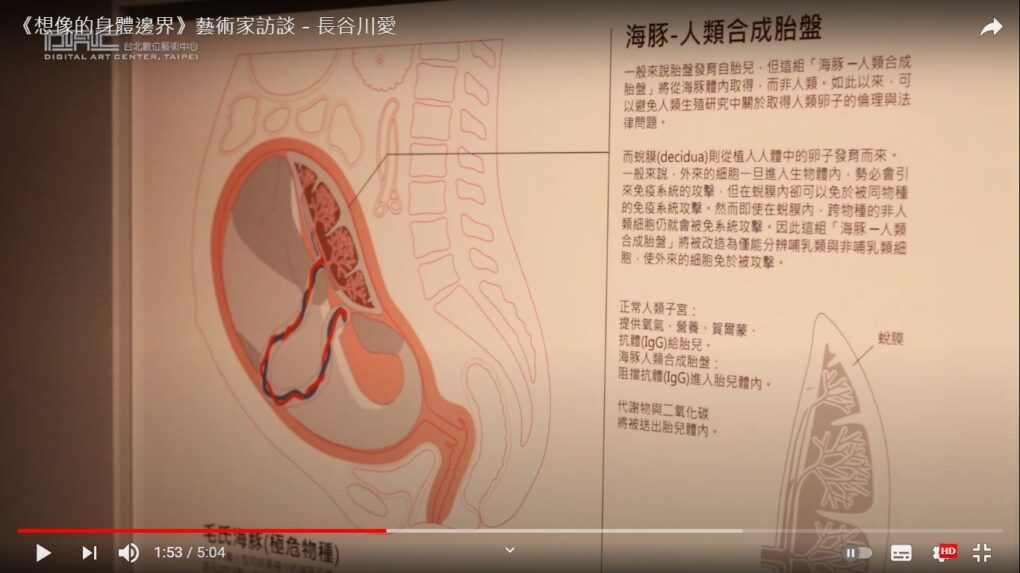
因此,《我要生海豚》這項藝術創作是想像著在未來的某一時刻,人類將通過合成生物學的先進技術來幫助某個物種。一種「海豚—人類合成胎盤」被創造出來並置入人類子宮當中,它允許人類雌性繁殖海豚,為此人類可以成為瀕危物種的代孕母親,例如現今只剩下約 50 隻的紐西蘭特有種「毛伊海豚 (Maui’s dolphin)」。
《我要生海豚》獲得了 2014 年 Core77 設計大獎的專業推測性 (Professional Speculative))亞軍!評審團在評語中提到:「這個專案代表了推測性設計的力量,通過深思熟慮的生育方案來發現問題並強化它們。該專案經過了充分的研究,並呈現出了一個完整的研究軌跡,如果沒有這種推測性的設計干預,可以說是永遠不會被探索的。」

人類社會從最早視海豚為食物,到後來成為了研究實驗體以及用來取悅我們的表演者,然而近年來,人們愈來愈嚮往在大海中擁有著自由靈魂的動物。
反對圈養、抗議商業捕鯨、重視航運安全、改良各種漁具等等,這些為了鯨類福祉而努力的聲音在社會上、甚至是現今的網路社群上從沒停歇過。在未來,如果願意的話,我們甚至可能成為瀕危海豚的代理孕母。
我們看待海豚的視角隨著時代的變遷而愈來愈明朗化,這些動物是為了自己而生,不是為了人類而生。在遠古的過去,我們彼此還是來自同一個祖先。讓我們將這段曾經分裂的關係再重新緊密相連,這不會很難,首先從尊重動物做起。
參考資料
- 【書籍】海豚:人類在水下的一面鏡子(Susan Casey)
- Ai Hasegawa 官網