- 文/阿樹《震識:那些你想知道的震事》副總編輯
在解題囉!地震定位沒有想像中簡單?──地震定位的實作篇(一)中,我們已經解析過了以下的試題(取自 107 年學測自然科),但今天我們要利用這題談談不同的情況。
請試想一下,題目中「離洛杉磯較近的地震」,如果發生在台灣附近,這樣一來在很近的時間之內,接連發生了地震,地震波的紀錄中會有什麼情況?又會對地震定位有什麼影響?
或許有人會聯想到物理上的干涉現象,但實驗室中接觸到的是理想的波動,純天然的地震波動會有點複雜,相對也會有一些較麻煩之處。
搖啊搖,兩個地震「連發」
如果我們先用開槍來比喻發生地震事件。它有可能是一把槍朝同個靶連開兩槍,也有可能是站得很近的兩人幾乎同時朝同一個靶開槍。這種現象,最常發生在大地震後的餘震,或者是在某地發生一連串的小型群震。
但是,如果是開槍的情況,我們都會事先知道是什麼情況。但實際上,地震學者或是氣象局進行定位的人員在看到地震站地震波時,完全不會知道兩個地震的震源確切位置,僅能藉由 P 波 S 波秒差推測大致是十分接近的兩個震源。而這種情況會對地震定位造成的困擾是:規模比較小或是造成振幅比較小的地震,能用來進行的地震測站相對較少。
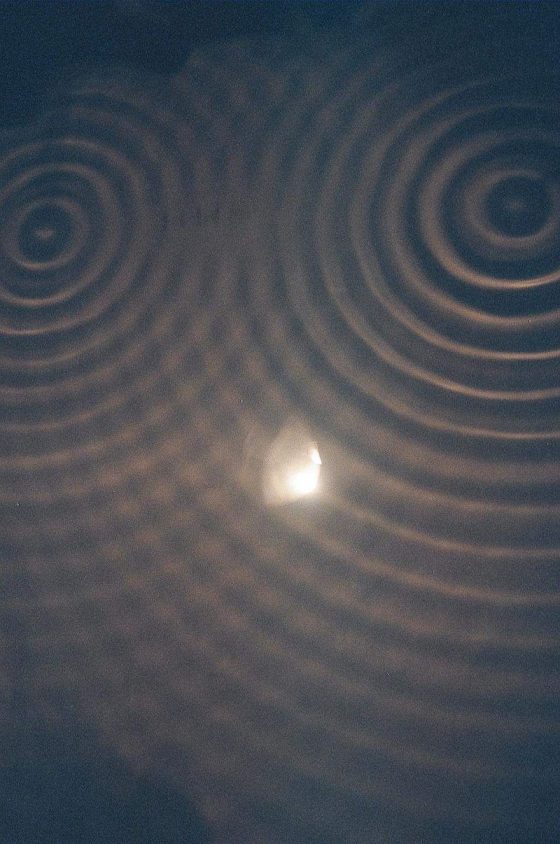
以 2018 年 2 月 6 日花蓮強震後續餘震中的編號 52 號和 53 號地震,氣象局網頁上公布花蓮市測站的「即時強地動波形」圖為例:
我們將這張圖「加工」一下,標出圖中的「6 個地震事件」(用灰色標註),此外其中包括編號 52 號和編號 53 號地震的 P 波(紅線)和 S 波(綠線):
以花蓮站的狀況看起來每個地震事件的 P 波和 S 波都明顯好認,畢竟花蓮站距離編號 52 號的震央僅僅只有 3.66 公里,而看 P 波和 S 波的間隔相近,加上這一陣子附近地區的餘震偏多,想必 53 號的震央也不會差太遠。
但是,如果到了再遠一點的地方呢?來看合歡山觀測站(加工版)的情況:
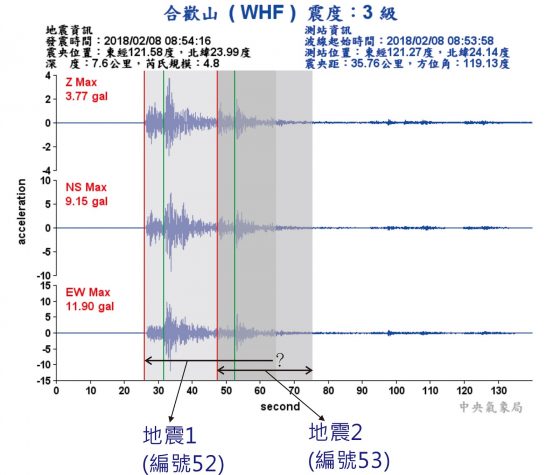
可見編號 53 號地震的 P 波已和 52 號地震後續的振動混雜在一起了。
因為地震波傳遞時,不同的頻率和振動型式的震波速度不一,就像賽車比賽一樣有快有慢。而上面這張圖的情況就是 53 號地震的 P 波已經追上 52 號地震「吊車尾」的尾波。可想而知,離震央再更遠的地方,可能連 S 波確切的位置都很難辨識了,如下面這張的德基測站波形圖(沒辦法加工,因為已經難以辨認):
圖/載自中央氣象局網頁
實際上臺灣的地震測站密度很高,即使是在這樣的情境下,還是大致能出這幾個地震的位置,然而若是兩個地震相隔的時間更短,地震波形發生相互干擾、難以辨認的測站一多,比較小的地震在波形資料上,往往會被大的地震給「蓋過去」,就有可能讓我們少發現到一個小地震。
餘震是什麼?
科學家很早就發現,較大地震發生後,通常都會有餘震,而且餘震的規模和數量也會有一定隨時間衰減的關係,這點在我們之前文章(為什麼本來是主震,一下又變成前震?餘震有可能會比主震規模大嗎?──《震識》)中也曾提過餘震衰減定律。
但到底為什麼會是這樣的情況?餘震發生的原因又是怎樣?我們再從另一篇文章(在動與不動之處,那些斷層面上的複雜事(下)──《震識》)提到的斷層模型來切入,現在從地震波反演回推斷層活動的相關研究,已經可以透過地震後的波形紀錄,推測斷層上面的破裂過程。
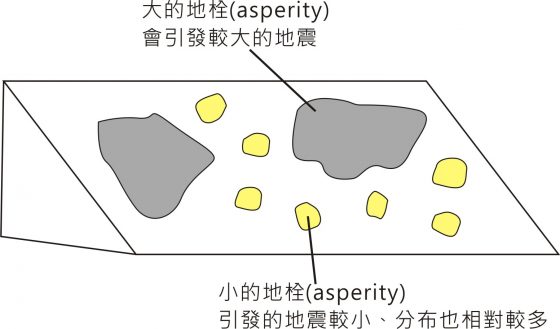
實際上,斷層的會發生破裂區域,僅在面上部分一塊塊比較「粗糙」的「地栓」(asperity),而地栓處活動發生地震時,一來可能僅釋放了局部累積的應力(或者理解成能量),二來也可能有些處於臨界狀態的小規模地栓受地震(主震)影響,因而被誘發地震,或許這樣的餘震情況,可以拿「藕斷絲連」來比喻。
從很多例子當中都會發現,餘震分布大致會和主震發生的機制接近,震源分布的位置也會大致在同樣的斷層面附近。不過,由於主震的地栓才剛劇烈的活動完,有很多的餘震是發生在斷層上主震滑動區以外的部分,這種情況在規模越大的地震越為明顯。
2016 年的台南、高雄美濃地震就有「雙主震」
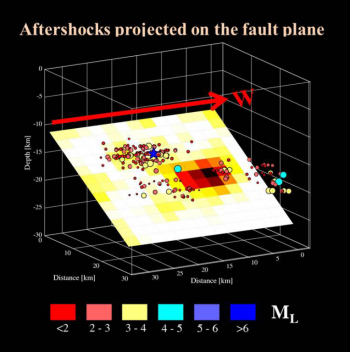
以 2016 年 2 月 6 日高雄美濃、台南的地震為例,震後報告畫出了主震時最主要的滑移區和餘震的分布,如下圖所示。圖中的白、黃、紅等方格組成的平面為斷層面,紅色為主震時最主要錯動的地方,其它小圓則是餘震,不同顏色代表不同規模。可以發現,多數的餘震集中在斷層上其它的位置,這就是主震後持續釋放能量的情況。
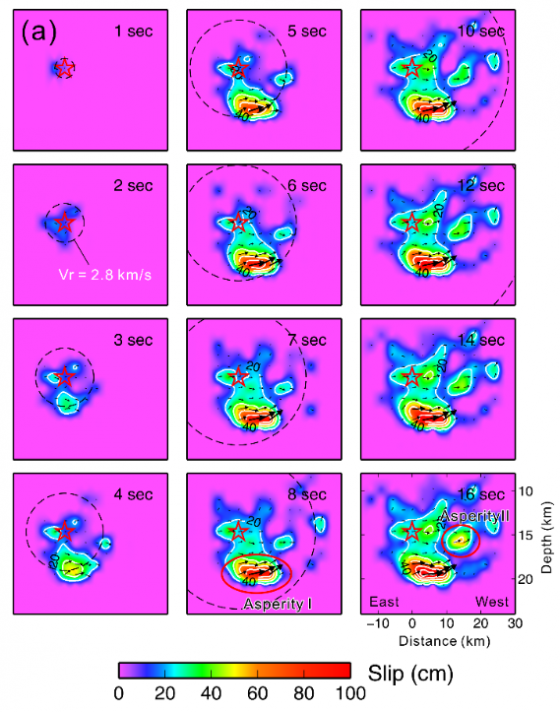
另外,這次地震正好就發生了「兩個地震在一起」的情況,一般學術上會稱作為「雙主震」,而這次地震的例子,就是相差僅數秒鐘的主震滑動而發生的地震,藉由下方的「累積滑移量分布圖」,可以看到斷層在最初活動隨時間的變化,而在 8 秒和 16 秒處用紅色圈出了兩個地栓的位置,而這兩個地栓初始錯動的時間也僅只差了一秒鐘,代表確實是兩個同時發生的地震事件。
不過,這樣類型的「雙主震」在中央氣象局最初提供的報告根本看不出來,因為地震波整個被包住了,在初步僅靠 P 波、S 波和最大振幅進行地震定位與芮氏規模計算的方式下,只會知道斷層「初始發生錯動的地點」,即是上圖標示出紅色星號的位置。
而像中央氣象局地震速報,需在極短時間或是用自動化的方式判讀地震並立即公布,就無法用前述學者解析地震波的方式來還原「案發現場」,僅能提供在短時間內盡可能精確的數據,可以說是「沒辦法中的最好辦法」,當然以這次地震的例子來說,即使作為一個地震事件處理,對於後續震度的評估,並不會造成太大影響。
地震定位、規模、震度對於防災的意義
藉此我們不妨思考一下,為何強震警報多以震度四級作為發布標準?在誤差在所難免,無法 100% 避免的情況下,即使四級的震度多半不會有重大災情,但把誤差一級的程度考量進去,我們或許應該對警報某程度多一分警戒!
像這樣有多個地震或是雙主震讓震波交雜的狀況,主要帶來的麻煩是在於像氣象局這樣第一線的資料處理端,可能會有非戰之罪的誤判或是增加資料處理的繁複程度,但這對科學家而言,卻是一個能讓我們解開斷層特性的現象。因為每一個斷層或是盲斷層都像人有百百種一樣,有不同的特性,因此多了解一些,有助於我們評估斷層未來錯動時的情況,當然,這樣的研究對於未來的防災多少也是有助益的!

延伸閱讀
- 震央在美濃,為何台南多餘震?學者:原因就是「雙主震」!
- 斷層上的短暫瞬間:動與不動之處(下)
- 為什麼一下是主震,一下又變前震了呢?
- 地震預警的地震規模不準?別太苛責,因為那真的很難…
- 20160206 高雄美濃地震
- 編號 52 號地震連結位置
- 編號 53 號地震連結位置
本文轉載自震識:那些你想知道的震事,原文為《地震定位實作篇之二:地震連發,定位者的最大煩惱》,也歡迎追蹤粉絲頁震識:那些你想知道的震事了解更多地震事。