採訪、攝影/趙珩宇、張芳瑜.協助取材/臺灣玉山機器人協會
由教育部及國際電機電子工程師協會IEEE 指導,國立臺灣大學智慧機器人及自動化國際研究中心所主辦的第六屆IRHOCS 國際機器人實作競賽,在2014 年底於松山文創園區壓軸登場。
IRHOCS 為國內最具指標性的機器人大賽之一,著重於人機互動的重要性。本次競賽共分為「機器人保齡球賽」、今年新增設的「機器手臂車」,以及難度最高的「機器人籃球賽」三個項目,現場戰況激烈、毫無冷場,以下將針對各項賽事進行進一步報導,還原精彩現場。
機器人籃球賽!國際團隊相互較勁

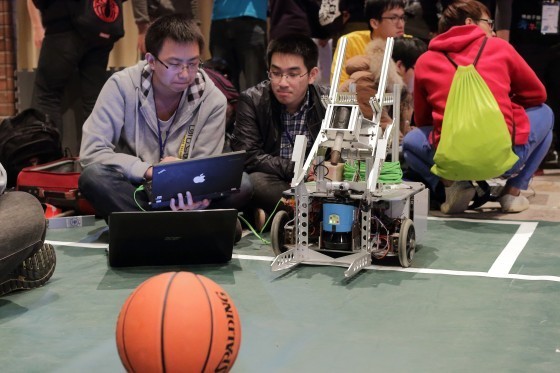
本屆籃球機器人賽參賽隊伍來自世界各地,除了臺灣的強勁代表臺灣大學、國立交通大學、臺灣科技大學等隊伍外, 還有來自中國的上海大學、廈門大學,以及來自日本的神奈川工科大學(Kanagawa Institute of Technology)等14 支隊伍同場較勁,讓本屆機器人籃球賽從預賽到決賽,場場都讓人驚奇不斷。
機器人籃球賽由於參賽組數眾多,賽事共分為上午場與下午場,上午場共分為4 組競賽,各組競賽分別為3到4 支隊伍參加,透過激烈的比賽後遴選出8 組參加下午場的四強爭奪賽以及四強決賽,每次競賽分為六個回合,將難度由淺至深漸漸增加,考驗著挑戰隊伍在機構與程式上的設計巧思。
人機協調與機器人性能雙向並進
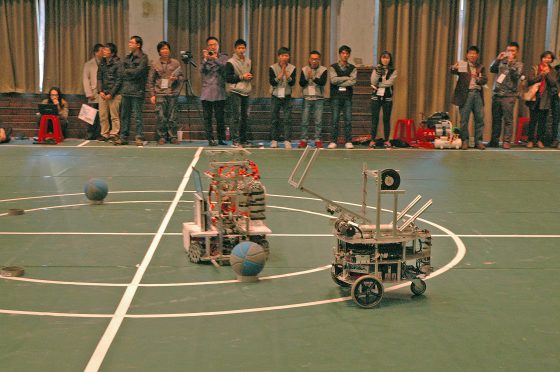
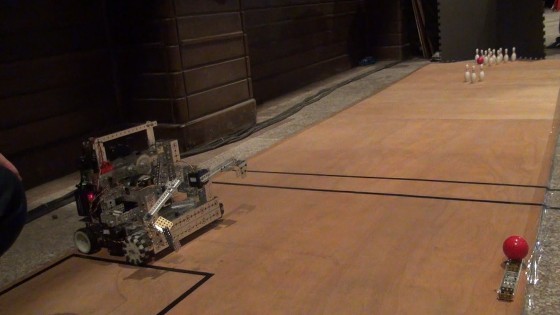
第一、二回合為最基礎的任務,參賽機器人需於比賽開始後自主的從場邊移動至跳球區,並在跳球區內持球後於中央區內(大會規範之區域)將球拋給三分線內的參賽者,再由參賽者進球得分。跳球區內共有兩顆籃球,因此機器人可於時間內再尋找第二顆球拋給參賽者,以獲得第二次的得分。
在本回合競賽中,除了考驗機器人的機構與程式,也測試著參賽者的體能與投籃技巧, 以及人機間的協調性,是項德智體兼具的活動。第三與第四回合則增設了固定式障礙物,而參賽者則只能於禁區內移動,參賽機器人需從中場的邊線出發進入籃球場內,繞過層層的障礙物後拾取在三分線底線之籃球,並將球傳給在禁區內的參賽者進行投籃;第四回合則較第三回合增加了兩個障礙物,同樣須先於跳球區拾時取色球並傳給參賽者後,才能繼續尋找另一顆籃球。

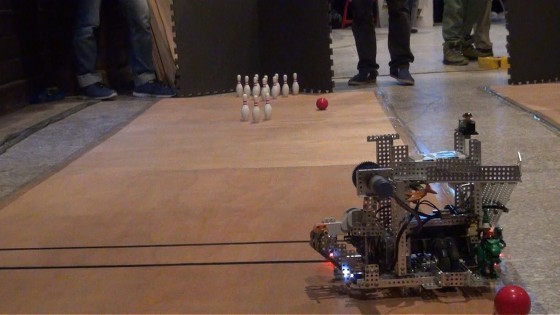
第五和第六回合是各家機器人展現出自己看家本領的精采競賽。在本兩回合中參賽機器人須於中場邊線出發,自行找到禁區中的球後再持球出發至合適的位置「自行投籃」(位置需在籃框2.5 公尺外),籃框則依高度分為正常籃球架與小型籃球架,分數也有所不同。第五回合的競賽除了考驗機器人的定位與瞄準外,也須針對不同重量之物體進行不同力道的發射,困難度較之前的競賽提升了不少。而第六回合的競賽則是籃球機器人競賽中最讓大家期待的一場競賽。在最後一回合中,跳球區的中間擋板將會被拿開,參賽機器人在投完自己跳球區中的球後則可去搶奪別隊跳球區的球進行投籃,因此除了考驗機器人投籃的準確度外,機器人移動與定位速度也是機器人間較勁的關鍵。

上午的初賽最後由臺灣大學、國立交通大學、上海交通大學、銘傳大學、中興大學、彰化師範大學、廈門大學以及臺灣科技大學晉級八強賽。
名次大洗牌!上海交大首奪冠軍
在許多機器人賽事中,在長時間的挑戰與些許時間提供挑戰者進行維修的壓力下,機器人的穩定性以及機構的耐久度往往是成就勝敗的主要關鍵。在下午的四強爭奪賽中,許多隊伍的機器人出現了不少狀況,本屆賽事最後由上海交通大學獲得第一名,國立交通大學、臺灣大學與廈門大學則分別獲得二至四名。
在本屆得獎隊伍中,大多數參賽隊伍表示:廈門大學的機器人著實帶給他們不少的壓力。廈門大學去年也參加了機器人籃球競賽,當時即以空氣砲的方式成功得到第三名,並成為全場新亮點。在本屆比賽中,除了維持空氣砲的優勢設計外,更在結構上做了不同的修正,除了持球後將籃球收至車體內以進行快速的移動外,在車輪的選擇上則使用了三輪的全向輪以進行全方位的移動,並使用從動輪與陀螺儀的搭配,在比賽前即能對場地進行相對應的座標定位,因此比賽時能迅速到達目的地。在空氣砲的設定上也有諸多巧思,他們汲取了去年因為氣瓶容量較小而得不停更換集氣瓶
的經驗,將集氣瓶從3 個增加到6 個,因此在賽前即能儲備足夠的空氣量。
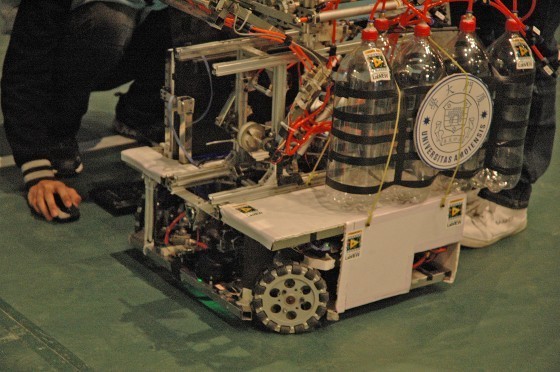
在第五回合的投籃賽中,他們則透過程式設定,在投完籃球後將氣瓶壓力的釋放到適合排球發射的氣壓值,完美配合現場狀況。但在四強決賽開始前卻出現持球裝置的馬達故障的情形,雖然在比賽期間該隊不停的進行維修,但在第六回合時故障問題還是無法修復,因此只獲得第四名的成績,令人相當惋惜。
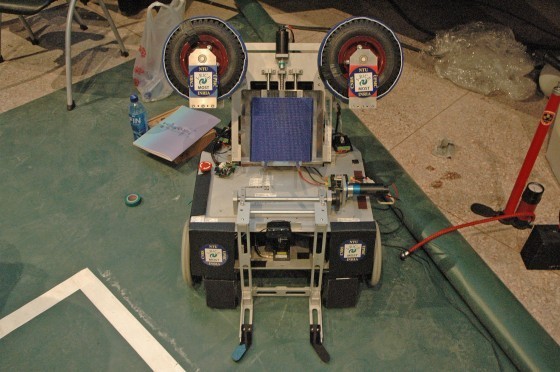
機器人籃球賽的常勝軍──臺灣大學隊伍,今年重新設計並修正了先前使用的車體結構及程式,並微調將自創的飛輪發射器,把用於發射的車輪換成可以充氣的車輪,藉此提升其發射效率。本屆賽事中雖然也出現其他使用相同設計的隊伍,但還是無法達到如創始者臺大隊一樣高的發射成績。在位置的判讀上則透過Kinect 進行空間的視覺定位,藉此找尋籃框以及籃球的位置。但在四強決賽中,由於程式在第二回合開始時出現狀況,因此意外只獲得第三名的成績,這也是臺大這幾年來首度落馬。他們表示在明年的賽事中將再次修正移動與定位方式,期望明年能扳回一成。

優異的機械穩定性為致勝關鍵
本屆第一名和第二名分別由上海交通大學以及國立交通大學獲得,兩組隊伍在機構設計上截然不同。上海交通大學使用電磁砲,國立交通大學的隊伍則使用傳統投石機的方式進行投擲。今年國立交通大學的參賽成員是首次來參加比賽,學弟們延續學長們所設計的機構,並修正程式。今年同樣透過Kinect 進行投籃瞄準,並使用視訊搭配雷射測距的方式進行微調以精確取球。在這些設計中,國立交通大學隊伍最自豪之處在於他們的「動態壁障系統」,雖然大會在比賽前將移動障礙物的項目取消,但未來還是期待這套雷射避障系統能有發揮的機會。
雖然獲得第二名的良好佳績,但他們仍不因此而自滿,未來會針對機器人的程式傳輸方式上進行修正,將現在透過Wi-Fi 操作的方式改為直接將電腦安置在機器人上,藉此減少程式傳輸時所消耗的時間;在投擲方式上也會進行調整,以投到標準籃框為目標努力。

上海交通大學的機器人花了一年的時間進行設計與調整,在發射裝置上使用電磁砲的方式,透過電磁鐵將籃球撞出;在移動上則同樣使用雷達進行感測,並以優異的機械穩定性獲得本屆機器人籃球賽的冠軍。雖然終於成功拿下冠軍,但參賽隊員也表示還有不足之處。由於採用電磁砲的方式進行發射,如要投至標準籃框則會因電壓的不足而無法達成,下次參加比賽時會進行發射器的修正與改造;在感測器與程式設定的部分,也期望能更進一步,在比賽前不需要帶領機器人跑過路線即能自行判讀並進行找球與投球的動作,讓機器人的自主性更上一層樓。

本屆IRHOCS 機器人競賽雖然沒有開放給一般民眾參觀,可見度不若之前來得高;但在比賽活動期間,各隊伍透過每階段的比試、觀察與交流,對於機器人的調校與設定都有不同的啟發與感想。相信在未來,IRHOCS機器人籃球賽還會有更高水準的表現驚豔全場。
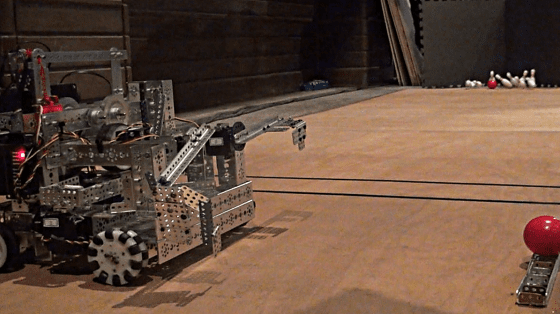
機器人保齡球賽!虎尾科大摘下雙料冠軍
今年的機器人保齡球賽吸引了國內外逾50 支參賽隊伍共襄盛舉,場上各式機器人爭奇鬥艷,在外觀造型、運作形式與機構設計上各有特色。由於保齡球賽隊伍數眾多、競爭激烈,會場內瀰漫著緊張氣氛,各隊人馬無不摩拳擦掌,把握每次短暫的準備時間,將機器人調整到最佳狀態,力求擊出亮眼成績;而機器人的精采表現也不負眾望,在競賽過程屢屢讓現場驚呼四起。激戰過後終由來自國立虎尾科技大學的「E.A.C」及「N.P.N.G」兩隊雙雙奪下NXT 與KNR 系列控制平臺組的冠軍寶座。
機器人保齡球競賽以順利擊倒球瓶為目標,競賽流程計有初賽兩回合(每回合三局)、決賽一回合(五局)。每回合結束後,依競賽成績決定下一回合入圍隊伍,初賽以兩回合最佳成績較高者為勝,決賽部分以成績較高者為勝。
今年的賽事有兩項重大變革:其一為採用更接近真實比例的保齡球競賽場地,將淨空區增長為3 公尺多,並使用白色雙紅線的木製迷你保齡球瓶;其二則是在決賽的四、五兩局設置三支「障礙球瓶」做為創意挑戰,挑戰局單局結束時,每支倒下的障礙球瓶會扣5 分,直到該局零分為止。每局中, 機器人必須自主完成取球、投球、再取球、再投球的動作,除非第一球全倒,否則有兩次投球機會, 而機器人每次僅能取走一顆球,各回合的最後一局若擊出全倒或補全倒,則有投第三球的機會。擊倒球瓶的分數計算方式同一般保齡球規則,除此之外, 機器人是否能成功取球、投球,並在完成動作後歸位,也列入計分範圍,可說是對機器人自主性的大挑戰。

增設障礙瓶,提升比賽可看性
經過一番激烈競爭, 前16 強隊伍分為四組晉級決賽,三局正常局加上兩局創意挑戰的最後一戰,可說球球都是關鍵。選手們各個全神貫注,深怕稍有不慎就與獎項擦身而過。精彩賽事由A 組的「N.P.N.G」拉開序幕,率先擊出Strike(全倒),C組的「E.A.C」隨後也擲出Strike 還以顏色。機器人蓄勢待發的「轟隆隆」加速聲,與「喀啦喀啦」的齒輪運轉聲不絕於耳,選手們緊張的神情全寫在臉上, 觀眾們更是看得屏氣凝神。「咻」一聲,只見保齡球衝向球道,完美地擊倒所有球瓶,引起滿堂喝彩。
創意挑戰局的部分,因為在目標球瓶前增設了三支障礙球瓶,大大提升了擊球的困難度,如何擊倒最多目標球瓶,同時避免撞倒障礙瓶,著實考驗參賽者的創意應戰策略。只見各隊紛紛使出渾身解數,有些挑戰斜向擲球,越過障礙打擊目標;有些考量機器人的穩定性,選擇靠球道側邊投球,捨棄部分球瓶,僅以角落位置為目標,大家各憑本事。有些隊伍擔心誤觸障礙瓶被一再扣分,只求順利發射不產生任何碰撞,還會不小心發生向後發球的情形,替比賽現場增添了一絲趣味性。
取球難度高,精準穩定為關鍵
這次競賽中,兩回合初賽抽籤決定出的置球位置皆在相鄰球座上,許多隊伍因為精準度與穩定性不足,導致取球階段頻頻失誤,幾乎無法順利出擊。由此可知,想要脫穎而出,除了精湛的投球技術,取球技巧也是致勝關鍵。
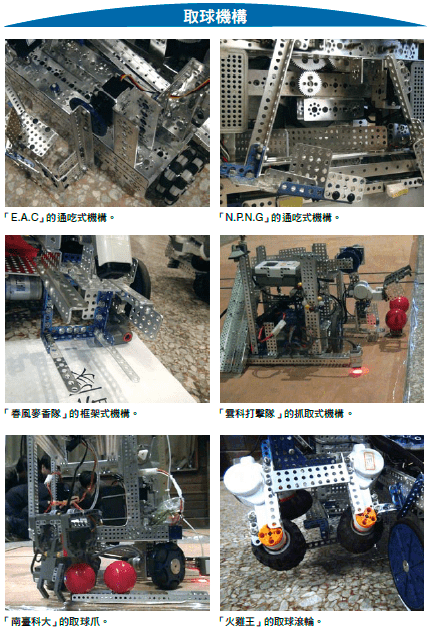
在NXT 系列平臺拔得頭籌的「E.A.C」隊員黃志豪表示,當初團隊在設計機器人時,就決定無論如何都要拿到取球和回位的基本分,並且為了降低受場地影響程度,特別設計了通吃式取球機構,透過齒輪比加強發射力道來提升擊球的精準度。
其他獲獎隊伍亦各自展現令人驚豔的設計巧思, KNR 平臺冠亞軍「N.P.N.G」及「A.V.R」兩隊, 同樣採用「球座通吃,只取一球」的策略,不僅不必判斷保齡球擺放的位置,還因為不需使用感測器,完全避免掉判讀出錯的風險。
來自亞東技術學院的「春風麥香隊」, 則藉由框架結構配合感測器取球;另外也有隊伍以機械手臂掃入或抓取的方式,來達成精準取球的目的,現場可說是各種取球機構的大觀園,令人驚嘆連連。
相互切磋,選手滿載而歸
從現場相機快門聲此起彼落的情況看來,保齡球機器人競賽的吸睛程度可想而知。在令人目不轉睛的決賽過後, NXT 平臺組冠軍由「E.A.C」奪下,亞、季軍則分別由「春風麥香隊」及「雲科打擊隊」取得;KNR 平臺組的冠軍則由一路領先的「N.P.N.G」拿下,緊追在後的「A.V.R」居次,季軍的殊榮則由「快樂_ 擊倒」獲得。
談到參與競賽的收穫,初賽表現亮眼的「幸運草」隊隊員施昶宏強調,這次使用電子羅盤定位,容易受到干擾,擊球的準確性有點靠運氣,看到部分隊伍穩定的設計,會考慮學習並改良; 備受矚目的「N.P.N.G」隊隊
員黃建祥亦指出,看了其他隊伍的精采表現,想再改良夾取方式,林煒翔補充, 許多機構設計讓人印象深刻,團隊的抗壓性也在競賽過程中提升;表現不俗的「A.V.R」隊隊員王若庭則表示,在極短的時間內找到造成運作失常的原因並調整修正,累積應變實力是最寶貴的經驗。
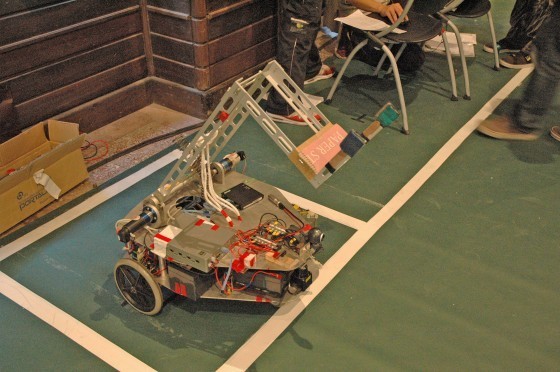
機器手臂車!考驗機器人環境適應力
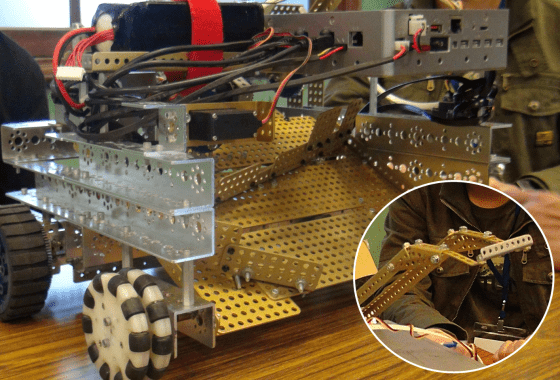
今年IRHOCS 新增了「機器手臂車」項目,希望透過四大主軸:循軌移動、無軌移動、物件搬移和影像辨識,逐步引導參賽者整合影像辨識與移動平臺,設計出智慧與創意兼具的機械手臂,以期未來能應用於產業界。
由於競賽題目難度偏高,加上場地相當考驗機器人的環境適應力,多隊選手皆表示表現不如預期。「高雄二隊」隊員坦言這次準備不夠充分,現有的技術尚無法完全達成競賽任務,主要靠簡潔的機構設計降低出錯率取勝,也期望藉由這次參賽經驗,明年能有更好的表現。
本屆賽事冠軍為「高雄二隊」( 高苑科技大學)、亞軍為「自主倉儲移動機器人」(國立臺灣科技大學)、季軍為「信手拈來」(國立臺灣師範大學),四、五名則由「請你吃西堤」(成功大學)及「ISL 1 隊」(國立雲林科技大
學)獲得。
競賽網址
http://www.iceira.ntu.edu.tw/irhocs2014
文章原文刊載於《ROBOCON》國際中文版2015/3月號