

- 作者/陳子翔|師大地球科學系、EASY 天文地科團隊創辦者
看到下圖密布於太陽系的小行星軌道,你是否會對小行星撞地球這樣的災難感到擔心呢?
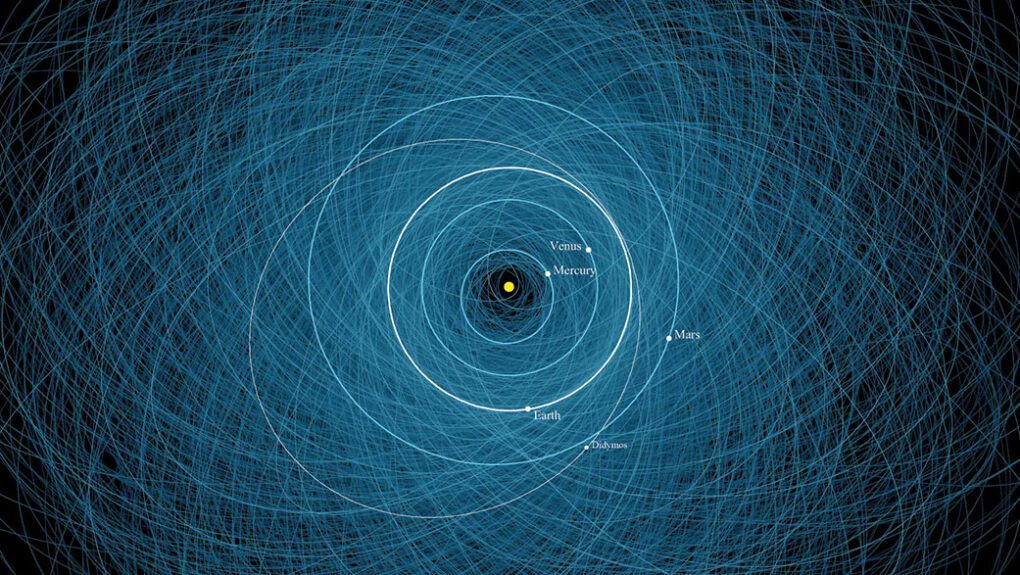
事實上面對小行星的撞擊風險,科學家也是嚴陣以待。畢竟即便是一顆直徑只有數十公尺的小行星撞上地球,其威力也足以摧毀一座城市。更何況還有許多直徑數百公尺,甚至數公里的近地小行星(near-Earth asteroids)存在。因此,對於這些小行星的觀測、研究與監控就顯得格外重要。
揪出藏身夜空中的小行星
對近地小行星監測的第一步,就是要先找出「它們在哪裡」。如同在戰場上比起收到敵方要發動攻勢的情報,更可怕的就是連敵人是誰、敵人在哪裡都還不清楚就被暗中襲擊了。
然而棘手的是,由於直徑小,反照率低的特性,小行星的亮度往往非常低,需要仰賴觀測性能強大的天文台才有辦法看見它們。但大型天文台的觀測視野卻通常很小,難以有效率的「掃描」廣大的夜空,而且這些天文台本來就有很多天文研究工作要進行,能撥給小行星觀測的時間也相當有限。
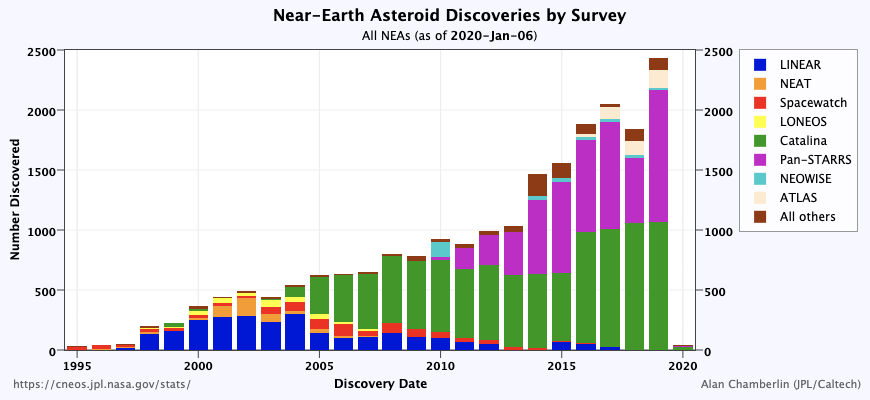
有鑑於這些因素,專門設立搜尋近地小天體的計畫與望遠鏡,就成了更合適的選項。像是林肯近地小行星研究小組(Lincoln Near-Earth Asteroid Research, LINEAR)、卡特林那巡天系統計畫(Catalina Sky Survey, CSS)以及泛星計畫(Pan-STARRS)等。它們扮演「小行星獵人」的角色定期掃視夜空,尋找移動中的可疑光點。目前透過這些計劃發現的近地小行星已經多達數萬個。
用自動化的監測系統,找出小行星中的「危險份子」
發現這些小行星的下一步,就是由觀測資料計算出它們的軌道,並找出哪些小行星對於我們的威脅比較大。而面對數量龐大的近地小行星資料,NASA 噴射推進實驗室(Jet Propulsion Laboratory, JPL)早在 2002 年就開發出一套名為「哨兵(Sentry)」的監測系統,運用設計好的演算法,自動化的評估每個近地小行星撞擊地球的機率,並列出對地球威脅比較大的小行星名單。
以目前的速率來看,每年大約有 3000 個新的近地小行星被發現。而未來隨著更多更先進的天文台投入小行星搜尋的計畫,可以預期小行星的發現數量還會出現顯著的成長。因此就在不久前,NASA 的天文學家已發展出下一代更先進的小行星監測系統:哨兵 II(Sentry II),以因應未來更龐大的資料,同時也對已經使用了近 20 年的哨兵系進行補強。
監測系統升級上線,更完善的為地球把關
就如同各種應用程式都會進行版本更新,並在更新中修正上一個版本的缺點,這次哨兵 II 系統的升級,也從哨兵一代系統多年累積的經驗進行修正。
首先,第一代哨兵系統只有計算萬有引力對小行星軌道的影響,並沒有考量其他外力,例如來自太陽的輻射壓等等。這些力量雖然相對微小,但積少成多、聚沙成塔,長期下來也能影響小行星運行的軌道。另一方面,由於小行星本身會自轉,因此小行星的受光面和背光面會不停改變方向,如此一來熱輻射對小行星造成的力,也會隨著轉動而變化,這個效應被稱作「亞爾科夫斯基效應」(Yarkovsky Effect)。而哨兵 II 的演算法都有將這些因素納入考量,讓小行星的軌道估計算更為精準。
再來,當小行星的非常靠近地球時,受到地球引力的影響,軌道以及速度都會大幅改變。其原理與太空探測器借助行星的引力來改變自身的軌道和加減速的「重力彈弓」效應相同。
然而太空探測器上面有很多精密的儀器提供科學家精準的定位,小行星卻只能透過地面觀測來估算出它的軌道,科學家其軌道掌握的精確度當然就比較差。而當小行星接近地球時,軌道的計算誤差就會被大幅放大。一個小行星飛掠地球時幾百公尺的誤差,到了下一次來訪時可能就成了幾千公里的差別了。而這幾千公里,就有可能是「撞上地球」和「安全通過」的差距。好消息是,由於在軌道計算上考量的因素更全面,演算法也更加精密,讓哨兵 II 即使在面對這樣的狀況,也能計算出更為精準的結果。
最後,哨兵 II 系統在計算小行星的撞擊風險時,判斷的方式也相較上一代系統更縝密。如同任何觀測與測量,小行星的軌道也會存在誤差,而哨兵 II 會從小行星軌道的誤差範圍內隨機取樣進行計算,以檢查小行星有沒有撞上地球的可能性。相比於第一代哨兵系統預先將有撞擊風險的軌道推算出來後才評估撞擊機率的做法,這樣的更新能降低漏網之魚出現的可能性。

持續探索可能的威脅
小行星、彗星等天體的撞擊一直以來都是很多科幻作品的題材。從科學的角度來看,太陽系中也的確存在非常多小天體,可能對地球上的生命構成威脅。雖然對於近地小天體的災害預防,當今的科學與科技還遠達不到萬無一失的程度,但過去三十年,人類對近地小行星的認識已有了顯著的進展。從搜尋小行星的各個計畫,到針對小行星的太空探測任務,以及本篇文章介紹的兩代哨兵監測系統,都帶給我們許多重要資訊,立下人類面對小行星撞擊風險時不可或缺的基石。
延伸閱讀
參考資料
- NASA’s Next-Generation Asteroid Impact Monitoring System Goes Online
- A novel approach to asteroid impact monitoring and hazard assessment







































{kind=link}