眾所周知,狗狗有著一副靈敏的好鼻子,能夠感知周遭環境變化,然而不僅如此,最近更有研究指出,牠們可能還具有另一項隱藏能力——自動導航功能。這項功能就像狗體內擁有能感應磁場的羅盤,可讓牠們利用地球磁場推算陌生地形上的捷徑。
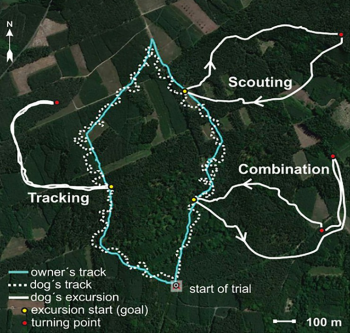
新研究發現,狗從陌生地折返回原點的方式有兩大類:一是隨著氣味依循原路回去的「原路折返」,二是從全新的路跑回來的「偵查折返」,其中有些採用偵查折返的狗會在回程時出現「沿著南北軸短跑」的現象,出現這種行為的狗,更有機會以最短的路徑回到牠們的主人身邊。

磁感悄悄出現?曾經發現狗會「定位」
「(導航能力)這是第一次在狗身上發現」,研究海龜磁感與導航的生物學家凱瑟琳.羅曼 (Catherine Lohmann)註1 如此說道。
她提到,跟鳥類等遷徙動物比起來,對於狗身上導航能力的研究其實相對少得多。英國斑戈大學註2研究鳥類導航的生物學家理查.荷蘭 (Richard Holland) 則附和道:「這是洞察狗如何建構牠們對於整個空間的畫面的機會。」
不過關於狗、其他動物甚至是人類「或許能夠感知地球磁場」這樣的情形,其實早已有過一些線索。2013年,已經研究磁接收 (magnetic reception) 30年的捷克學者海尼克.布爾達 (Hynek Burda)註3 和他的同事就表示,狗在排尿和排便時會傾向將自己定為南北向,而同時,因為這樣的行為與標記和辨認領地有關,所以布爾達將這種定位校準解釋為「能夠協助狗釐清現在的位置與周遭的相對關係」。
然而,這種穩定不變的校準(白話文:知道東西南北),跟導航能力其實是兩回事。
隨意跑開後,狗竟然能從一條完全陌生的路折返?
在新的研究當中,布爾達的學生卡提捷娜.班尼迪克托瓦 (Kateřina Benediktová) 先將攝影機和 GPS 追蹤器放在4隻狗身上,然後再帶牠們到森林裡,接著讓狗四散而去,去追尋平均約 400 公尺外的動物氣息。
有趣的是,GPS 追蹤器顯示狗在回程路上(跑回向牠們的主人)出現兩種行為:一是「原路折返 (dubbed tracking)」,可能就是隨著氣味以沿著牠來時的路程回去;另一則是「偵察折返 (scouting)」,也就是從一條全新的路跑回來。
當卡提捷娜將獲得的實驗結果資料給布爾達看時,布爾達發現了一個奇怪的特性:在偵察折返的途中,狗會突然停下然後先向著南北軸跑個 20 公尺左右,才再又開始往回跑。那種短暫的 20 公尺小跑有點像是要校準磁場方向的模樣,但卡提捷娜還沒有充足的資料可以肯定這樣的推論。
於是他們擴展了這項研究計畫,幾乎人人都有養一隻獵犬的狩獵管理與野生動物學系註4的同事也投入研究,3年來透過27 隻流浪狗進行數百次實驗。
在進入森林實驗時,研究團隊會試著避免給予狗其他能夠辨識方向的線索。只要情況允許,狗都會被帶到從沒去過的森林裡的一處,如此一來牠便不能依靠熟悉的地標來找路。同時主人會在牠開始漫步時就躲起來,以免狗是藉由看見主人而跑回來。另外,由於狗跑回來時,風向很少是從主人吹向狗的,所以氣味也不太會造成影響。
研究人員仔細看了 223 例的偵查折返狀況,發現狗會在回程時平均漫步約 1.1 公里的距離,而這當中有 170 次出現了「狗先停下,再掉頭沿著南北軸跑 20 公尺」的情形。同時,研究者們也指出,出現這種行為的狗,更有機會以最短的路徑回到牠們的主人身邊。「我真的對這樣的實驗結果感到蠻震撼的」羅曼如此說道。

內建羅盤判斷最短回家距離?!其實不太意外
布爾達認為狗之所以會沿著南北軸跑是為了釐清牠們的方向,「這是最合理的解釋」他說。
羅曼則表示,這個行為的意義在於狗可能能夠記得牠們之前的移動路程,然後再藉由參考體內的磁場羅盤,來釐清回家的最短路徑。
之後布爾達和卡提捷娜也開始嘗試另一種實驗方法,他們打算在狗的項圈中放入磁鐵,干擾磁場,然後觀察這樣是否會妨礙狗狗辨識方向的能力。這樣的想法與 1980 年曾經發表在《科學》期刊上的一篇爭議性實驗類似,當時的實驗是針對人類,研究者將磁鐵放入蒙眼受測者的眼罩中,實驗結果發現磁鐵似乎會擾亂人類直覺的方向感1。
不過羅蘭大學註5專攻狗隻行為的亞當.米克洛希 (Adam Miklósi) 則認為,要設計磁感的實驗其實是相當繁複的,因為很難排除其他感官,讓一隻動物完全只依靠一種感知來做出行為。
「這樣操作的難處在於為了要百分之百證明磁感,或是任何一種感知,你必須排除所有其他的感知。」
而米克洛希亦說道,其實「狗能夠利用磁場來辨識方向」並不是太令人吃驚的事,因為這似乎是一種古老的能力,而且可能出現在任何會橫越大片土地的哺乳動物身上。羅曼也贊同道:「你會期望動物在狩獵之後能夠藉這種方式回家,顯然能在狗身上看到應該滿合理的。」
註解:
- 時任北卡羅萊納大學 (The University of North Carolina at Chapel Hill) 生物系的助理教授。
- Bangor University。
- 為布拉格捷克生命科學大學 (Czech University of Life Sciences Prague) 的感官生態學家 。
- The department of game management and wildlife biology, Czech University of Life Sciences Prague。
- Eötvös Loránd University。
參考資料:
- Baker, R. R. (1980). Goal orientation by blindfolded humans after long-distance displacement: Possible involvement of a magnetic sense. Science, 210(4469), 555-557.
本文主要編譯自:Dogs may use Earth’s magnetic field to take shortcuts