

每次過彎都要到極限?轉向不足或過度都有危險!
在車輛轉彎的過程中,當車輛轉彎的速度達到車輛轉彎的極限,車輛會存在兩種轉向特性,即轉向不足和轉向過度。何謂轉向不足及轉向過度?我們可以用下圖(抓地力圓)來說明:
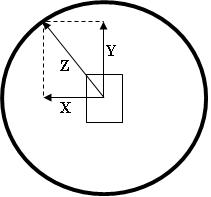
- X 座標代表車輛在轉彎時由於慣性所產生的離心力(主要受車速和轉向角度影響)
- Y 座標代表驅動力
- Z 座標代表合力
- 圓圈則代表輪胎與地面之間的最大抓地力。
輪胎和路面一定的情況下所產生的抓地力理論上固定,離心力和驅動力的改變都會引起合力的改變。當合力大於抓地力時,輪胎就會沿著合力的方向滑動。如果這個輪胎位於前輪,就是轉向不足。如果這個輪胎位於後輪,那麼出現的就是轉向過度。
更具體的解釋,就是車頭或是車尾哪一個部分的輪胎先失去抓地力。
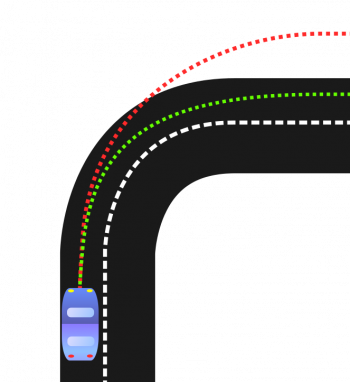
轉向不足的情況就是前輪喪失了抓地力,在沒有導向力的牽引下,加上車輛原本的慣性推著汽車往前跑,駕駛者就會有彎道轉不過去的感覺。
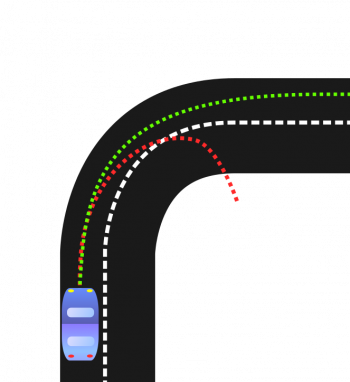
轉向過度就是後輪先失去了抓地力,但是因為前輪還擁有抓地力,因此後輪會以比前輪更快的速度往前跑,駕駛者會覺得車子轉得太多了。
相較於轉向過度來說,轉向不足是比較穩定的,只要把車輛的速度降低下來,通常前輪的抓地力就會恢復,車輛就在控制之中,這就是為什麼幾乎所有的道路用車輛都刻意設計得偏向轉向不足。不過要克服轉向不足就是要慢下來,在賽車中這可不是好事,因此賽車的調校都會避免轉向不足的設定。而轉向過度與轉向不足相比則是高度的不穩定,除非駕駛者做出很快地技巧性修正方向盤及油門,否則一旦轉向過度,通常都是以打滑失控收場。
不過有轉向過度傾向的底盤設定實際上是協助車子入彎,而且在失控的範圍之內,它的過彎速度遠比轉向不足要快上許多,這也是為什麼幾乎所有的賽車都刻意將底盤的設定朝轉向過度多一點。汽車設計上有很多因素可以影響到轉向特性,比如車輛的軸距、輪距、車輛的重量、車輛的重量分配比例、懸吊結構和調教、輪胎、地面抓地力係數等,這些因素加起來形成一部車的轉向特性。
後輪驅動 vs. 前輪驅動,過彎特性有差嗎?
我們普遍能夠聽到的一種說法是前驅車的特性是轉向不足、後驅車的特性是轉向過度。這種說法不完全對,是一種比較片面的說法,也就是純粹由驅動力改變引發輪胎滑動的情況。前驅車的驅動力施加在前輪,突然增加驅動力自然會引發轉向不足。後驅車的驅動力施加在後輪,突然增加驅動力自然會引發轉向過度。這是一種人為製造的轉向不足或者轉向過度。
而我們可以人為改變的因素還有很多,比如增加離心力或降低抓地力。假設用很快的速度入彎,那無論前驅車還是後驅車都會發生轉向不足。又假設大力煞車的同時猛打方向盤,那無論前驅車還是後驅車都會發生轉向過度。
此外,四驅車是由四個車輪分擔整體驅動力,分配到每個驅動輪上的驅動力比前驅或者後驅車上的都要小,所以四驅車能夠承受更大的整體驅動力。這也就是為什麼四驅車通常要比前驅和後驅的過彎能力高。
那台86就是這樣過彎的!人家有練過別亂學喔!
基本上甩尾是轉向過度的現象,算是一種特殊的駕駛技巧,又叫「滑胎」或「漂移」。主要用在表演或是路況變化較大的賽車活動,其中又以越野賽裡應用頻率較多,而其他競速類的賽車則較少運用甩尾技巧過彎。這主要原因是甩尾雖然可以在過彎時保持較高的引擎轉速,但由於在一般柏油路面上過彎時車速減損較多,再加上輪胎損耗較大,除非是特殊原因,車手並不會經常在競賽過程中使用此技巧。他的原理是利用鎖死輪胎(後輪)或是大踩油門(後輪驅動),或是利用轉向貫性,使輪胎與地面的相對速度大幅提升,輪胎與地面由靜摩擦力變為動摩擦力,降低抓地力而出現打滑的狀況,產生轉向過度的效果。
延伸閱讀
 本文出自財團法人車輛研究測試中心;原文《汽車過彎的動態特性》,如需轉載,歡迎與車輛中心聯繫。
本文出自財團法人車輛研究測試中心;原文《汽車過彎的動態特性》,如需轉載,歡迎與車輛中心聯繫。


































{kind=link}
{kind=link}